Изобретение относится к области промышленного транспорта и может быт использовано в текстильной и других отраслях промышленности для последовательного автоматического адресования грузов к станкам в многопролет ных цехах. Известно устройство для распределения грузов по местам назначения, содержащее подвижный вдоль кран-балки грузоноситель, адресователи грузоносителя, расположенные вдоль пути его перемещения, и считыватель адреса грузоносителя, выпол-юнный в виде конечных выключателей, установленных подвижно на винте, кинематически свя занном с электроприводом его переме щения, и включенных в цепь привода грузоносителя flj . Недостатком известного устройства является то, что область его применения ограничена управлением грузоносителем, движущимся по одной коор динате. Известное устройство не может быть применено для адресования грузов по сложной трассе, например по трем различным координатам, что необходимо, например при распределе нии груза станкам, расположенным по площади современного многопролетного цеха, т.е. устройство имеет ограниченные функциональные возможности. Цель изобретения - расширение функциональных возможностей. Указанная цель достигается тем, что устройство снабжено адресовате,-ямк кран-белки, установленными вдоль траектории ее перемещения, и размещенными на груэоносителе считывателем адреса кран-балки, конвейером для разгрузки груза и адресователями и считывателями адреса груза, причем считыватель адреса кран-балки выполнен в виде включенных в цепь ее привода конечных выключателей, установленных на винте с противоположными резьбами на концах, кинематически связанном с эле;стропривЬдом его перемещения и размещенном на грузоносителе перпендикулярно винту считывателя адреса грузоносителя, адресователи груза выполнены в виде кулачков, расположенных с определенным шагом на цепи конвейера для разгрузки груза и взаимодействующих со считывателями адреса груза, выполненными в виде конечных выключателей, включенных в цепь привода конвейера
для разгрузки . А также тем, что устройство снабжено конечными выключателями для движения кранбалки и грузоносителя, включенными последователь11о с конечными выключателями считывателей адреса соответственно кран-б лки и грузоносителяг в Цепи приводов соответственно кранбалки и грузоносителя.
И, наконец, тем, что привод конвейера для разгрузки груза выполнен реверсивным.
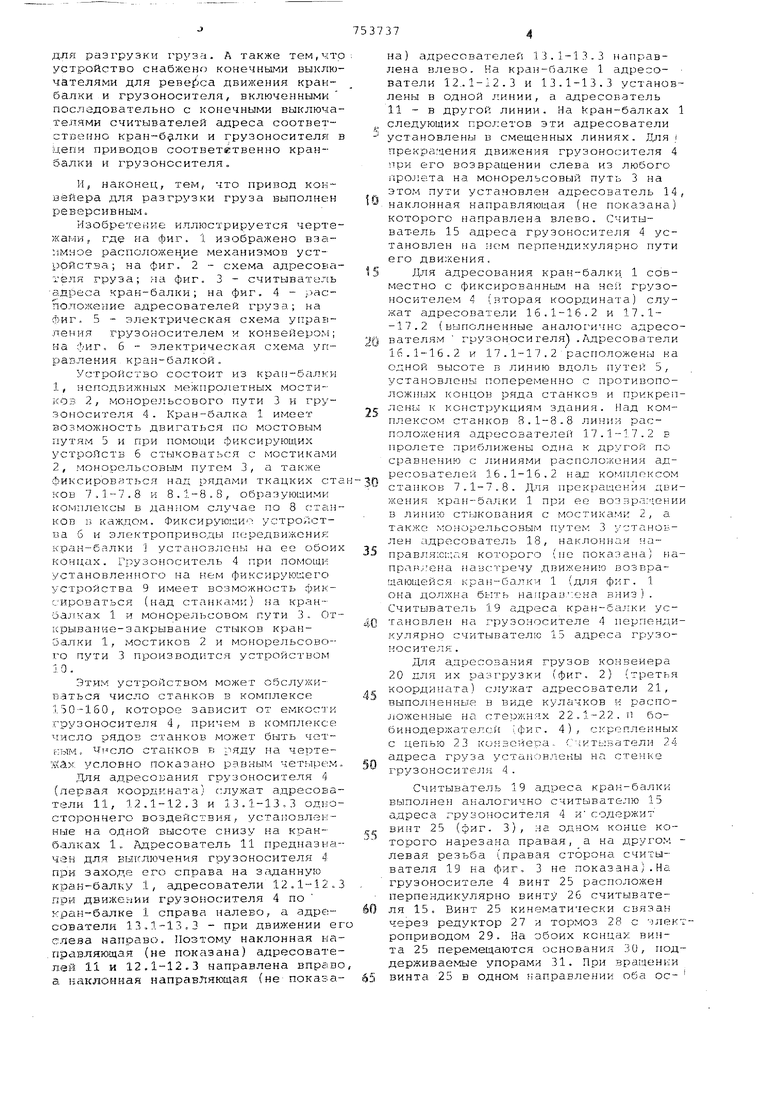
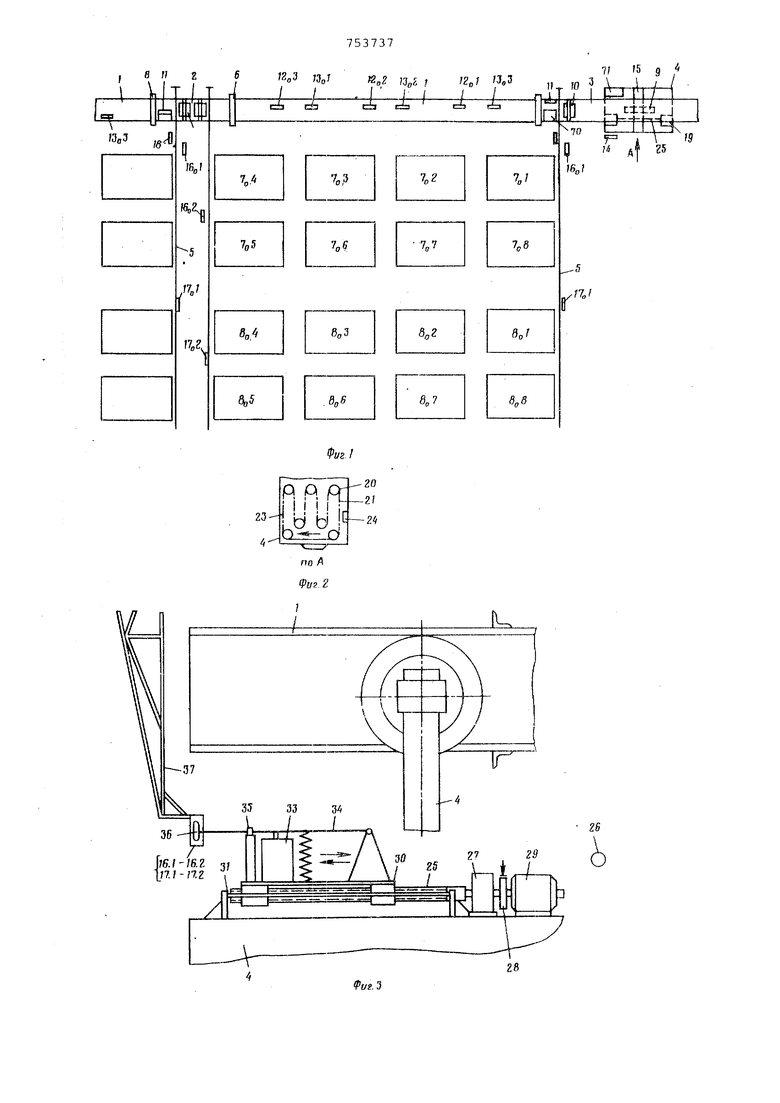
