ND
Од 00
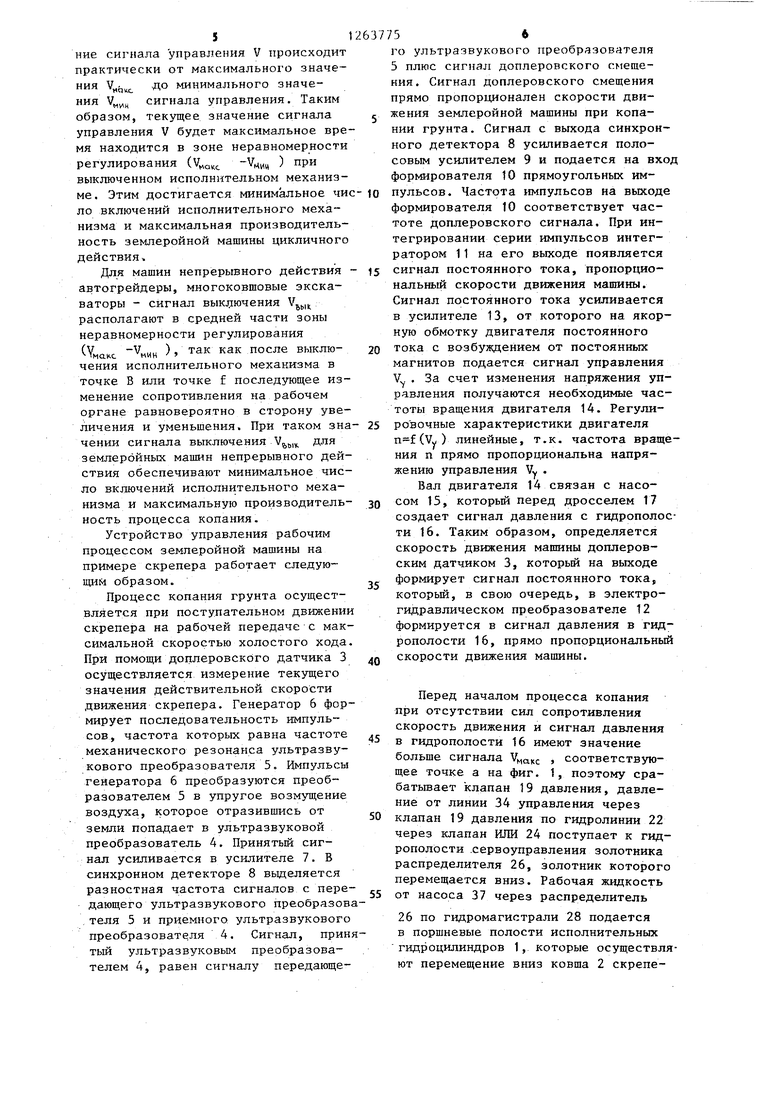
Изобретение относится к землерой ным машинам цикличного и непрерывно го действия, а именно к скреперам, бульдозерам, автогрейдерам, экскава торам и др. Цель изобретения - повьпиение про ,изводительности достигается тем, что дополнительно задают значение сигнала выключения, которое сравнивают с текущим значением сигнала уп равления и по изменению знака этого сравнения при выглублении рабочего органа вырабатывают сигнал выключения золотника по условию если V-V,, то х -X при заглублении рабочего органа выр батывают сигнал выключения золотни ка по условию О, то если V-V, Для землеройных маишн цикличного действия -скреперы, бульдозеры-значение сигнала выключения золотника смещают к заданному максимальному или минимальному значению сигнала управления, которое соответствует минимальному значению сил сопротивления на рабочем органе. На фиг. 1 показана диаграмма управления рабочим процессом землерой ной машины цикличного действия; на фиг, 2 - диаграмма управления рабочим процессом землеройной машины не прерывного действия; на-фиг. 3 система управления рабочим процессо землеройной машины на примере скрепера. На фиг. 1 и 2 обозначены: V. - те кущее значение сигнала управления; MJKC максимальное значение сигнала управления; V - минимальное значение управления; Vp, - значение сигнала выключения золотника; t - время. На фиг. 3 устройство управления рабочим процессом землеройной машины на примере скрепера содержит исполнительный гидроцилиндр 1 управ ления ковшом 2 скрепера, доплеровский датчик 3 измерения скорости д жения скрепера, состоящий из ультр звуковых преобразователей 4 и 5, г нератора 6 ультразвуковой частоты, усилителя 7, синхронного детектора полосового усилителя 9, формироват ля 10 прямоугольных импульсов, инт ратора 11; олек-i ро идратзлическш преобразователь 12, состоящий из усилителя 13 постоянного тока, рхсщ которого подключен к выходу преобразователя действительной скорости движения V, а выход усилителя 13 связан с двигателем 14 постоянного тока, вал которого соединен с насосом 15, который связан с гидрополостью 16 сигнала давления, дросселем 17 и баком 18. Задатчики и элементы сравнения макс и мин сигнала управления выполнены в виде клапанов 19 и 20 давления, входы которых гидролинией 21 связаны с гидрополостью 16 сигнала давления, а выходы гидролиниями 22 и 23 соединены через клапаны RFIH 24 и 25 с гидрополостями сервоуправления золотника распределителя 26, который гидромагйстралями 27 и 28 соединен с полостями исполнительных гидроцилиндров 1. Задатчики и элементы сравнения сигнала выключения золотника выполнены в виде клапанов 29 и 30 давления, входы которых гидролинией 21 соединены с гидрополостью 16 сигнала давления, а выходы - гидролиниями 22 и 23 связаны с полостями сервоуправления золотника распределителя 26 и гидролиниями 31 и 32 связаНЕ)1 со сливом в бак 33. Гидролиния 34 питания рабочей жидкостью соединена с клапанами 19 и 20, гидролинии 35 и 36 ручного управления подключены к золотнику распределителя 26. Насос 37 подключен к золотнику 26 и гидролинии 34 питания. Управление рабочим процессом землеройной машины по предлагаемому способу осуществляют следующим образом. Процесс копания грунта начинают путем заглубления движущегося рабочего органа в грунт. В процессе копания грунта измеряют текущее значение сигнала управления V (фиг. 1,2) и сравнивают его с заданным максимальным V,, и минимальным V,,, значениями сигнала управления. Если разность текущего и