IN:)
со
о
о:
Изобретение относится к манипуляторам с ручным управлением, предназначенным для механизации труда рабочего, связанного со сборкой резьбовых соединений, сверлением отверстий, зачисткой отливок и т. п., и может быть использовано в различных отраслях промышленности, преимущественно в машиностроении.
Известен манипулятор, включающий поворотное основание, на котором установлены исполнительный орган в виде пантографа с захватом, и блок управления 1.
Однако известный манипулятор имеет низкую производительность.
Известен также манипулятор с ручным управлением, содержаш,ий основание, источник сжатого воздуха, рукоятку управления и поворотную колонну, на которой установлен исполнительный орган в виде пантографа с рабочим органом, при этом пантограф шарнирно связан со штоком силового цилиндра вертикального перемещения и с направляющими горизонтального перемещения 2.
Недостаток этого .манипулятора состоит в повышенной трудое.мкости .его обслуживания в связи с тем, что необходимо физическое усилие оператора при работе с рабочи.м органом (дрелью, отбойны.м молотком и т. д.), что повышает утомляемость oneратора, а следовательно снижает его производительность.
Цель изобретения - снижение трудоемкости обслуживания и повышение производительности манипулятора.
Поставленная цель достигается тем, что манипулятор с ручным управлением, содержащий основание, источник сжатого воздуха, рукоятку управления и поворотную колонну на которой установлен исполнительный орган в виде пантографа с рабочим органом, при этом пантограф шарнирно связан со штоком силового цилиндра вертикального перемещения и с направляюп1ими горизонтального перемещения, снабжен гибким трубонроводом с клапаном, тормозом, смонтированным в направляющих горизонтального перемещения с возможностью взаимодействия с шарниром пантографа, и сервоприводо.м, шарнирно установленные на пантографе, причем на штоке сервопривода закреплен рабочий орган, а тормоз и сервопривод связаны между собой гибким трубопроводом, причем последний посредством клапана соединен с источником сжатого воздуха. .
На фиг. изображен манипулятор, общий вид; на фиг. 2 - разрез А-А на фиг. 1.
Манипулятор состоит из основания 1, на котором с возможностью поворота вокруг вертикальной оси установлена поворотная колонна 2. Исполнительный орган выполнен в виде пантографа 3 с рабочи.м органом 4 (механизированным инструментом, гайковертом, дрелью, отбойным молотком) и
шарнирно соединен со щтоком 5 силового цилиндра 6 вертикального перемещения пантографа и горизонтальными направляющими 7. Поршневая полость силового цилиндра 6 вертикального перемещения соединена с источником сжатого воздуха. Рабочий орган 4 закреплен на щтоке 8 сервопривода 9, корпус которого шарнирно связан с пантографом 3. В горизонтальных направляющих пантографа смонтирован тормоз 10, выполненный в виде приводной фрикционной накладки 11.,
Фрикционная накладка 11 выполнена по всей длине горизонтальных направляющих и.при необходимости взаимодействует с перемещающимся в указанных направляющих сухарем 12, в котором располож-ено шарнирное соединение пантографа 3. Тормоз
10и сервопривод 9 соединены между собой гибким трубопроводом 13, а клапан 14 предназначен для соединения их с источником сжатого воздуха (не показан) и рукояткой 15 управления.
Манипулятор работает следуюшим образом.
При установке на шток 8 сервопривода 9 рабочего органа 4, например механизированного инструмента (гайковерт, отбойный молоток, электродрель), включается силовой цилиндр 6 вертикального перемещения пантографа 3, и оператор вручную манипулирует, например гайковертом 4, и устанавливает его в нужное положение. Затем движением рукоятки 15 управления открывается клапан 14, и сжатый воздух одновременно подводится в тормоз 10,установленный в горизонтальных направляющих 7 пантографа 3, и полость сервопривода 9, сообщая гайковерту 4 горизонтальное перемещение. Движением рукоятки 15 оператор может регулировать давление возд,ха в полостях тормоза и сервопривода. При включении тормоза 10 фринционная накладка11соединяется с сухарем 12, в. котором расположено щарнирное соединение пантографа 3, и фиксирует его в горизонтальном направлении. В результате фиксации в горизонтальном направлении шарнирного соединения пантографа 3 вся пантографная система манипулятора запирается в горизонтально.м направлении, и оператор с по. мощью сервопривода 9, при помощи которого создаются осевые нагрузки на инстру.мент, без приложения физических усилий, выполняет необходимые операции, например, по сборке резьбовых соединений, сверлению отверстий или зачистке отливок и т. п., в зависимости от инструмента, навещиваемого на пантограф.
