36
00 ел 4; со
го
Шаг. 2
. Изобретение относится к шинной нро- |мышленности и является усовершенствова- |нием устройства по авт. св. № 1130493.
Целью изобретения является повышение производительности устройства за счет возможности обеспечения его ритмичной работы.
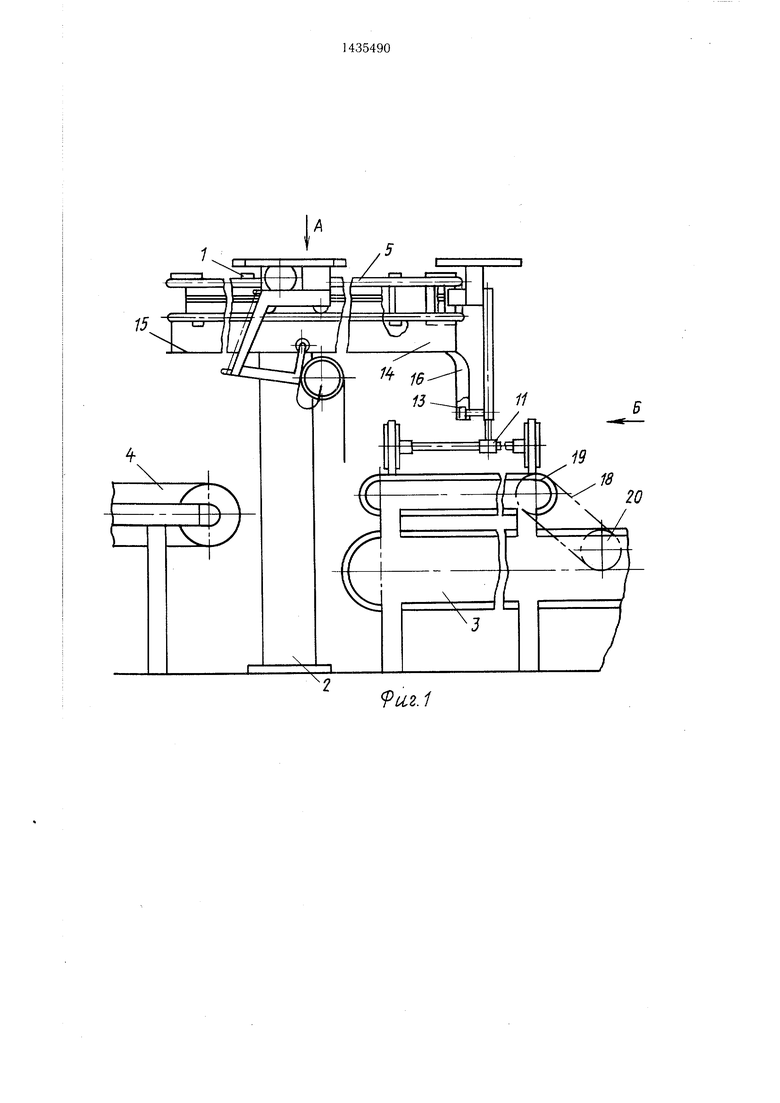
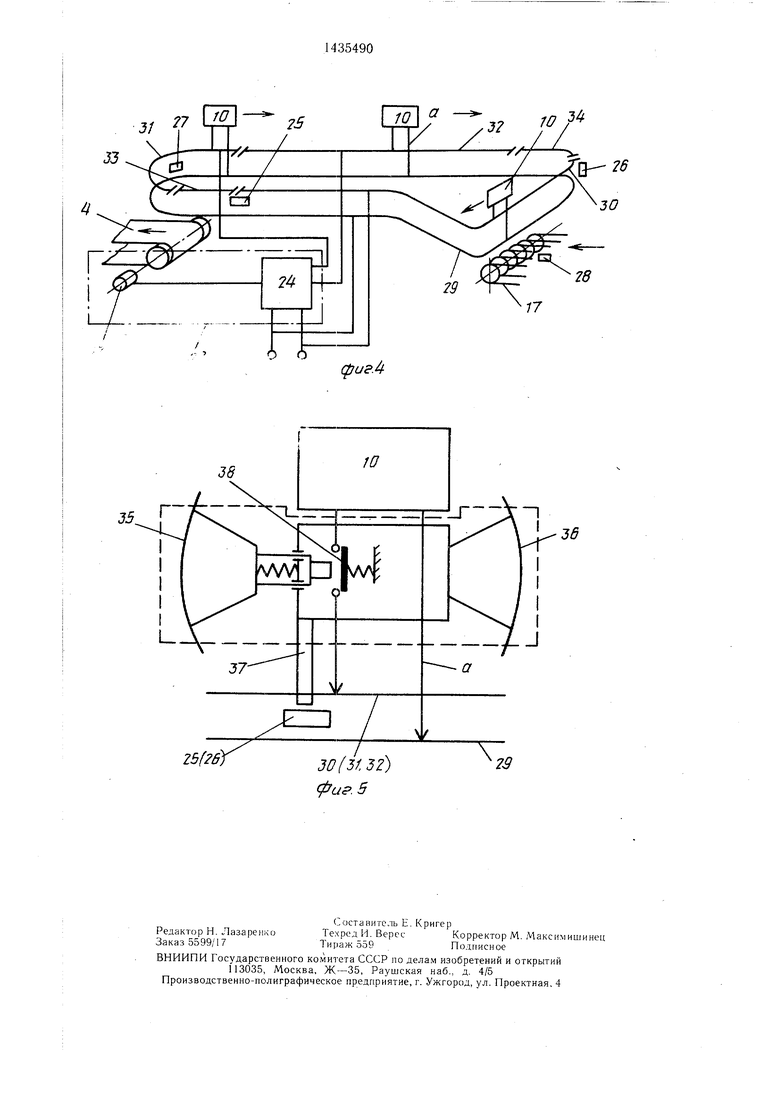
На фиг. 1 изображено устройство, обш,ий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - вид Б на фиг. 1; на фиг. 4 - схема электри- 1ческой связи; на фиг. 5 - схема механизма |для перемеш.ения каретки.
Устройство содержит рамную конструкцию 1; установленную на основании 2, положенном между соосно смонтированными питающим транспортером 3, например, транспортером диагонально-резательной машины, и отборочным транспортером 4, например, транспортером стыковочного средства.
На раме 1 закреплены криволинейные направляюш.ие 5 в виде равных треуголь- никор с закругленными углами, расположенных один над другим и имеюш,иХ соответственно стороны 6-8.
На направляющих 5 установлены подвижные каретки 9, снабженные индивидуальными механизмами 10 для их перемеш,ения, содержащие электродвигатели, обеспечивающие плавное изменение частоты вращения вала, например двигатели постоянного тока, редукторы (условно не показаны) и токо10
15
20
25
Троллеи 30 и 32 содержат секции 33 и 34, расположенные между сторонами 6 и 7, 8 и 6.
Датчики 25 и 26 предназначены для управления секциями 33 и 34 троллеев 30 и 32 и установлены около секций 33 и 34.
