исЛ-i - интервалы времени от момента поступления на машину сигнала основного источника электромагнитных колебаний до моментов поступления на нее сигналов соответственно первого и второго источников звуковых колебаний;
X - расстояние от центра отрезка, соединяющего заданные точки, до плоскости, в которой находится заданная траектория движения. 3. Способ по п. 1, отличающийся TeMj, что все упомянутые источники колебаний испускают Ч:игналы различной частоты.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ГРУППОВОГО ВОЖДЕНИЯ ДОРОЖНЫХ ДРОНОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2662297C1 |
| СПОСОБ ИССЛЕДОВАНИЯ ПЕРВИЧНЫХ ГИДРОАКУСТИЧЕСКИХ ПОЛЕЙ ШУМЯЩЕГО ОБЪЕКТА | 2006 |
|
RU2329474C2 |
| СПОСОБ ИЗМЕРЕНИЯ ГЛУБИН И ЭХОЛОТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2614854C2 |
| СПОСОБ АЗИМУТАЛЬНОЙ АКУСТИЧЕСКОЙ КОРРЕКЦИИ ИНКЛИНОМЕТРА | 2015 |
|
RU2619563C2 |
| СПОСОБ ИЗМЕРЕНИЯ ГЛУБИН И ЭХОЛОТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2431154C1 |
| СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 1996 |
|
RU2109319C1 |
| СИСТЕМА УПРАВЛЕНИЯ КЛАПАНАМИ ДВИГАТЕЛЯ | 2000 |
|
RU2175071C1 |
| СПОСОБ И СИСТЕМА ОТСЛЕЖИВАНИЯ ТРАЕКТОРИИ ДВИЖЕНИЯ ВНУТРИТРУБНОГО СНАРЯДА | 2013 |
|
RU2574698C2 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ И УСТРОЙСТВО ДЛЯ ЭТОГО (ВАРИАНТЫ) | 2008 |
|
RU2481554C2 |
| СПОСОБ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ ПРИ ПОИСКЕ УГЛЕВОДОРОДОВ И СПОСОБ ОПРЕДЕЛЕНИЯ ЗАЛЕГАНИЯ ПРОДУКТИВНЫХ НА УГЛЕВОДОРОДЫ ПЛАСТОВ И СЕЙСМИЧЕСКАЯ СТАНЦИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2433425C2 |
1. СПОСОБ УПРАВЛЕНИЯ КУРСОМ ДВИЖЕНИЯ МАШИНЫ, включающий определение расстояния от машины до двух заданньк точек с использованием электромагнитных сигналов, отличающ и и с я тем, что, с целью повыг шения точности управления, основным источником электромагнитных колебаний возбуждают периодически два источника звуковых, преимущественно ультразвуковых колебаний, установленные в заданных точках, на машине принимают сигналы основного источника электромагнитных колебаний и обоих источников звуковых колебаний, сигнал одного из которых принимают также дополнительным приемником звуковых сигналов, удаленным на известное расстояние от одного из источников звуковых колебаний и совмещенным с дополнительным источником злектромагнитных колебаний, сигналы которого принимают на нашине, определяют интервалы времени от момента поступления на машину сигнала основного сеточника электромагнитных колебаний до моментов поступления на нее