Изобретение иллюстрируется чертежами, где на фиг. 1 изображено взаимное расположен ие механизмов устройства; на фиг. 2 - схема адресователя груза; на фиг. 3 - считыватель адреса кран-балки; на фиг. 4 - ;засположение адресователей груза; на Фиг. 5 - электрическая схема управления грузоносителем и конвейером; на Лиг. 6 - электрическая схема управления кран-балкой.
Устройство состоит из кран-балки
1,неподвижных межпролетных мостикОз 2, MOHOpe JibcoBoro пути 3 и грузоносителя 4. Кран-балка 1 имеет возможность двигаться по мостовым путям 5 и при помощи фиксирующих устройств 6 стыковаться с мостиками
2,монорельсов 21м путем 3, а также фИксировзться над рядами ткацких ста;сов 7. 1-7.8 и 8.1-8.8, образующими комплексы в данном случае по 8 станков li каждом. Фиксируюцио устройства б и электроприводы передвижения кран-балки I установлены на ее обоих концах. Грузоноситель 4 при помощ -; установлеьиюго на ь-ем фиксирующего устройства 9 имеет возможность фиксироваться (над станками) r-ja кранбалках 1 и монорельсовом пути 3. Открывание-закрывание стыков кранбалки 1, мостиков 2 и монорельсового пути 3 производится устройством 10.
Этим устройством может обслуживаться число станков в комплексе 150-160, которо-е зависит от емкости трузоносителя 4 , причем в комплексе число рядов станков может быть чет(-;ьтм. J1сло станков в ряду на черте ; ах условно показано равным ч е т: лр е-м
Для адресования грузоносителя 4 (первая координата) служат а.дресователи 11, 12.1-12.3 и 13.1-13,3 одностороннего воздействия,, установленные на одной высот€5 снизу на кранбалках 1. Адресователь 11 предназначай для выключения грузоносителя 4 при заходе его справа на заданную кран-балку 1, адресователи 12.1-12.3 при движеггии грузоносителя 4 по кран-балке 1 справа налево, а адресователи 13, - при движении ег слева направо. Поэтому наклонная на.правлякадая (не показана) адресователай 11 и 12.1-12пЗ направлена вправо а наклонная направляющая (не показана) адресователей 13.1-13.3 направлена влево. На кран-балке 1 адресователи 12.. 1-12.3 и 13.1-13.3 установлены в одной линии, а адресователь 11 - в другой линии. На Кран-балках 1 следующих пролетов эти адресователи установлены в смещенных линиях. Для / прекра: дения движеЕ{ия грузоносителя 4 при его возвращении слева из любого пролета на монорельсовый путь 3 на этом пути установлен адресователь 14 наклонная направляющая (не показана) которого направлена влево. Считыватель 15 адреса грузоносителя 4 установлен на нем перпендикулярно пути его движения.