Датчик 27 предназначен для регистрации отпускания полос корда и управления датчиком 25, а датчик 28 - для управления механизмом 17 отбора и датчиком 26.
Источник сигналов может быть в виде тахогенератора, а усилитель 24 сигналов имеет прямой выход для соединения с троллеем 31 и инверсный для соединения с троллеем 32. Троллеи 29 и 30 соединены с источником питающего напряжения, неизменного по величине.
Механизм 10 для перемещения каретки 9 снабжен подпружиненным относительно нее ограничителем 35 и жестко связанным с ней дополнительным ограничителем 36 перемещения. На каретке 9 смонтирован палец 37. Механизм 10 имеет выключатель 38.
Устройство работает следующим образом.
Включаются транспортеры 3 и 4, механизмы 10 для перемещения кареток 9, и через передачу 21 приводится в движение механизм 17 отбора.
Отрезанная полоса корда поступает с питающего транспортера 3 на механизм 17 отбора через транспортерные ленты 18, соесъемники а. На каретках 9 смонтированыдиняющие шкивы 19 и 20, достигает датГ1 П D 1Л Sjy TJLIO OOVQOT LI 1 1 OOVDriT-LiriO li rntJUTTi-J n. ,
подвижные захваты 11 с захватывающими элементами 12 и роликами 13.
На раме 1 закреплен копир 14 в виде замкнутого профиля, совпадающего в плане с профилем направляющих 5 и имеющего плоский 15 и криволинейный 16 участки.
Питающий транспортер 3 снабжен механизмом 17 отбора в виде ..транспортера, расположенного под криволинейным участ- i ком 16 копира 14 и кинематически свя- занного с транспортером 3 посредством уз- I ких транспортерных лент 18, шкивов 19 и 20 :и передачи 21, причем механизм 17 отбора может быть остановлен независимо от : тающего транспортера 3.