сигналов первого и второго источников звуковых колебаний и сигнала дополнительного источника длектромагнитньгх колебаний, вычисляют скорость звукаУ по формуле v 4 utf) где .f- известное расстояние от соответствующего источника до дополнительного приемника звуковых колебаний; интервал времени от момента поступления на машину сигнала основного источника эле1 тромагнитных колебаний до момента поступления на нее сигнала дополнительного источника электромагнитных колебаний. 2. Способ по п, 1, о т лич а ющ и и с я тем, что, с целью обеспечения движения машины по траекториям в параллельных плоскостях и упрощения выработки сигнала рассогласования, источники звуковых сигналов устанавливают вдоль пряоэ мой, перпендикулярной плоскостям, в которых находятся заданные траектории движения машин, а в систему 00 автоматического управления курсом движения машины в зависимости от расположения траектории движения относительно заданных точек подают сигналы рассогласования 3, равные .X 74VAt,f-{V J-2fx или J--(V.t3f-№t,, - расстояние мёЗкду двумя где заданными точками, где установлены источники колебаний;
Изобретение относится к автомати зации вождения самоходных машин и может быть использовано для группового вождения сельскохозяйственных и строительных машин и агрегатов по параллельным траекториям. Известен способ автовождения сельскохозяйственных агрегатов путем возбуждения электромагнитных полей перемещающихся в пространстве стоячих волн между, базовыми антенн ми и антенной на машинно-тракторном агрегате 1 . Для реализации данного, способа на подвижной машине и базовых станциях необходимо иметь антенну с узкой диаграммой направленности, что оп1 еделяет высокую сложность устройства. Известен также способ управления курсом вождения машин, включающий определение расстояния от машины до двух заданных точек с использованием электромагнитных си налов 2 . Недостатком данного устройства является низкая точность управления при движении машины по неровной поверхности. Цель изобретения - повьшение точ ности управления. Указанная цель достигается тем. что согласно способу управления кур сом движения машины, включгиощёму о ределение расстояния от машины до двух заданных точек с использованием электромагнитных сигналов основным источником электромагнитных колебаний возбуждают цериодиче ки два источника звуковых, преимущественно ультразвуковых колебаний, установленные в заданных точках, на машине принртмают сигналы основного источника электромагнитных колебаний и обоих источников звуковых колебаний, сигнал