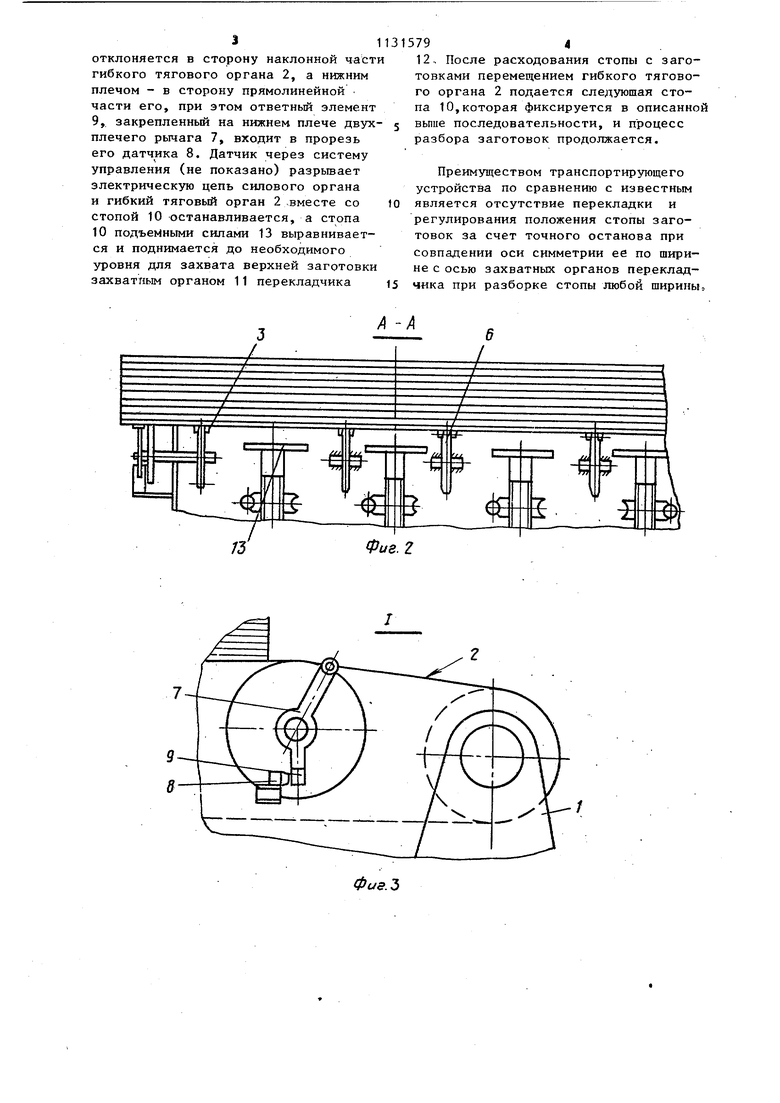
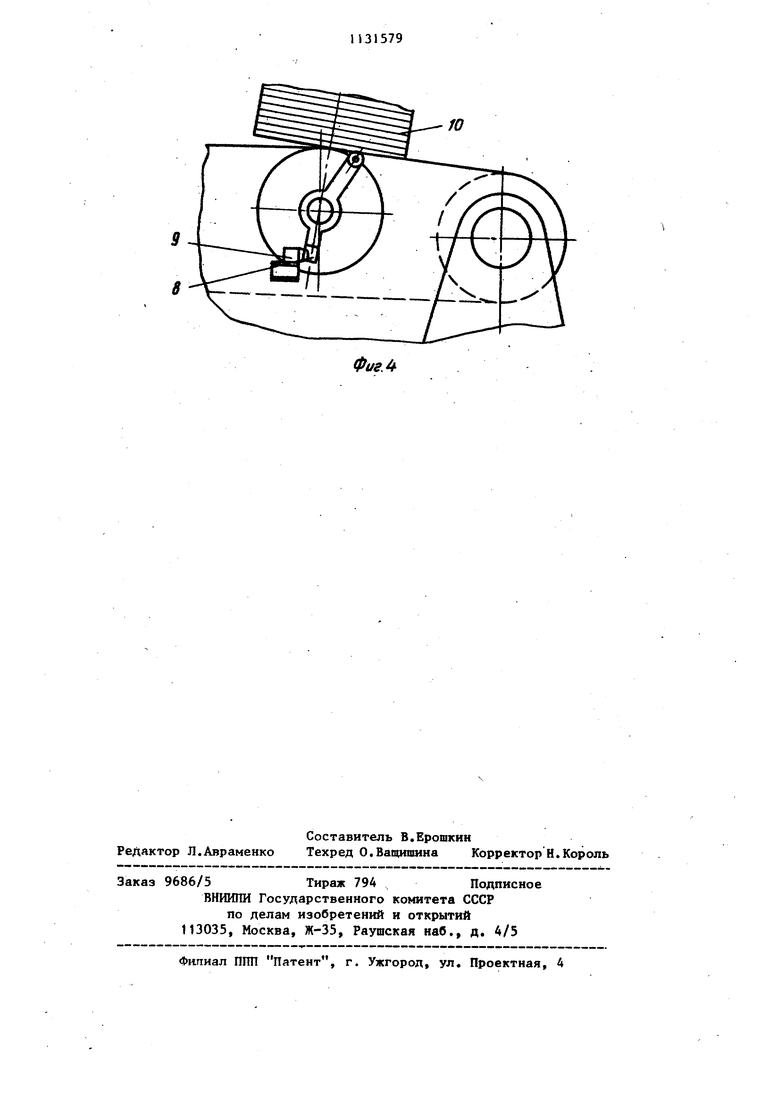
Изобретение относится к обработке металлов давлением и может быть использовано для межоперационного перемещения столов крупногабаритных заготовок и подачи нх в зону обработки, например к прессу. Наиболее близким к предлагаемому по совокупности существенных признаков и достигаемому эффекту является устройство для перемещения заготовок содержащее сонтированные.на станине бесконечной гибкой тяговой орган, охватывающий ведущий от привода и натяжной элементы, механизм остановк заготовок, выполненный в виде поворотного рычага, установленного на оси lj , Недостатком этого устройства явля ется неудобство обслуживания, так как необходимо регулировать упоры при изменении размеров заготовок. Цель изобретения - повышение удоб ства обслуживания и снижения трудоемкости цереналадкИс Поставленная цель достигается тем,ЧТО устройство для перемещения заготовок, содержащее смонтированные на станине бесконечный гибкий тяговай орган, охватывающий ведущий от привода и натяжной элементы, механизм остановки заготовок, выполнен ный в виде поворотного рычага, установленного на оси, снабжено ведомым элементом бесконечного гибкого тягового органа, установленным на оси поворотного рычага с возможностью вращения, со смещением относительно ведущего и натяжного элементов.в нап равлении ведущей ветви бесконечного гибкого тягового органа, датчиком наличия заготовок, смонтированным на станине с возможностью взаимодействия с поворотным рычагом и электрически связанным с приводом. Устройство снабжено подъемным ст лом для заготовок, установленным на станине. На фиг. 1 схематически изображ но устройство, вид сбоку; на фиг.2 сечение А-А на фиго 1; на фиг. 3 узел 1 на фиг„ 1 (положение дополни тельной звездочки и двуплечего рыча га, без воздействия