Стороны 7 и 8 направляющих 5 электрически связаны с приводом отборочного транспортера (не показан).
чика 28, после срабатывания которого механизм отбора отключается, а датчик 26 обеспечивает подключение секции 34 к троллею 32 соединенному с источником энергии через усилитель 24 сигналов. Подвижные карет35 ки 9 с захватами 11 перемещаются посредством их механизмов 10 по направляющим 5 последовательно по их сторонам 6-8, ролики 13 взаимодействуют с плоским 15 и криволинейным 16 участками копира 14. При прохождении каретками 9 стороны 6
- ролики 13 взаимодействуют с криволинейным участком 16 копира 14, захватывающие элементы 12 захвата 11 касаются полосы корда и захватывают ее. Захват 11 поднимает полосу корда над механизмом 17 отбора
45 за счет взаимодействия ролика 13 с криволинейным участком 16 копира 14, а механизм отбора включается датчиком 28, регистрирующим отбор полосы корда.
Кинематическая связь кареток 9 между собой выполнена в виде установленного на направляющих 5 троллейного токоподвода. Электрическая связь выполнена в виде фор- 50 мирователя 22 сигналов с источником 23 сигналов и усилителем 24 и датчиков 25-28.
Троллейный токоподвод содержит троллеи 29-32, которые расположены на изоляторах на направляющих 5, причем трол45 за счет взаимодействия ролика 13 с криволинейным участком 16 копира 14, а механизм отбора включается датчиком 28, регистрирующим отбор полосы корда.
При переходе первой после включения устройства каретки 9 со стороны 6 на сторону 7 направляющих 5 датчик 25 заблокирован, секция 33 подключена к троллею 30 и находится под напряжение.м, поэтому каретка 9 движется без остановок по стороне 7 к позиции укладки полосы корда при взаимодействии ролика 13 с плоским участлей 29 установлен вдоль сторон 6-8 и яв- 55 ком 15 копира 14. После перехода каретки 9 ляется общей шиной питания механизмов 10,на сторону 7 ее привод получает энергию от
29 и 31
троллеи 30-32 установлены параллельно троллею 29 соответственно на сторонах 6-8.
троллеев z9 и 31 посредством токосъемников а. Следующая каретка 9 с захвачен0
5
0
5
Троллеи 30 и 32 содержат секции 33 и 34, расположенные между сторонами 6 и 7, 8 и 6.
Датчики 25 и 26 предназначены для управления секциями 33 и 34 троллеев 30 и 32 и установлены около секций 33 и 34.
Датчик 27 предназначен для регистрации отпускания полос корда и управления датчиком 25, а датчик 28 - для управления механизмом 17 отбора и датчиком 26.
Источник сигналов может быть в виде тахогенератора, а усилитель 24 сигналов имеет прямой выход для соединения с троллеем 31 и инверсный для соединения с троллеем 32. Троллеи 29 и 30 соединены с источником питающего напряжения, неизменного по величине.
Механизм 10 для перемещения каретки 9 снабжен подпружиненным относительно нее ограничителем 35 и жестко связанным с ней дополнительным ограничителем 36 перемещения. На каретке 9 смонтирован палец 37. Механизм 10 имеет выключатель 38.
Устройство работает следующим образом.
Включаются транспортеры 3 и 4, механизмы 10 для перемещения кареток 9, и через передачу 21 приводится в движение механизм 17 отбора.
Отрезанная полоса корда поступает с питающего транспортера 3 на механизм 17 отбора через транспортерные ленты 18, соединяющие шкивы 19 и 20, достигает датn. ,
чика 28, после срабатывания которого механизм отбора отключается, а датчик 26 обеспечивает подключение секции 34 к троллею 32 соединенному с источником энергии через усилитель 24 сигналов. Подвижные каретки 9 с захватами 11 перемещаются посредством их механизмов 10 по направляющим 5 последовательно по их сторонам 6-8, ролики 13 взаимодействуют с плоским 15 и криволинейным 16 участками копира 14. При прохождении каретками 9 стороны 6
ролики 13 взаимодействуют с криволинейным участком 16 копира 14, захватывающие элементы 12 захвата 11 касаются полосы корда и захватывают ее. Захват 11 поднимает полосу корда над механизмом 17 отбора
за счет взаимодействия ролика 13 с криволинейным участком 16 копира 14, а механизм отбора включается датчиком 28, реистрирующим отбор полосы корда.