одного из которых принимают также дополнительным приемником звуковых сигналов, удаленным на известное расстояние от одного из источников звуковых колебаний и совмещенным с дополнительным источником эле тромагнитных колебаний, сигналы которого принимают на машине, определяют интервалы времени от момента поступления на машину сигнала основного источника электромагнитных колебаний до моментов поступления на нее сигналов первого и второго источников звуковых колебаЛИй и сигнала дополнительного источника электромагнитных колебаний, вычисляют скорость звука V по фор- . Муле v-fe Я известное расстояние от соответствующего источника до дополнительного приемника звуковых колебаний;Дм интервал времени от момента поступления на машину сигнала основного источ ника электромагнитных колебаний до момента поступления на нее сигнала дополнительного источника электромагнитных колебаний.
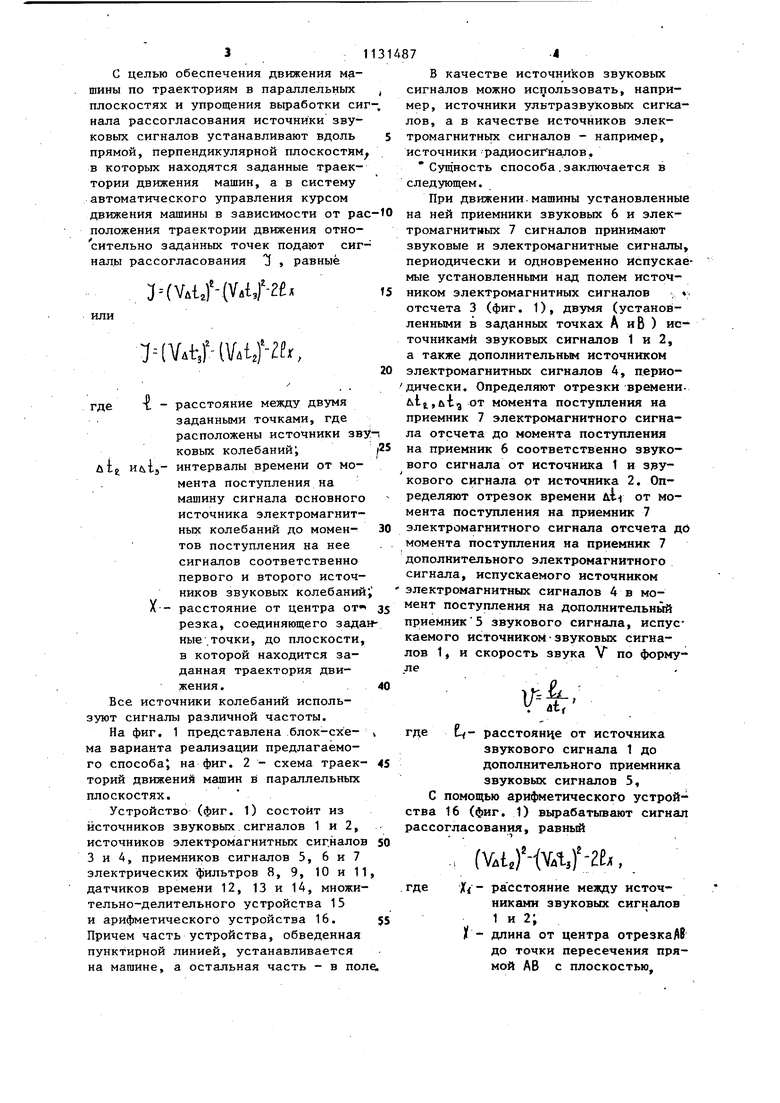
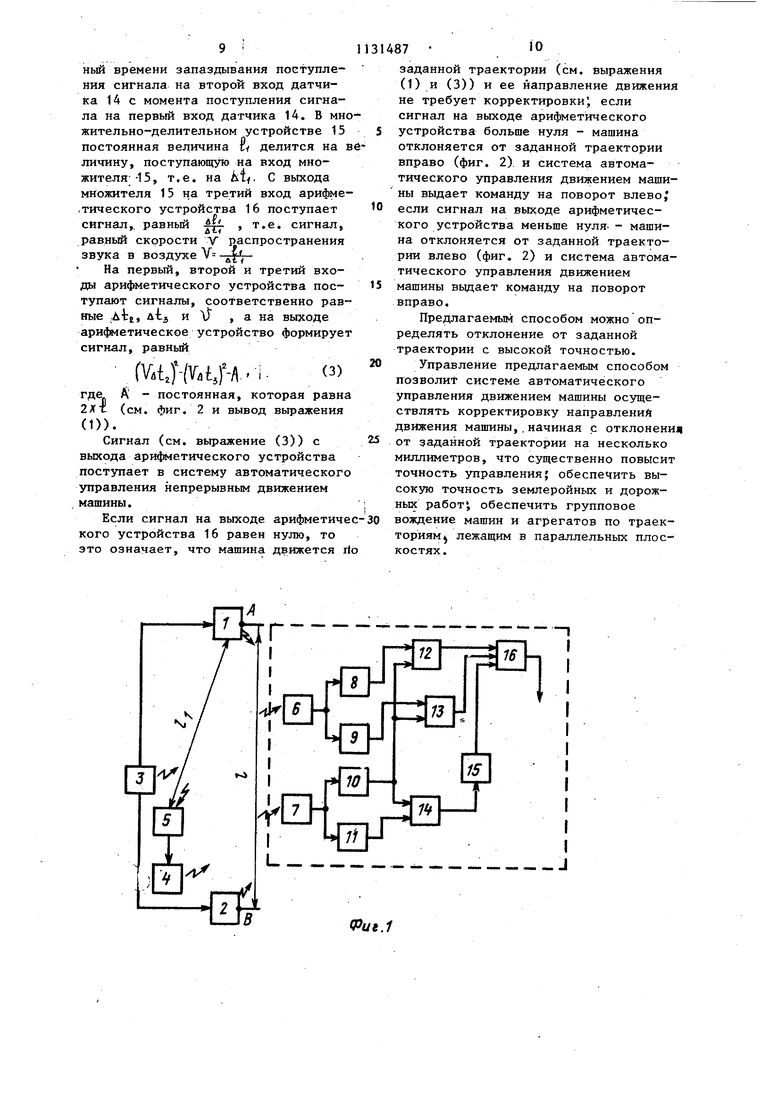
С целью обеспечения движения машины по траекториям в параллельных , плоскостях и упрощения выработки сигнала рассогласования источники звуковых сигналов устанавливают вдоль ; прямой, перпендикулярной плоскостям в которых находятся заданные траектории движения машин, а в систему автоматического управления курсом движения машины в зависимости от рас-О положения траектории движения отно- сительно заданных точек подают сигналы рассогласования 3 , равные (VAtJ-(VAi3f-2fix J4YAtf-№t, - - расстояние между двумя заданными точками, где расположены источники зву-i ковых колебаний; /25 utg H&tj- интервалы времени от момента поступления на машину сигнала основного источника электромагнитных колебаний до моментов поступления на нее сигналов соответственно первого и второго источников звуковых колебаний; X - расстояние от центра от« 35 резка, соединяющего заданные, точки, до плоскости, в которой находится заданная траектория движения,.40 Все источники колебаний используют сигналы различной частоты. На фиг. 1 представлена блок-схе- ма варианта реализации предлагаемого способа на фиг. 2 - схема траек- 45 торий движений машин в параллельных плоскостях. Устройство (фиг. 1) состоит из источников звуковых сигналов 1 и 2, источников электромагнитных сиг.налов 50 3 и 4, приемников сигналов 5, 6 и 7 электрических фильтров 8, 9, 10 и 11, датчиков времени 12, 13 и 14, множи- .гд тельно-делительного устройства 15 и арифметического устройства 16. 55 Причем часть устройства, обведенная пунктирной линией, устанавливается на машине, а остальная часть - в поле.