Изобретение позволяет снизить физическое усилие оператора, обслуживающего .манипулятор, снизить его уто.мляе.мость и трудоемкость, а следовательно повысить производительность.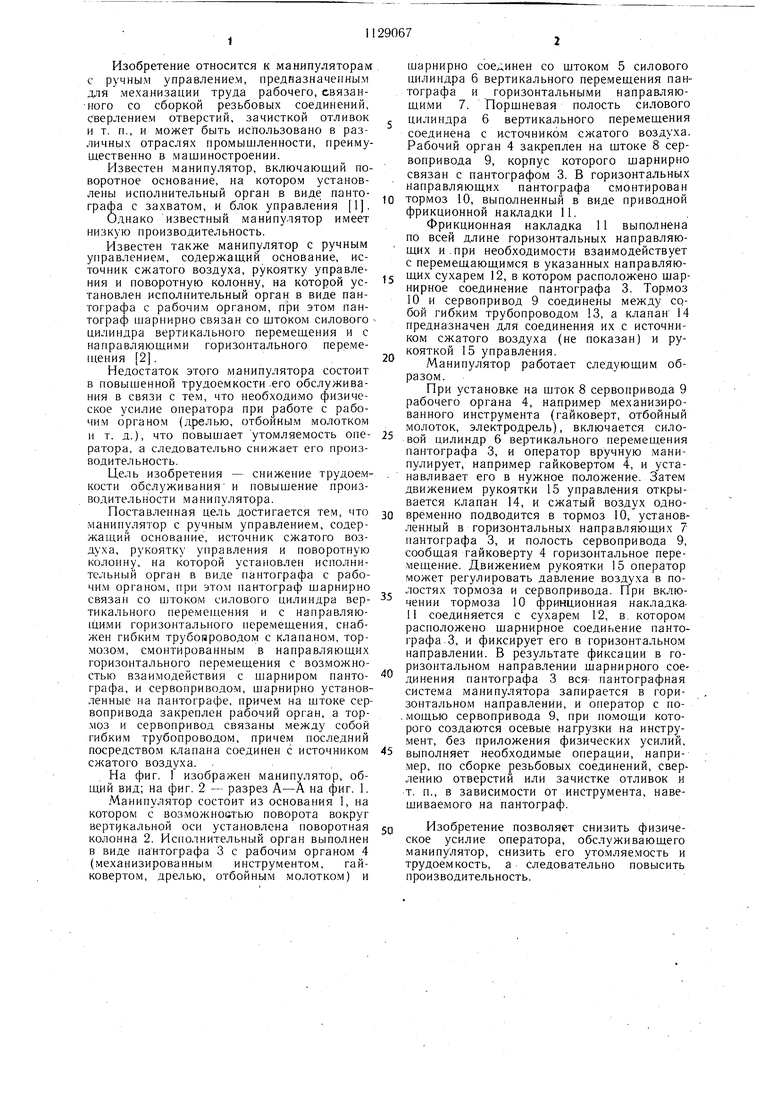
| название | год | авторы | номер документа |
|---|---|---|---|
| Сбалансированный манипулятор с ручным управлением | 1988 |
|
SU1618634A1 |
| Манипулятор | 1982 |
|
SU1045992A1 |
| Манипулятор | 1982 |
|
SU1148776A1 |
| УСТРОЙСТВО С ПРЯМЫМ УПРАВЛЕНИЕМ, В ЧАСТНОСТИ С ПРОПОРЦИОНАЛЬНЫМ И/ИЛИ ЛИНЕЙНЫМ УПРАВЛЕНИЕМ, ДЛЯ СИСТЕМЫ ПОГРУЗКИ И/ИЛИ РАЗГРУЗКИ ЖИДКОСТИ | 2008 |
|
RU2488547C2 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| Манипулятор | 1976 |
|
SU538957A1 |
| Копирующий манипулятор | 1980 |
|
SU1024265A1 |
| СТАНОК ДЛЯ ОБРУБКИ, КЛЕПКИ, ТРАМБОВКИ | 2009 |
|
RU2412783C1 |
| Автоматический манипулятор | 1983 |
|
SU1119836A1 |
| Манипулятор с ручным управлением | 1985 |
|
SU1315288A1 |
МАНИПУЛЯТОР С РУЧНЫМ УПРАВЛЕНИЕМ, содержащий основание, источник сжатого воздуха, рукоятку управления и поворотную колонну, на которой установлен исполнительный орган в виде пантографа с рабочим органом, при этом пантограф шарнирно связан со штоком силового цилиндра вертикального, перемещения и с направляющими горизонтального перемещения, отличающийся тем, что, с целью снижения трудоемкости его обслуживания и повыщения производительности, он снабжен гибким трубопроводом с клапаном, тормозом, смонтированны.м в направляющих горизонтального перемещения с возможностью взаимодействия с щарниром пантографа, и сервоприводом, щарнирно установленным на пантографе, причем на щтоке сервопривода закреплен рабочий орган, а тормоз и сервопривод связаны между собой гибким трубопроводом, причем последний посредством клапана соединен с источником сжатого воздуха.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| «Механизация и автоматизация производства | |||
| Способ получения фтористых солей | 1914 |
|
SU1980A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Проспект фирмы «Далмен, Италия, 1974 (прототип). | |||