При переходе первой после включения устройства каретки 9 со стороны 6 на сторону 7 направляющих 5 датчик 25 заблокирован, секция 33 подключена к троллею 30 и находится под напряжение.м, поэтому каретка 9 движется без остановок по стороне 7 к позиции укладки полосы корда при взаимодействии ролика 13 с плоским участком 15 копира 14. После перехода каретки 9 на сторону 7 ее привод получает энергию от
29 и 31
троллеев z9 и 31 посредством токосъемников а. Следующая каретка 9 с захваченной полосой корда, получающая энергию от троллеев 29 и 30, после входа на секцию 33 останавливается в результате взаимодействия пальца 37 с датчиком 25, последующего отключения секции 33 и механизма 10 от источника энергии. При подходе каждой следующей каретки 9 до контакта с впереди стоящей кареткой 9 подпружиненный ограничитель 35 перемещения движущейся каретки смещается и нажимает на выключаусилителя 24, формирователь сигналов 22 устанавливает напряжения на троллеях 31 и 32 так, что на стороне 7 скорость движения кареток 9 изменяется прямо пропорционально скорости транспортера 4, а на стороне 8 - обратно пропорционально. Скорость движения кареток на стороне 6 неизменна, что необходимо для обеспечения надежности захвата полос корда. Указанные меры по регулированию скоростей движения кареток
тель 38. Механизм 10 отключается и карет-Ю на участках 7 и 8 позволяют достичь ритка 9 останавливается. Таким образом, воз-мичности работы устройства, так как сумможна остановка последовательно несколь-марное время обхода каретками направляюких кареток.щих остается неизменным, вне зависимости
После укладки полосы корда впереди иду-от постоянства или изменения скорости
щей кареткой 9 датчик 27 подает сигнал нал с транспортера 4, а также исключаются дополнительные остановки устройства.
датчик 25, подключающий секцию 33 к троллею 30. Привод каретки, находящейся на секции 33, получает энергию от троллеев 29 и 30, и каретка движется к стороне 7, к позиции укладки полосы. При наличии нескольФормула изобретения
1. Устройство для отбора и перекладки ких неподвижных кареток 9, оставшиеся приб 20 полос обрезиненного корда по авт. св. лижаются к стороне 7 поочередно, после по-№ 1130493, отличающееся тем, что, с целью
дачи сигнала датчиком 27 на датчик 25. Если секция 33 уже подключена к троллею 30 датчиком 25 к моменту подхода очередной каповышения производительности устройства за счет возможности обеспечения его ритмичной работы, привод для перемещения
ретки 9 к границе сторон 6 и 7, то ее при- подвижных кареток выполнен в виде инди- вод не отключается и движение не лреры-видуальных механизмов для перемещения
вается. Переход кареток 9 со стороны 8 накареток, каждый из которых соединен со
сторону 6 осуществляется следующим об-своей кареткой, кинематическая связь кареразом,ток между собой выполнена в виде установленного на направляющих троллейного При поступлении полосы корда на меха- ЗО токоподвода, а две стороны направляющих
низм 17 отбора он отключается датчиком 28, от сигнала последнего датчик 26 подключает секцию 34 к троллею 32, каретка движется к стороне 6 для захвата и съема полосы корда, после прохождения секции 34 отключает ее, воздействуя пальцем 37 на дат- 35 чик 26; следующая каретка останавливается на секции 34. При съеме полосы корда механизм 17 отбора включается датчиком 28 и т. д.
Кроме того, необходимо регулировать скорость движения кареток на сторонах 7 и 8, т. е. при изменении скорости транспортера 4, создании и образовании сигнала об этом посредством источника 23 сигналов и
40
электрически связаны с приводом отборочного транспортера.
2.Устройство по п. 1, отличающееся тем, что электрическая связь выполнена в виде формирователя сигналов с источником сигналов и усилителем и датчиков управления механизмами для перемещения кареток.
3.Устройство по п. 1, отличающееся тем. что механизм для перемещения каретки снабжен подпружиненным относительно нее ограничителем перемещения, жестко связанным с ней дополнительным ограничителем перемещения и смонтированным на каретке пальцем для взаимодействия с датчиками.
усилителя 24, формирователь сигналов 22 устанавливает напряжения на троллеях 31 и 32 так, что на стороне 7 скорость движения кареток 9 изменяется прямо пропорционально скорости транспортера 4, а на стороне 8 - обратно пропорционально. Скорость движения кареток на стороне 6 неизменна, что необходимо для обеспечения надежности захвата полос корда. Указанные меры по регулированию скоростей движения кареток
на участках 7 и 8 позволяют достичь ритФормула изобретения
новленного на направляющих троллейного токоподвода, а две стороны направляющих
электрически связаны с приводом отборочного транспортера.