В качестве источников звуковых сигналов можно использовать, например, источники ультразвуковых сигналов, а в качестве источников электромагнитньк сигналов - например, источники радиосигналов,
Сущность способа .заключается в следующем.
При движении.машины установленные 15 20 пр ка ло ле ст ра на ней приемники звуковых 6 и электромагнитных 7 сигналов принимают звуковые и электромагнитные сигналы, периодически и одновременно испускаемые установленными над полем источНИКОМ электромагнитных сигналов «. отсчета 3 (фиг. 1), двумя (установленными в заданных точках А иВ ) источниками звуковьрс сигналов 1 и 2, а также дополнительным источником электромагнитных сигналов 4, п.ерио- дически. Определяют отрезки времени&t(,,ui5 от момента поступления на приемник 7 электромагнитного сигнала отсчета до момента поступления на приемник 6 соответственно звукового сигнала от источника 1 и зрукового сигнала от источника 2. Определяют отрезок времени й.i от момента поступления на приемник 7 электромагнитного сигнала отсчета дО момента поступления на приемник 7 дополнительного электромагнитного сигнала, испускаемого источником электромагнитных сигналов 4 в поступления на дополнительный 5 звукового сигнала, испусисточникомзвуковых сигнаскорость звука Г по форму г. V /it/ - расстояние от источника звукового сигнала 1 до дополнительного приемника звуковых сигналов 5, ощью арифметического устрой(фиг. 1) вырабатывают сигнал сования, равный (Ул12))-2ел, t - расстояние между источниками звуковых сигналов 1 и 2; - длина от центра отрезкаАВ до точки пересечения прямой АВ с плоскостью.