максимального значений сигнала управления больше или равна нулю, то вырабатывают сигнал включения исполнительного мехаго органа О, то если V-V где X - сигнал -управления исполнительным механизмом. Этому состоянию на диаграммах (фиг. 1 и 2) соответствует точка а в которой исполнительный механизм включают для заглубления рабочего органа. При заглублении рабочего органа измеряют текущее значение сигнала управления V и сравнивают его с заданным значением сигнала выключе ния УЙЫК исполнительного механизма. Если при заглублении разность значения сигнала управления и заданного значения сигнала выключения меньше или равна нулю, то вырабатывают сигнал выключения х исполнительного механизма если V-V 4 О, то Этому состоянию соответствует точка Ь , в которой выключают исполнительный механизм. Участок об диа грамм соответствует заглублению ра бочего органа. При копании грунта сопротивлени на рабочем органе возрастают. В пр цессе копания измеряют текущее зна чение сигнала управления V и сравнивают его с заданн 1м минимальным значением сигнала управления V . Если разность текущего и минимального значений сигнала управления меньше или равна нулю, то вырабатьшают сигнал включения исполнител ного механизма для выглубления рабочего органа если О, то Этому состоянию на диаграммах (фиг. 1 и 2) соответствует точка С в которой производят включение исполнительного механизма для выглуб ления рабочего органа. При выглублении рабочего органа уменьшаются сопротивления и происх дит увеличение текущего значения си нала управления V. В процессе выглубления рабочего органа тек5лцее значение сигнала управления V срав нивают с заданным значением сигнал выключения , исполнительного ме ханизма. Если разность текущего зн чения сигнала управления и заданно значения сигнала выключений исполн тельного механизма больше или равн 54 нулю, то вырабатывают сигнал выключения исполнительного механизма если О, то Этому состояниюна фиг. 1 и 2 соответствует точка d, в которой выключают исполнительный механизм при выглублении рабочего органа. Если при копании грунта произошло резкое уменьшение нагрузки на отвале, например, соответствующее точке А на фиг. 1, 2, при котором текущее значение V сигнала управления больше заданного значения сигнала управления , то вырабатьшают сигнал для заглубления рабочего органа. При заглублении отвала сравнивают текущее значение сигнала управления с сигналом выключения золотника и в точке Б выключают исполнительный механизм. Таким образом, разработанный способ управления позволяет в процессе копания стабилизировать текущее значение сигнала управления в заданных пределах (V VMH,H ) В конкретных грунтовых условиях задают оптимальные значения максимального V. И минимального V,, пределов изменения сигнала управления, при которых обеспечивается максимальная производительность машины при копании грунта. Для машин цикличного действия скреперы, бульдозеры-значение сигнала выключения Х., смещают к пределу, соответствующему минимальному значению сил сопротивления на рабочем органе. На фиг. 1 для скрепера при управлении рабочим процессом по скорости движения значение сигнала . выключения исполнительного механиз- ма V{,j,in смещено к заданному значению сигнала управления V, - . Особенность способа управления в этом случае заключается в следующем. После выключения исполнительного механизма в точке 6 или точке f копание грунта производят при зафиксированном (неуправляемом) состоянии рабочего органа относительно рамы машины. Однако вследствие увеличения объема вырезаемого грунта при поступательном движении машины сопротивления на рабочем органе возрастают и уменьшается текущее значение сигнала управления V. Это уменьше512637