2.Устройство по п. 1, отличающееся тем, что электрическая связь выполнена в виде формирователя сигналов с источником сигналов и усилителем и датчиков управления механизмами для перемещения кареток.
3.Устройство по п. 1, отличающееся тем. что механизм для перемещения каретки снабжен подпружиненным относительно нее ограничителем перемещения, жестко связанным с ней дополнительным ограничителем перемещения и смонтированным на каретке пальцем для взаимодействия с датчиками.
15
9U2.1
35
10
ВидВ
36
/I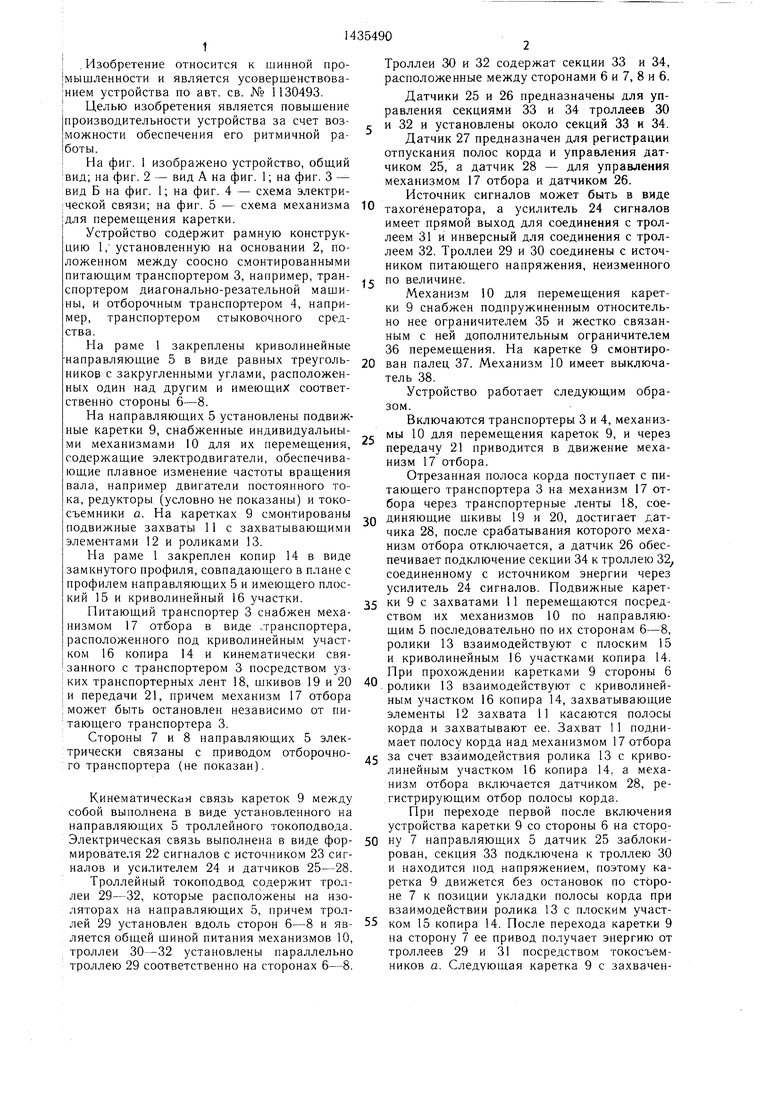
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для отбора и перекладки полос обрезиненного корда | 1982 |
|
SU1130493A1 |
| УСТРОЙСТВО для ПЕРЕКЛАДКИ И СТЫКОВКИ | 1973 |
|
SU374200A1 |
| Устройство для стыковки обрезиненного корда | 1988 |
|
SU1643179A1 |
| Агрегат для раскроя и стыковки корда | 1982 |
|
SU1065240A1 |
| Система для распределения грузов по местам назначения | 1982 |
|
SU1131791A1 |
| Устройство для перекладки и стыковки полосового материала | 1989 |
|
SU1705121A1 |
| ПОЖАРОВЗРЫВОЗАЩИЩЕННОЕ ТОКОСЪЕМНОЕ УСТРОЙСТВО ТРОЛЛЕЙНОЙ СИСТЕМЫ ЭЛЕКТРОПИТАНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2012 |
|
RU2533375C2 |
| Агрегат для раскроя и стыковки полосового материала | 1985 |
|
SU1570930A1 |
| Устройство для снятия с подвесного пути туш животных | 1972 |