в которой находится заданная траектория днижения (фиг. 2).
Вьгоаботанный сигнал рассогласования (Vutjf-(Тд 1з)2fл подают в систему управления направлением движения машины.
Периодическое определение скорости звука в процессе управления предлагаемым способом позволяет исключить влияние параметров окружающей среды, например температуры, на точность управления.
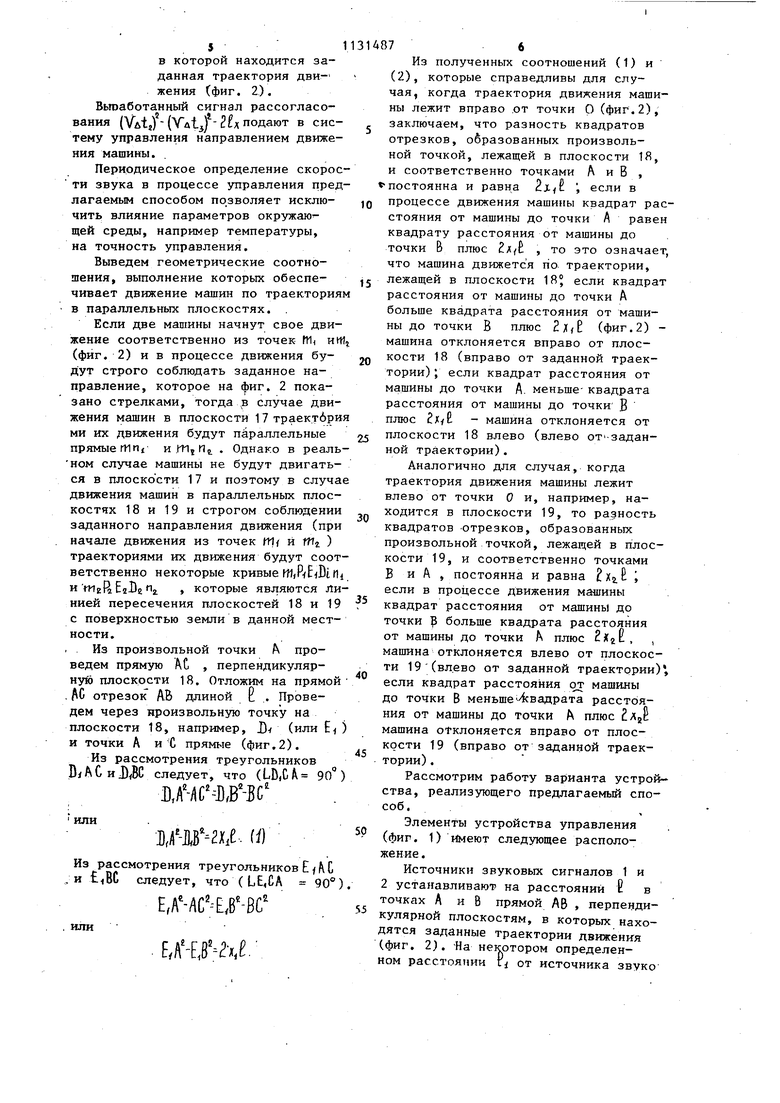
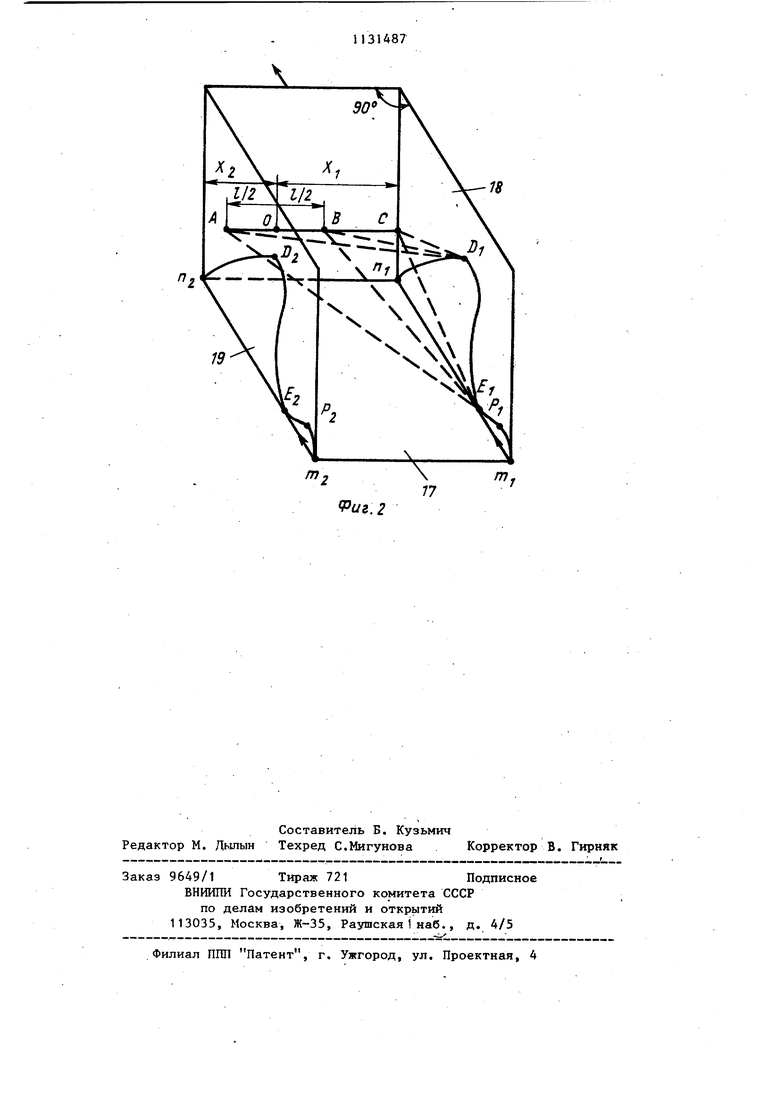
Выведем геометрические соотношения, выполнение которых обеспечивает движение машин по траекториям в параллельных плоскостях.
Если две машины начнут свое движение соответственно из точек Y иШ (фиг. 2) и в процессе движения будут строго соблюдать заданное направление, которое на Лиг. 2 показано стрелками, тогда в случае движения машин в плоскости 1 7 траектбрия ми их движения будут параллельные прямые mnj . . Однако в реальном случае машины не будут двигаться в плоскости 17 и поэтому в случае движения машин в параллельных плоскостях 18 и 19 и строгом соблюдении заданного направления движения (при начале движения из точек И1 и fTij ) траекториями их движения будут соответственно некоторые кривые ltl,. Hi которые являются Линией пересечения плоскостей 18 и 19 с поверхностью земли в данной местности.