ние сигнала управления V происходит практически от максимального значения У„ до минимального значесигнала управления. Таким
ния У„
образом, текущее значение сигнала управления V будет максимальное время находится в зоне неравномерности регулирования (V ит Р выключенном исполнительном механизме. Этим достигается минимальное чи ло включений исполнительного механизма и максимальная производительность землеройной машины цикличного действия
Для машин непрерывного действия автогрейдеры, многоковшовые экскаваторы - сигнал выкJJючeния Vj располагают в средней части зоны неравномерности регулирования (У„акс иин ), так как после выключения исполнительного механизма в точке В или точке f последующее изменение сопротивления на рабочем органе равновероятно в сторону увеличения и уменьшения. При таком зна
чении сигнала выключения V,
для
ьы.
землеройных машин непрерывного действия обеспечивают минимальное число включений исполнительного механизма и максимальную производительность процесса копания.
Устройство управления рабочим процессом землеройной машины на примере скрепера работает следующим образом.
Процесс копания грунта осуществляется при поступательном движении скрепера на рабочей передаче с максимальной скоростью холостого хода При помощи доплеровского датчика 3 осуществляется измерение текущего значения действительной скорости движения скрепера. Генератор 6 формирует последовательность импульсов, частота которых равна частоте механического резонанса ультразвукового преобразователя 5. Импульсы генератора 6 преобразуются преобразователем 5 в упругое возмущение воздуха, которое отразившись от земли попадает в ультразвуковой преобразователь 4. Принятый сигнал усиливается в усилителе 7. В синхронном детекторе 8 вьщеляется разностная частота сигналов с передающего ультразвукового преобразовтеля 5 и приемного ультразвукового преобразователя 4. Сигнал, принтый ультразвуковым преобразователем 4, равен сигналу передающе75«
го ультразвукового преобразователя 5 плюс сигнал доплеровского смещения. Сигнал доплеровского смещения прямо пропорционален скорости движения землеройной машины при копании грунта. Сигнал с выхода синхронного детектора 8 усиливается полосовым усилителем 9 и подается на вхо формирователя 10 прямоугольных импульсов. Частота импульсов на выходе формирователя 10 соответствует частоте доплеровского сигнала. При интегрировании серии импульсов интегратором 11 на его выходе появляется сигнал постоянного тока, пропорциональный скорости движения мапшны. Сигнал постоянного тока усиливается в усилителе 13, от которого на якорную обмотку двигателя постоянного тока с возбуждением от постоянных магнитов подается сигнал управления V. За счет изменения напряжения управления получаются необходимые частоты вращения двигателя 14. Регулировочные характеристики двигателя (Vy) линейные, т.к. частота вращения п прямо пропорциональна напряжению управления Vy .
Вал двигателя 14 связан с насосом 15, который перед дросселем 17 создает сигнал давления с гидрополости 16. Таким образом, определяется скорость движения машины доплеровским датчиком 3, который на выходе формирует сигнал постоянного тока, который, в свою очередь, в электрогидравлическом преобразователе 12 формируется в сигнал давления в гидрополости 16, прямо пропорциональный скорости движения машины.