на последний ст пы заготовок); на фиГо 4 - то же. в момент воздействия стопы на верхнее плечо двухплечего рычага. Устройство содержит станину 1, гибкий тяговый орган 2, выполненный 92 в виде нескольких бесконечных цепей 3, охватывающие ведомые 4 и ведущие 5 звездочки, последние из которых кинематически связаны с приводом (не показано). Между ведомыми и ведущими звездочками смонтированы дополнительные ведомые звездочки 6. Соосно с дополнительными звездочками 6 с возможностью свободного поворота относительно одной из дополнительных звездочек смонтирован двухплечий рычаг 7, взаимодействующий одним из CBoitx плеч с датчиком 8 наличия заготовок над дополнительными звездочками 6. Датчик 8 электрически соединен с системой управления (не показано) гибкого тягового органа 2. Ответньй элемент 9 датчика 8 смонтирован на одном, в частности нижнем, плече двухплечего рычага 7 с возможностью взаимодействия этого ответно- -го элемента 9 с датчиком 8, когда ось симметрии центра тяжести поперечного сечения стопы 10 находится в одной плоскости с ось;« симметрии захватных органов 11 перекладчика 12, В тсаком положении стопа 10 совместно с гибким тяговым органом 2 наклонена, в сторону ведущей 5 звездочки и нижней своей плоскостью соприкасается со вторым, в частности верхним, плечом двуплечего рычага 7. На позиции разбора стопы 10 под ней имеются столы f3 для подъема стопы пр мере расходования из нее заготовок. Ведомые 4 и дополнительные ведомые 6 звездочки находятся в одной горизонтальной плоскости, а ведующая звездочка 5 расположена ниже ведомых, Работа устройства осуществляется следующим образом. При перемещении движителя гибкого тягового органа 2 от силового органа (не показано) через ведущие звездочки 3 в сторону перекладчика 12 заготовок вместе с ним в эту же сторону перемещается-И стопа 