. Из произвольной точки Л проведем прямую АС , перпендикулярную плоскости 18. Отложим на прямой АС отрезок АВ длиной . Проведем через произвольную точку на плоскости 18, например, D (или E) и точки А и С прямые (фиг.2).
Из рассмотрения треугольников В/АСиЛ) следует, что (LD,CA
90)
аА-ЛС БЙС
или
1),,е. (f)
Из рассмотрения треугольников Е АС и iBC следует, что ( LE,CA 90°),
Е,А-АСЧ/-ВС
-г
или
Из полученных соотношений (1) и (2), которые справедливы для случая, когда траектория движения машины лежит вправо .от точки О (фиг. 2), заключаем, что разность квадратов отрезков, образованных произвольной точкой, лежащей в плоскости 18, и соответственно точками А и В , постоянна и равна 2лД , если в процессе движения машины квадрат расстояния от машины до точки А равен квадрату расстояния от машины до точки В плюс , то это означает, что машина движется по траектории, лежащей в плоскости 18° если квадрат расстояния от машины до точки А больше квадрата расстояния от машины до точки В плюс 2XfE (фиг.2) машина отклоняется вправо от плоскости 18 (вправо от заданной траектории) ; если квадрат расстояния от машины до точки А. меньше- квадрата расстояния от машины до точки Б плюс Xffi - машина отклоняется от плоскости 18 влево (влево от-заданной траектории).
Аналогично для случая, когда траектория движения машины лежит влево от точки О и, например, находится в плоскости 19, то разность квадратов -отрезков, образованных произвольной точкой, лежащей в плоскости 19, и соответственно точками В и А , постоянна и равна Хг. i если в процессе движения машины квадрат расстояния от машины до точки р больше квадрата расстояния от машины до точки А плюс 2 Хг 1- , , машина отклоняется влево от плоскости 19(влево от заданной траектории), если квадрат расстояния от машины до точки В меньшеКвадрата расстояния от машины до точки А плюс машина otклoняeтcя вправо от плоскости 19 (вправо от заданной траектории) .
Рассмотрим работу варианта устройства, реализующего предлагаемый способ.
Элементы устройства управления (фиг. 1) имеют следующее расположение .
Источники звуковых сигналов 1 и 2 устанавливают на расстояний Ё в точках А и В прямой АВ , перпендикулярной плоскостям, в которых нахоятся заданные траектории движения (фиг. 2). -На некотором определеном расстоянии li от источника звуко 7 - . вых сигналов 1 устанавливают прием ник звуковых сигналов 5. Причем источники звуковых сигналов 1 и 2, источники электромагнитных сигналов 3 и 4 и приемник звуковых сигна лов 5 (фиг.1) устанавливают в поле. Приемники сигналов 6 и 7, электр ческие фильтры 8, 9, 10 и 11 датчики времени 12, 13 и 14 множитель но-делительное устройство 15 и ариф метическое устройство 16 устанавливают на машине, В процессе работы устройства (фиг. 1) происходит следующее. Источник электромагнитных сигналов отсчета 3, источник дополнитель ных электромагнитных сигналив 5 и источники звуковых сигналов 1 и 2 периодически посылают кратковременные электромагнитные и звуковые сигналы различной частоты. Причем кратковременная посылка этих сигналов происходит следующим образом. Одновременно запускаются источники электромагнитных сигналов отсчета 3 и источники звуковых сигналов 1 и 2 В момент времени, когда на приемник 5 поступает звуковой сигнал от источника 1, с выхода приемника 5 на дополнительный источник электромагнитных сигналов 4 поступает сигнал, запускающий источник электромагнитных сигналов. Электромагнитный сигнал отсчета, посьтаемьй источником 3, практическ мгновенно (из-за большой скорости распространения электромагнитных сигналов) попадает на приемник 7, а звуковые сигналы, посылаемые соот ветственно источниками 1 и 2 попадают на приемник 6 с временами запа дывания, равными utj и atj с момен та поступления на приемник 7 электромагнитного сигнала отсчета. Прич fitg- время, в течение которого зву ковой сигнал проходит расстояние от источника 1 до приемника 6 (от источника 1 до управляемой машины), autg время, в течение которого звуковой сигнал проходит расстояние от источника 2 до приемника 6 (от источника 2 до управляемой машины) , так как электромагнитный сигнал (импульс) отсчета и звуковые сигналы (импульсы) посьшаются источ никами 3,1 и 2 одновременно. Дополнительный электромагнитный сигнал., посылаемый источником. 