Изобретение относится к робототехике и предназначено для использоваия в манипуляторах с большой степеью подвижности.
Целью изобретения является расшиение технологических возможностей а счет расширения зоны обслуживаия.
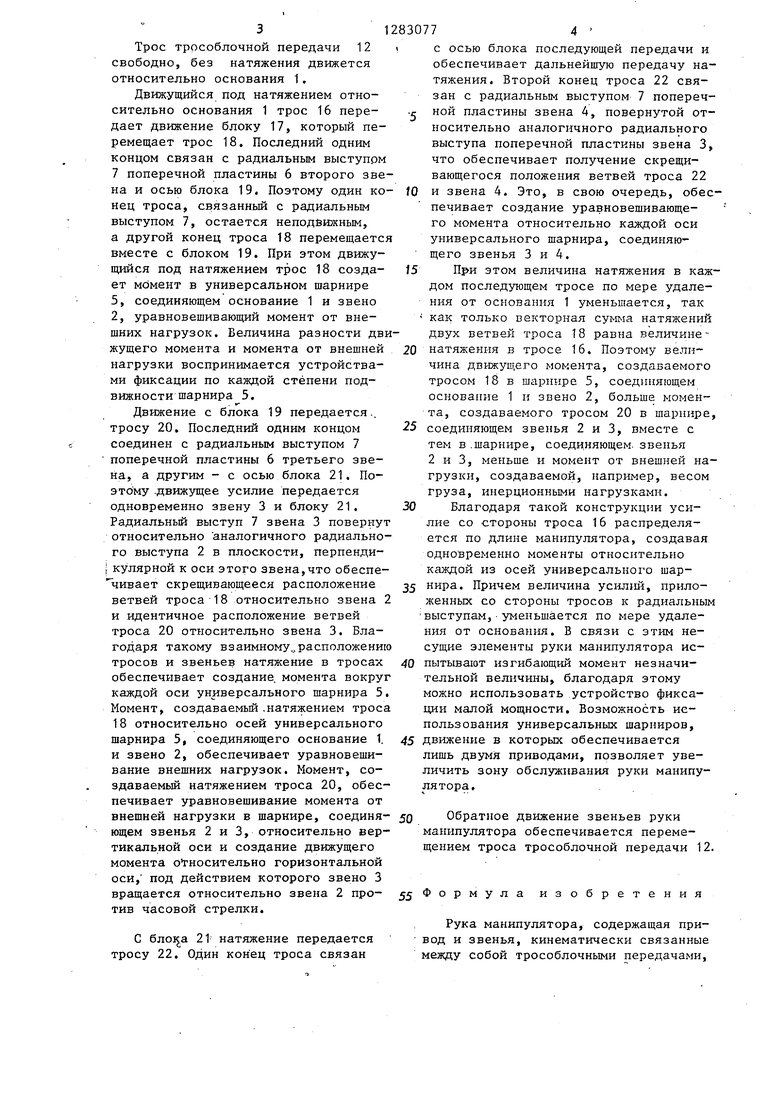
На фиг. 1 изображена кинематичесая схема руки манипулятораJ на иг. 2 - разрез А-А на фиг. 1; на иг. 3 - вид Б на фиг.2. ; -.
Рука манипулятора состоит из основания 1, на котором установлены звенья 2,3 и 4. С основанием 1 и между собой звеньч соединены универсальными шарнирами 5. Каждый шарнир 5 снабжен устройством фиксации звеньев по каждой степени подвижности (не показано). На каждом звене 2,3 и 4 установлена поперечная пластина 6, на которой вьшолнены радиальные выступы 7. Привод (не показан) установлен на основании 1. Кинематическая связь звеньев между собой и с приводом обеспечивается трособлочньии передачами 8-15.
Трос. 16 трособлочной передачи 8 одним концом соединен с приводом, а другим - с осью блока 17 трособлочной передачи 9. Трос 18 трособлочной передачи 9 соединен одним концом с радиальным выступом 7 поперечной пластины звена 2, а другим - с осью блока 19 трособлочной передачи 10,
Трос 20 трособлочной передачи 10 одним кондом соединен с радиальным выступом 7 поперечной пластины звена 3, а другим - с осью блока 21 трособлочной передачи 11.