10, которая, дойдя свои центром тяжести поперечного сечения до вертикальной плоскости, проходящей через ось захватных органов 11 и ось дополнительных звездочек 6, начинает наклоняться по наклонной части гибкого тягового органа 2 в сторону ведущей 5 звездочки. Стопа 10 при переходе на наклонную часть своей нижней плоскостью давит на верхнее плечо двухплечего рычага 7. Рычаг своим верхним плечом отклоняется в сторону наклонной част гибкого тягового органа 2, а нижним плечом - в сторону прямолинейной части его, при этом ответный элемент 9, закрепленный на нижнем плече двух плечего рычага 7, входит в прорезь его датчика 8. Датчик через систему управления (не показано) разрьгоает электрическую цепь силового органа и гибкий тяговый орган 2 .вместе со стопой 10 останавливается, а стопа 10 подъеИными сипами 13 выравнивается и поднимается до необходимого уровня для захвата верхней заготовки захватным органом 11 перекладчика
Фиг. 2 79 12, После расходования стопы с заготовками перемещением гибкого тягового органа 2 подается следующая стопа 10,которая фиксируется в описанной вьпие последовательности, и процесс разбора заготовок продолжается. Преимуществом транспортирующего устройства по сравнению с известным является отсутствие перекладки и регулирования положения стопы заготовок за счет точного останова при совпадении оси симметрии ее по ширине с осью захватных органов перекладчика при разборке стопы любой ширины.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для загрузки заготовок | 1972 |
|
SU461133A1 |
| УСТРОЙСТВО ДЛЯ РАЗБОРА ПАКЕТА УЛОЖЕННЫХ С ПРОКЛАДКАМИ ДОСОК | 1991 |
|
RU2031065C1 |
| Устройство для подачи материала в рабочую зону пресса и удаления отштампованных изделий | 1985 |
|
SU1321504A1 |
| АВТОМАТИЧЕСКАЯ ЛИНИЯ ДЛЯ ШТАМПОВКИ КРУПНОГАБАРИТНЫХ ДЕТАЛЕЙ | 1992 |
|
RU2041001C1 |