4, поступает на приемник 7 с некоторым 878- временем запаздываний at,с момента Поступления на приемник 7 электромагнитного сигнала отсчета. Причем utt время в течение которого звуковой сигнал, посылаемый источником 1, проходит расстояние tt , так как источник 4 запускается в момент попадания на приемник 5 звукового сигнала от источника 1. Фильтры 8 и 9 производят разделение сигналов, -которые формируются на выходе приемника 6 при поступлении на приемник 6 соответственно звуковых сигналов от источников 1 и 2 звуковых сигналов. Фильтры 10 и И производят разделение сигналов, которые фбрмируются на выходе приемника 7 при поступлении на приемник 7 соответственно электромагнитных сигналов отсчета от источника 3 и дополнительных электромагнитньпс сигналов от источника 4. При поступлении на приемник 7 электромагнитного сигнала отсчета с выхода приемника 7 через фильтр 10 на первые входы датчиков времени 12, 13 и 14 поступает сигнал. При пост5ттлении на приемник 7 дополнительного электромагнитного сигнала с выхода приемника 7 через фильтр 11 на второй вход датчика вре мени 14 постзттает сигнал. При поступлении на приемник 6 звукового сигнала от источника 1 с выхода приемника 6 через фильтр 8 на второй вход датчика времени 12 поступает сигнал. При поступлении на приемник 6 звукового сигнала от источника 2 с выхода приемника 6 через фильтр 9 на второй вход датчика времени 13 поступает сигнал. С выхода датчика времени 12 на первый вход арифметического устройства 16 поступает сигнал uta ,равньА времени запаздывания поступления сигнала на второй вход датчика 12 с момента поступления сигнала на первый вход датчика 12. С выхода датчика времени 13 на второй вход арифметического устройства 16 поступает сигнал u-i-g равный времени запаздывания поступления сигнала на второй вход датчика 13 с момента поступления сигна ла на первый вход датчика 13. С выхода датчика времени 14 на множительно-делительное устройство 15 поступает сигнал ЛТд, рав9 i ный времени запаздывания поступления сигнала на второй вход датчика 14 с момента поступления сигнала на первый вход датчика 14. В мно жительно-делительном устройстве 15 постоянная величина li делится на в личину, поступающую на вход множителя -15, т.е. на kii- С выхода множителя 15 на третий вход ,тического устройства 16 поступает сигнал,, равный М , т.е. сигнал, равньй скорости V распространения звука в воздухе V На первый, второй и третий входы арифметического устройства поступают сигналы, соответственно равные ., д-Ьз и А , а на выходе арифметическое устройство формирует сигнал, равньй tJ-(V.t,f-AVi. (3) А - постоянная, которая равна (см. фиг. 2 и вывод выражения Сигнал (см. вьфажение (3)) с выхода арифметического устройства поступает в систему автоматического управления непрерывным движением машины. Если сигнал на выходе арифметиче кого устройства 16 равен нулю, то это означает, что машина движется r 7 . ° заданной траектории (см. выражения (1) и (3)) и ее направление движения не требует корректировки, если сигнал на выходе арифметического устройства больше нуля - машина отклоняется от заданной траектории вправо (фиг. 2). и система автоматического управления движением машины выдает команду на поворот влево если сигнал на выходе арифметического устройства меньше нуля- - машина отклоняется от заданной траектории влево (фиг. 2) и система автоматического управления движением машины выдает команду на поворот вправо. Предлагаемым способом можно определять отклонение от заданной траектории с высокой точностью. Управление предлагаемым способом позволит системе автоматического управления движением машины осуществлять корректировку направлений движения машины,.начиная с отклонении от заданной траектории на несколько миллиметров, что существенно повысит точность управления; обеспечить высокую точность землеройных и дорожных работ, обеспечить групповое вождение машин и агрегатов по траекториям лежащим в параллельных плоскостях.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ автовождения сельскохозяйственных агрегатов | 1977 |
|
SU946426A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР 770444, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