Трос 22 трособлочной передачи 11 одним концом соединен с радиальным выступом 7 поперечной пластины звена 4, а другим - с осью блока последующей трособлочной передачи.
Радиальные выступы 7 двух последовательных звеньев повернуты друг относительно друга на угол, величина которого определяется соотношением момента от внешней нагрузки ,и движущего момента, в шарнире 5 по каждой степени подвижности в шарнире.
Например, радиальный выступ 7 зве- на 3 повернут относительно радиального выступа 7 звена 2 на 90, а ра- диальньй выступ 7 звена 4 повернут
относительно радиального выступа 7 звена 3 на угол, близкий к 90, что обеспечивает сбалансированность момента от внешней нагрузки и движущего момента в шарнире 5 по каждой степени подвижности.
Совокупность трособлочных передач 8-11 обеспечивает прямое движение звеньев 2,3 и в универсальных шарнирах 5.
Все последующие тросы и блоки трособлочных передач 12-15 установлены аналогично трособлочным передачам 8-11. На радиальных выступах 7, вы5 полненных на поперечных пластинах 6 звеньев 2,3 и 4, закреплены концы тросов двух последующих трособлочных передач 9-10, 10-11, повернутых друг относительно друга.
0 Тросы всех трособлочных передач имеют возможность контакта с поперечными пластинами 6 звеньев 2,3 и 4, так как в исходном состоянии они удалены от скругленного края попе речной пластины 6 этих звеньев.
ука манипулятора работает следующим образом.
0 В исходном состоянии все устройства фиксации относительного положения звеньев по каждой степени-подвижности включены. Тросы трособлочных передач находятся в натянутом
5 состоянии, обеспечивая выбор зазоров в шарнирах и узлах крепления , тросов, а также сбалансированность . момента от внешней нагрузки в каждом универсальном шарнире.
0
При необходимости совершить движение звеньев, например, 3 и 4 относительно звена 2 по часовой стрелке вокруг горизонтальной оси уни5 версального шарнира 5 перемещают трос 16 в направлении стрелки В (фиг.1). Одновременно отключают устройство фиксации вращения звена 3 относительно звена 2 вокруг горизон50 талькой оси универсального шарнира 5. При этом рука манипулятора приобретает возможность совершать движение только с одной степенью подвижности - вращение вокруг гори55 зонтальной шарнира 5, соединяющего звенья 2 и 3. Звенья 3 и 4 так же, как и основание 1 и звено 2, в это время представляют собой одно целое.
Трос тррсоблочной передачи 12 i свободно, без натяжения движется относительно основания 1,
Движущийся под натяжением относительно основания 1 трос 16 передает движение блоку 17, который перемещает трос 18. Последний одним концом связан с радиальным выступом 7 поперечной пластины 6 второго звена и осью блока 19, Поэтому один конец троса, связанный с радиальным выступом 7, остается неподйижным, а другой конец троса 18 перемещается вместе с блоком 19. При этом движу- пщйся под натяжением трос 18 создает мЬмент в универсальном шарнире 5, соединяющем основание 1 и звено 2, уравновешивающий момент от внешних нагрузок. Величина разности движущего момента и момента от внешней нагрузки воспринимается устройствами фиксации по каждой степени подвижности шарнира 5.
Движение с блока 19 передается . тросу 20. Последний одним концом соединен с радиальным выступом 7 поперечной пластины 6 третьего звена, а другим - с осью блока 21. Поэтому .движущее усилие передается одновременно звену 3 и блоку 21. Радиальньй выступ 7 звена 3 повернут относительно аналогичного радиального выступа 2 в плоскости, перпенди- кулярной к оси этого звена,что обеспе- чивает скрещивающееся расположение ветвей троса 18 относительно звена 2 и идентичное расположение ветвей троса 20 относительно звена 3. Благодаря такому взаимному,,расположению тросов и звеньев натяжение в тросах обеспечивает создание, момента вокруг каждой оси универсального шарнира 5. Момент, создаваемый.натяжением троса 18 относительно осей универсального шарнира 5, соединяющего основание 1. и звено 2, обеспечивает уравновешивание внешних нагрузок. Момент, создаваемый натяжением троса 20, обеспечивает уравновешивание момента от внешней нагрузки в шарнире, соединяющем звенья 2 и 3, относительно вертикальной оси и создание движущего момента о гносительно горизонтальной оси, под действием которого звено 3 вращается относительно звена 2 против часовой стрелки.
