Изобретение относится к робототехнике и может быть использовано в машиностроении для автоматического перемещения изделий или рабочих органов по сложным траекториям.
Известен промышленный робот, содержаш,ий основание с размещенной на нем поворотной колонной, на которой размещена посредством горизонтальной и вертикальной кареток механическая рука, связанная с приводом 1.
Однако известное устройство характеризуется низкой наадежностью и производительностью из-за недостаточной жесткости конструкции.
Цель изобретения - повышение надежности и производительности.
Поставленная цель .достигается тем, что промышленный робот, содержащий основание с размещенной на нем поворотной колонной, на которой посредством горизонтальной и вертикальной кареток установлена механическая рука, связанная с приводом, снабжен кривошипно-шатунным механизмом и винтовой парой, а механическая рука выполнена в виде кулисного механизма, кулиса которого щарнирно закреплена на горизонтальной каретке, а камень - на Вертикальной каретке, при этом гайка винтовой пары закреплена на горизонтальной каретке, а винт посредством дополнительно введенной передачи связан с приводом и с кривошипом кривошипно-шатунного механизма, причем шатун последнего шарнирно соединен с вертикальной кареткой.
На чертеже изображен промышленный робот.
Устройство содержит основание 1, поворотную колонну 2, горизонтальную каретку 3 с гайкой 4, установленной в направляющих 5 на винте 6, вертикальную каретку 7, механическую руку - кулису 8 с камнем 9, связанным с кареткой 7, и привод, состоящий из двигателя 10, набора шестерни 11, кривошипа 12 и щатуна 13, связанного с вертикальной кареткой. Предусмотрен при необходимости поворот колонны 2 с помощью дополнительной пары конических зубчатых колес. 14 и 15. На кулисе размещен схват -16.
Обе каретки - горизонтальная и вертикальная приводятся в движение от одного привода: -горизонтальная каретка с помощью винтовой пары , а вертикальная - с помощью щатуна 13, связанного с кривощипом 12. За один .оборот кривошипа 12 вертикальная каретка совершает возвратнопоступательное движение вдоль вертикальной оси, а горизонтальная каретка движется по направляющим 5 от центра к периферии (направление движения указано стрелками). При этом схват, установленный на кулисе 8, совершает движение по сложной траектории. По завершении полного оборота коленчатого вала двигатель реверсируется, и схват по этой же траектории возвращается в исходную позицию.
Технико-экономическое преимущество изобретения по сравнению с прототипом состоит в увеличении скорости работы за счет общего привода кареток, увеличении жесткости и надежности системы, так как механическая рука робота выполнена в виде кулисы, связанной с каретками.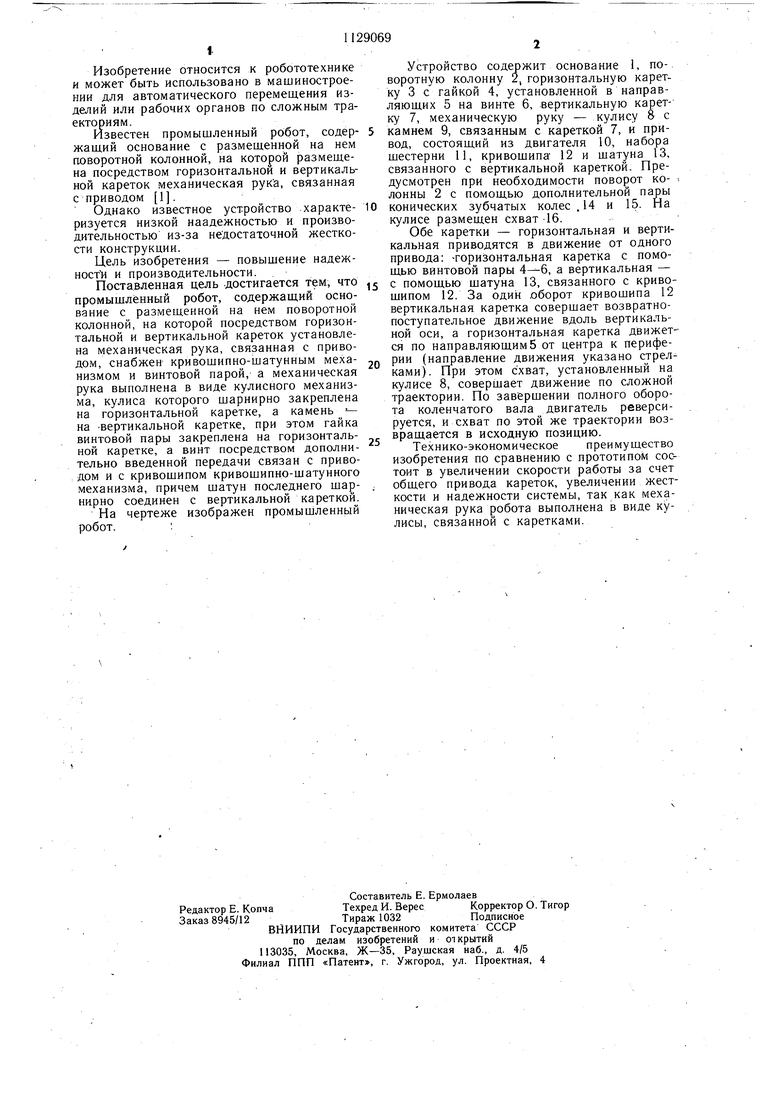
| название | год | авторы | номер документа |
|---|---|---|---|
| Автооператор | 1989 |
|
SU1685675A1 |
| Устройство для сварки продольных и кольцевых швов труб и трубных пересечений | 1960 |
|
SU139753A1 |
| Манипулятор | 1982 |
|
SU1085804A1 |
| Радиально-ковочная машина | 1976 |
|
SU671104A1 |
| Коммутационное устройство дляКОМплЕКТНыХ РАСпРЕдЕлиТЕльНыХуСТРОйСТВ | 1979 |
|
SU817779A2 |
| Манипулятор | 1984 |
|
SU1194673A1 |
| Радиально-ковочная машина | 1991 |
|
SU1796333A1 |
| ПРИВОД УПРАВЛЕНИЯ ПРИСЛОННО-СДВИЖНОЙ ДВЕРИ ТРАНСПОРТНОГО СРЕДСТВА | 2022 |
|
RU2792906C1 |
| ПРОТЯЖНАЯ РАДИАЛЬНО-КОВОЧНАЯ МАШИНА | 1992 |
|
RU2136429C1 |
| Манипулятор | 1985 |
|
SU1331638A1 |
ПРОМЫШЛЕННЫЙ РОБОТ, содержащий основание с размещенной на нем поворотной колонной, на которой посредством горизонтальной и вертикальной кареток установлена механическая рука, связанная с приводом, отличающийся тем, что, с целью повышения надежности и производительности, он снабжен кривошипно-шатунным механизмом и винтовой парой, а механическая рука выполнена в виде кулисного механизма, кулиса которого шарнирно закреплена на горизонтальной каретке, а камень на вертикальной каретке, при этом гайка винтовой пары закреплена на горизонтальной каретке, а винт посредством дополнительно введенной передачи связан с приводом и с кривошипом кривошипно-шатунного механизма, причем щатун последнего шарнирно соединен с вертикальной кареткой. / Г
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Промышленный робот | 1977 |
|
SU837850A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