|
SU558829A1 |
| Устройство для управления грузоносителем | 1990 |
|
SU1787899A1 |
Изобретение относится к шинной промышленности и может быть использовано для отбора и перекладки полос обрезинен- ного корда. Цель изобретения - повышение производительности устройства за счет обеспечения ритмичной работы устройства. Для этого привод для перемещения подвижных кареток (К) 9 выполнен в виде индивидуальных механизмов 10 для перемещения К 9, каждый из которых соединен со своей К 9. Кинематическая связь К 9 между собой выполнена в виде установленного на направляющих 5 троллейного токоподвода. Две стороны нанрав 1яющих 5 электрически связаны с приводом отборочного транспортера 17. Электрическая связь выполнена ь виде формирователя сигна. юв с источником сигналов и с усилителем и датчиков управления механизмами для перемещения К 9. Механизм для перемещения К 9 снабжен подпружиненным относительно К 9 ограничителем 35 перемещения, жестко связанным с К 9 дополнительным ограничителем 36 перемещения и смонтированным на К 9 пальцем для взанмодействия с датчиками 25, 26. 2 3. п. ф-лы, 5 ил. дид и noSepffjjfno О (Л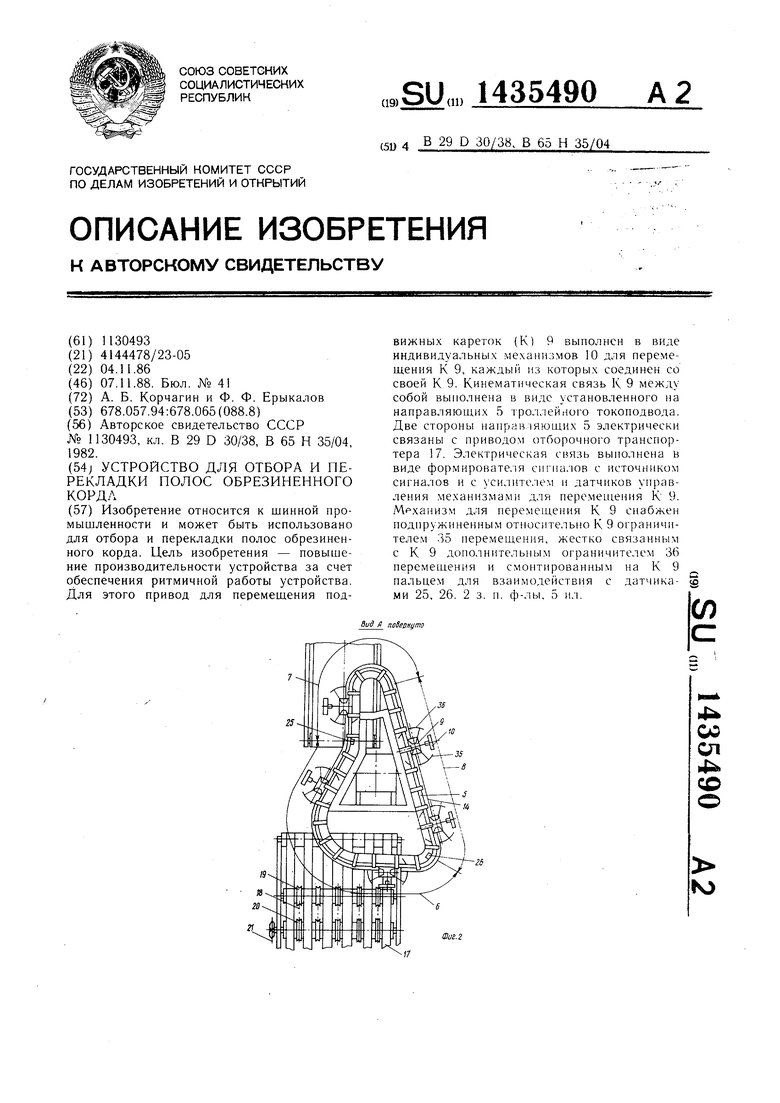
9U2.3
J/
JJ
О О
фигЛ
Z5f26Y
30{3f.3Z} фа. 5
28
| Устройство для отбора и перекладки полос обрезиненного корда | 1982 |
|
SU1130493A1 |
| Солесос | 1922 |
|
SU29A1 |