Перед началом процесса копания при отсутствии сил сопротивления скорость движения и сигнал давления в гидрополости 16 имеют значение больше сигнала Уца , соответствующее точке а на фиг. 1, поэтому срабатьшает клапан 19 давления, давление от линии 34 управления через клапан 19 давления по гидролинии 22 через клапан ИЛИ 24 поступает к гидрополости .сервоуправления золотника распределителя 26, золотник которого перемещается вниз. Рабочая жидкость от насоса 37 через распределитель
26 по гидромагистрали 28 подается в поршневые полости исполнительных гидроцилиндров 1, которые осуществляют перемещение вниз ковша 2 скрепе7pa и заглубление его в грунт. При заглублении ковша в грунт возрастают силы сопротивления и соответственно уменьшается скорость движения машины и сигнал давления в гидрополости 16, Золотник распределителя 26 остается включенным и происходит заглубление ковша 2 до момента срабатывания клапана давления 29 настроенного на сигнал выключения золотни ка. При срабатывании клапана 29 давления гидролиния 22 сообщается с гидролинией 31 и со сливом в бак, поэтому золотник распределителя 26 выключается, устанавливая исполнительные гидроцилиндры 1 в запертое положение. Это состояние соответствует точке Ь на фиг. 1. При поступательном движении скре пера вырезаемый грунт поступает в ковш и по мере его наполнения возра та:ют сопротивления движению и падае скорость движения скрепера. Когда скорость движения скрепера достигнет минимального заданного значения при котором сигнал давления в гидро полости соответствует У„,,ц , например в точке С на фиг. 1, срабатывает клапан 20 давления и давление от гидролинии 34 через клапан 20 по гидролинии 23 подается к гидрополос ти сервоуправления через клапан ИЛИ 25, осуществляя переключение вверх золотника распределителя 26. Рабочая жидкость от насоса 37 через распределитель 26 по гидромагистрали 27 подается к штоковым полостя исполнительных гидроцилиндров 1, осуществляя подъем ковша 2 и уменьшение толщины вырезаемой стружки. В результате уменьшения сопротивлений на ковш возрастает скорость дви жения и сигнал давления в гидрополости 16. Когда сигнал давления V повысится до значения М , срабаты вает клапан 30 давления и соединяет гидролинию 23 с гидролинией 32 и со сливом в бак. С этого момента золотник распределителя 26 устанавливается в запертое положение, соот ветствующее точке d на фиг. 1, прекращая выглубление ковша 2 и уменьшение толщины вырезаемой стружки. Далее процесс копания грунта проис5ходит при запертом положении исполнительных гидроцилиндров 1. При движении скрепера продолжается заполнение ковша и увеличение сил сопротивлений. Снова в некоторый момент скорость движения достигнет нижнего значения, при котором сработает клапан 20 давления и произойдет уменьшение толщины вырезаемой стружки. Рассмотренные циклы повторяются до тех пор, пока произойдет заполнение ковша грунтом. Таким образом, предложенный способ осуществляет автоматически,без участия оператора.заполнение ковша грунтом. Формула изобретения Способ управления рабочим процессом землеройной машины, по которому измеряют текущее значение сигнала управления V, сравнивают его с заданными максимальным , и минимальным Ущ,ц значениями сигнала управления и по изменению знака этого сравнения формируют сигнал управления включением рабочего органа, причем выглубление рабочего органа производят по условию v-v,«H О, а заглубление - по условию тличающийся тем, что, целью повьш ения производительносдополнительно задают значение сигнала выключения V. меньше сигнала управления максимального значения (. , которое сравнивают с текущим значением сигнала управлений, и по результату этого сравнения формируют сигнал выключения рабочего органа при выглублении по условию а при заглублении - по условию V-V,,, 4 0.
Фиг
Z.