С 21 натяжение передается тросу 22. Один конец троса связан
с осью блока последующей передачи и обеспечивает дальнейшую передачу натяжения. Второй конец троса 22 связан с радиальным выступом 7 попереч- с ной пластины звена А, повернутой относительно аналогичного радиального выступа поперечной пластины звена 3, что обеспечивает получение скрещивающегося положения ветвей троса 22 0 и звена 4. Это, в свою очередь, обеспечивает создание уравновешивающего момента относительно каждой оси универсального шарнира, соединяю- щего звенья 3 и 4.
J5 При этом величина натяжения в каждом последующем тросе по мере удаления от основания 1 уменьшается, так как только векторная сумма натяжений двух ветвей троса 18 равна величине- 0 натяжения в тросе 16. Поэтому величина движущего момента, создаваемого тросом 18 в шарнире 5, соединяющем основание 1 и звено 2, больше момента, создаваемого тросом 20 в шарнире, 5 соединяющем звенья 2 и 3, вместе с тем в.шарнире, соединяющем, звенья 2 и 3, меньше и момент от внешней нагрузки, создаваемой, например, весом груза, инерционными нагрузками. 0 Благодаря такой конструкции усилие со стороны троса 16 распределяется по длине манипулятора, создавая одновременно моменты относительно каждой из осей универсального шар- 5 нира. Причем величина усилий, приложенных со стороны тросов к радиальным выступам,уменьшается по мере удаления от основания. В связи с этим несущие элементы руки манипулятора ис- 0 пытывают изгибающий момент незначительной величины, благодаря этому можно использовать устройство фиксации малой мощности. Возможность использования универсальных шарниров, 5 движение в которых обеспечивается лишь двумя приводами, позволяет увеличить зону обслуживания руки манипулятора.
0 Обратное движение звеньев руки манипулятора обеспечивается перемещением троса трособлочной передачи 12.
55 Формула изобретения
Рука манипулятора, содержащая при- вод и звенья, кинематически связанные между собой трособлочными передачами.
при.. 3Tj0M каждое звено снабжено поперечной пластиной, а между собой званья соединены шарнирно и каждый шарнир снабжен устройством фиксации относительного положения смежных зве- ньев, причем трос первой трособлочной передачи одним концом соединен с приводом, а другим - с осью блока трособлочной передачи последующего звена, трос последней трособлочной передачи одним концом соединен с предьщущим звеном, несущим рабочий орган, при этом трос каждой промежуточной трособлочной передачи одним концом соединен с предьщущим звеном, а другим с осью блока трособлочной передачи последующего звена и расположен над поперечной пластиной предыдущего звена с возможностью контакта с ней, отличающаяся тем, что, с целью расширения технологических возможностей за счет расщирения зоны обслуживания, на.поперечной пластине каждого звена выполнены радиальные выступы, а концы тросов трособлочной передачи каждого последующего звена соединены соответственно со смежным предьщзшщм звеном посредством этих радиальных выступов поперечной пластины.