| Стенд для испытания деталей машин с гибкими передачами | 1977 |
|
SU678379A1 |
| Устройство Кривовязюка для вырубки заготовок из плоского материала | 1980 |
|
SU946733A1 |
| Устройство для подачи длинномерного материала в зону обработки | 1984 |
|
SU1220835A1 |
| Захватное устройство для грузов с проушинами | 1990 |
|
SU1787925A1 |
| Устройство для отделения верхнего листа от стопы и подачи его в зону обработки | 1986 |
|
SU1395406A1 |
| Привод шаговых перемещений | 1990 |
|
SU1778048A1 |
1„. УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ЗАГОТОВОК, содержащее смонтированные на станине бесконечный гибкий тяговый орган, охватывающий ведущий от привода и натяжной элементы, механизм остановки заготовок, выполненный в виде поворотного рычага, установленного на оси, отличающееся тем, что, с целью повышения удобства обслуживания и сниже-ния трудоемкости переналадки, оно снабжено ведомым элементом бесконечного гибкого тягового органа, установленным на оси поворотного рычага с возможностью вращения, со смещением относительно ведущего и натяжного элементов в направлении ведущей ветви бесконечного гибкого тягового органа, датчиком наличия заготовок, смонтированным на станине с возможi ностью взаимодействия с поворотным рычагом и электрически связанным с (Л С приводом. 2. Устройство по п. 1, отличающееся тем, что оно снабжено подъемным столом для заготовок, установленным на станине. П 8 Фиг.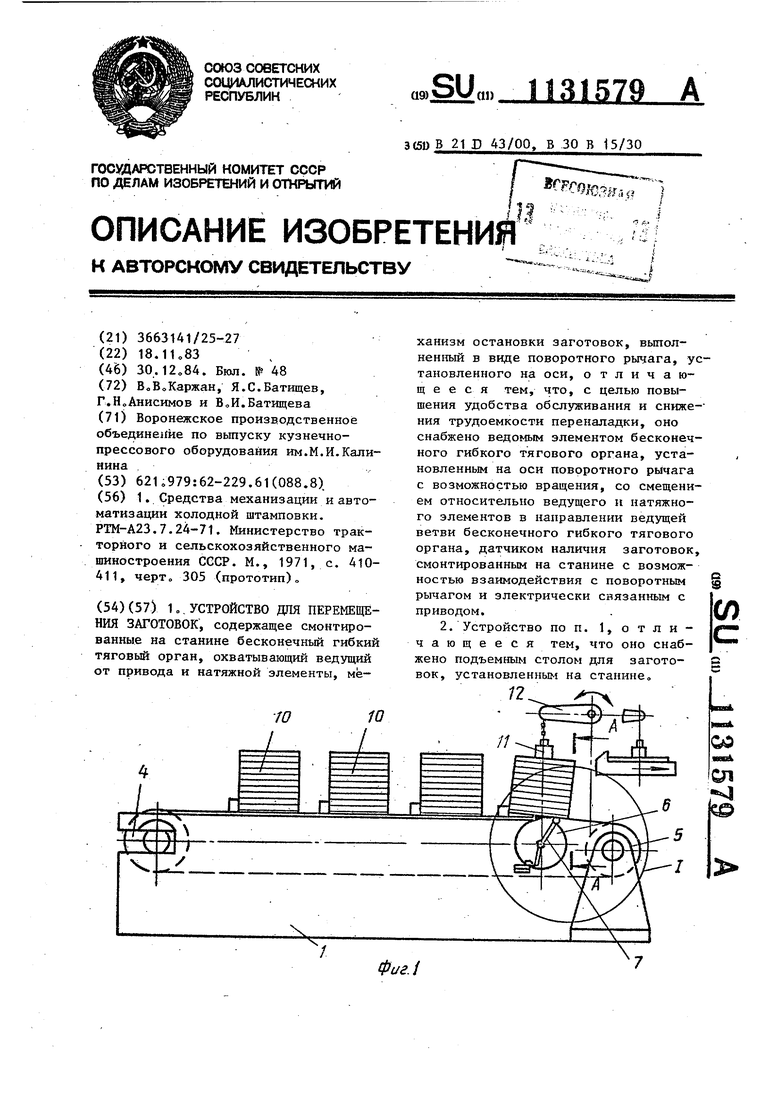
ю
фиг л
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Средства механизации и автоматизации холодной штамповки | |||
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Министерство тракторного и сельскохозяйственного машиностроения СССР | |||
| М., 1971, с | |||
| 1971 |
|
SU410411A1 | |
| Держатель для поленьев при винтовом колуне | 1920 |
|
SU305A1 |