:
J
9ut.Z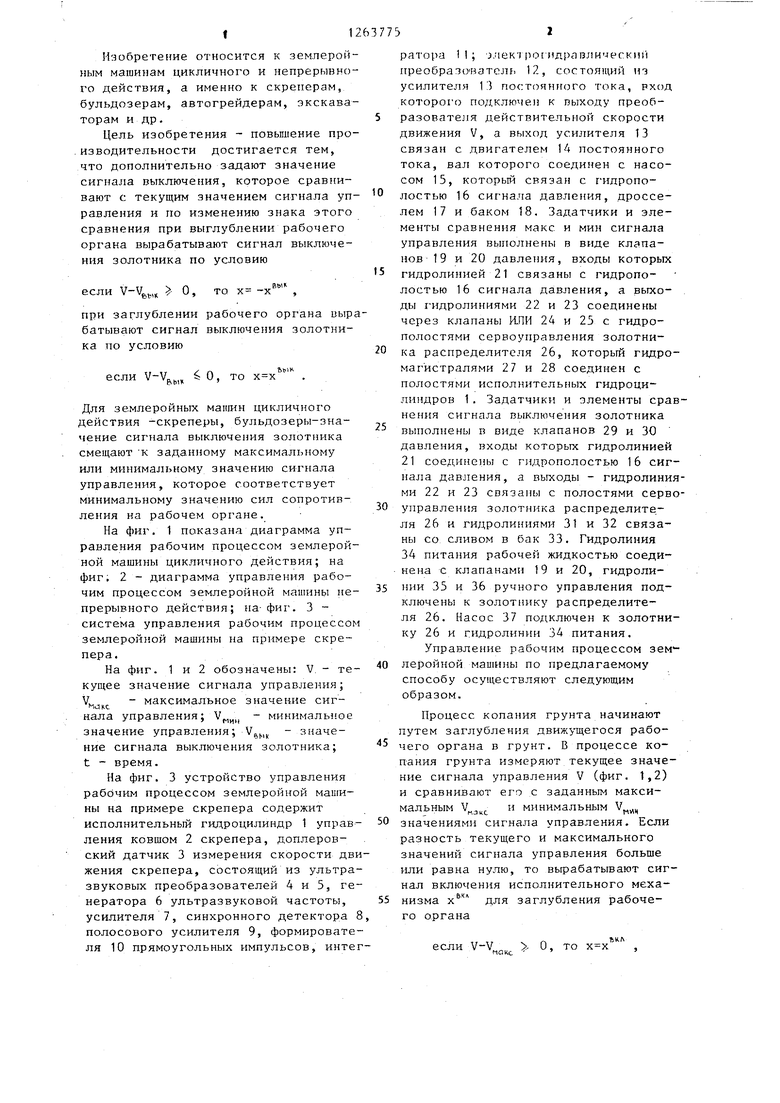

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления ковшом скрепера и устройство для его осуществления | 1987 |
|
SU1495417A1 |
| Система управления рабочим процессом землеройно-транспортной машины | 1985 |
|
SU1283313A1 |
| Устройство управления рабочим процессом землеройно-транспортной машины | 1986 |
|
SU1323672A1 |
| Гидросистема управления рабочим процессом бульдозера | 1983 |
|
SU1129302A1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ КОПАНИЯ ГРУНТА ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2232234C2 |
| Способ управления ковшом скрепера | 1987 |
|
SU1578278A1 |
| Устройство для автоматического управления рабочим органом землеройной машины | 1985 |
|
SU1308720A1 |
| СПОСОБ КОПАНИЯ ГРУНТА СКРЕПЕРОМ С ПОСТОЯННОЙ ГЛУБИНОЙ РЕЗАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2229564C2 |
| Способ управления рабочим процессом бульдозера | 1985 |
|
SU1239233A1 |
| Гидропривод рабочего органа землеройно-транспортной машины | 1988 |
|
SU1647094A2 |

Изобретение относится к области автоматического управления рабочими процессами землеройно-транспортных машин и позволяет повысить их производительность. В процессе копания измеряют текущее значение сигнала управления V и сравнивают его с задакнымк максимальным , и минимальным VMUH значениями. Формируют сигнал управления включением рабочего органа (РО) при его выглублении при условии 40, а при заглублении РО - при V-V 0. Дополнительно задают значение сигнала выключения меньше V, Сравнивают его с 61.1 макс V и формируют сигнал выключения РО при выглублении при условии О, р S а при заглублении - при усдовии бык 0- f- обр. V стабилизируется ел в процессе копания в заданных предес лах (V, -VM.,.. ). 3 ил. МИЧ MQKt
| Патент США | |||
| № 4194574, кл | |||
| Приспособление для воспроизведения изображения на светочувствительной фильме при посредстве промежуточного клише в способе фотоэлектрической передачи изображений на расстояние | 1920 |
|
SU172A1 |
| Способ получения фтористых солей | 1914 |
|
SU1980A1 |
| Гидросистема управления рабочим процессом бульдозера | 1983 |
|
SU1129302A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