W
л
18
Фи2.. ЬиВб
г
22
teJ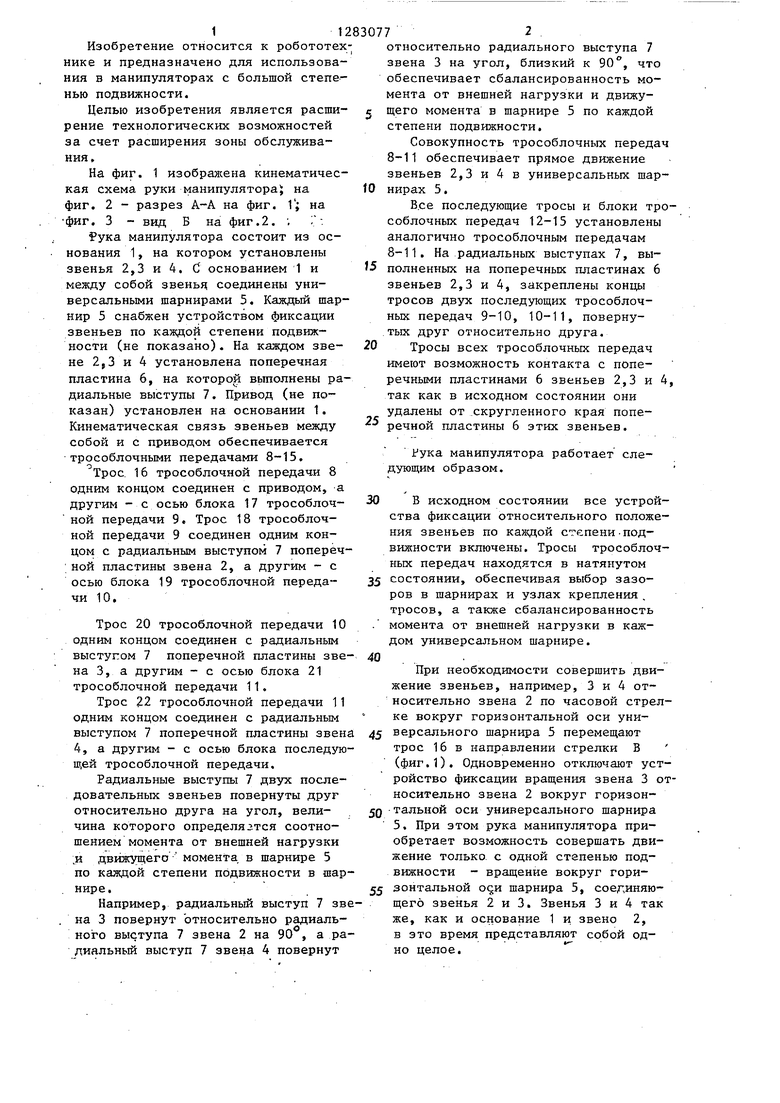
| название | год | авторы | номер документа |
|---|---|---|---|
| Рука манипулятора | 1984 |
|
SU1225778A1 |
| Манипулятор | 1986 |
|
SU1404324A1 |
| Рука манипулятора | 1987 |
|
SU1450995A1 |
| Рука манипулятора | 1985 |
|
SU1321576A1 |
| Рука манипулятора | 1985 |
|
SU1263520A1 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| Манипулятор | 1985 |
|
SU1283085A1 |
| Схват манипулятора | 1986 |
|
SU1342730A1 |
| Рука тензорного манипулятора | 1983 |
|
SU1114545A1 |
| Рука манипулятора | 1985 |
|
SU1306705A1 |
Изобретение относится,к области робототехники и предназначено для использования в манипуляторах с большой степенью подвижности. Цель - расширение технологических возможностей за счет увеличения зоны обслуживания. Рука манипулятора содержит звенья 2-4 с поперечными пластинами ,6, связанные между собой универсальными шарнирами 5, с устройствами фиксации по каждой степени подвижности с индивидуальным приводом и трособлочные передачи 8-15, обеспечивающие относительное движение звеньев от.привода, установленного на основании. Концы тросов каждой трособлочной передачи закреплены соответственно на оси блока последующей трособлочной передачи и на радиальном выступе 7 поперечной Пластины 6 соответствующего зве- на. Радиальные выступы 7 на соседних звеньях повернутыдруг относительно друга. Натяжение трособлочных передач обеспечивает создание моментов вокруг оси каждого универсального шарнира 5 и перераспределение внешней на- грузки между звеньями и трособлочны- ми передачами. 3 ил. i (/ 75- б 4л б //17 П к 3 9/ /7 о - , 2} I /22 ND 00 о 
Редактор И. Рыбченко
Составитель И. Бакулина
Техред А.Кравчук Корректор М. Самборская
Заказ 7343/13 . . Тираж 949
БНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Подписное
| Рука манипулятора | 1984 |
|
SU1225778A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