Для адресования кран-балки. 1 совместно о фиксированнььм на неГ; грузоносителем 4 (вторая координата) служат адреоователи 16.1-16.2 и 17.1-17.2 (выполненные аналогично адресователям грузоноси геля|) .Адресователи 16.1-16.2 и 17 . 1-17.2 расположены на одной высоте в линию вдоль путей 5, установлены попеременно с противоположнр х концов ряда станков и прикре лень к конструкциям здания. Над комплексом станков 8.1-8.8 линии расположения адресователей 17.1-17.2 в пролете приближены одна к другой по сравнению с линиями расположения адресователей 16.1-16.2 над КОГ.1ПЛПКСОМ станков 7.1-7.8. Для Г1рек1)ацени.ч движения кран-ба.пки 1 при ее воз зрагчении в линию стыкования с мостиками 2, а также монорельоовым путем 3 установлен адресователь 18, наклонная направля;с ;;ая которого (не показана) направлена навстречу движению возврагдающейся кран-балки 1 (для фиг. 1 она до.пжна быть на11ра:з:ена вниз ) . Считыватель 19 адреса кран-балки установлен на грузоносителе 4 нерпендикул.ярно считывателю 15 адреса грузоносителя .
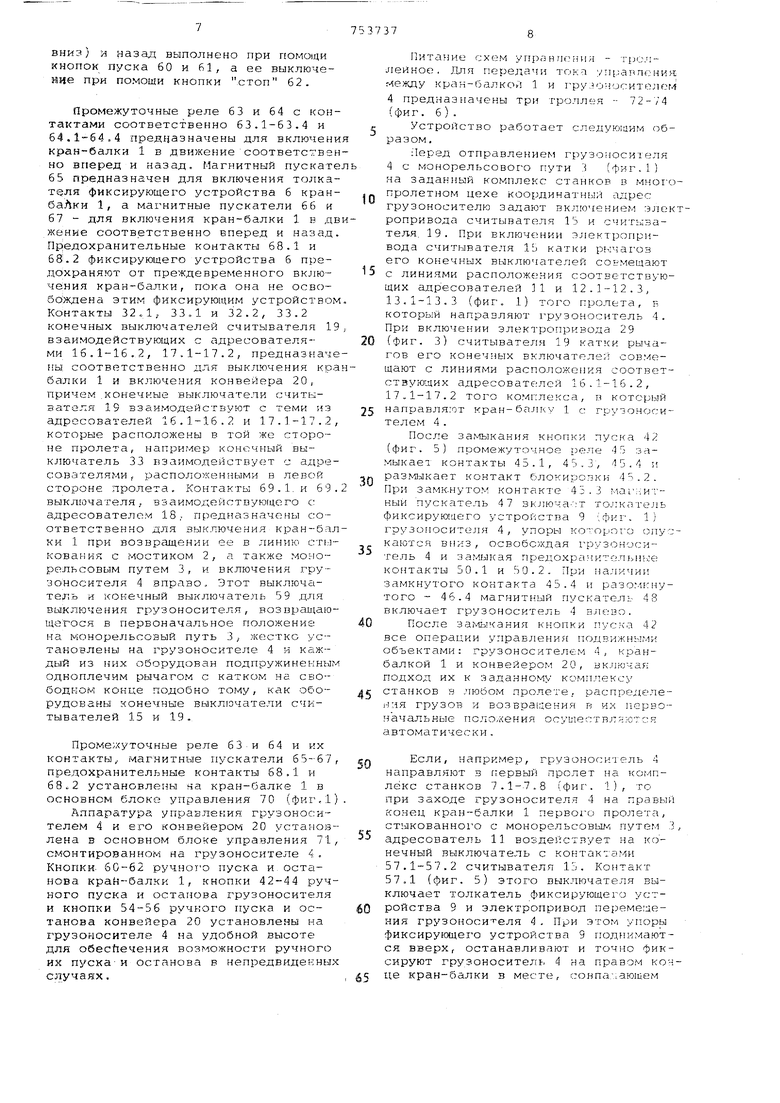
Для адресования грузов конвейера 20 для их разгрузки (фиг. 2) (тузетья координата) служат адресователи 21, выполненные в виде кулачков и расположенные на стержнях 22.1-22. п бобинодержателс.й ;фиг. 4), скрепленных с цепью 23 кинзсйера.. Г-;итыБатели 24 адреса груза уста1- овлены на стенке грузонооитедьч 4 .
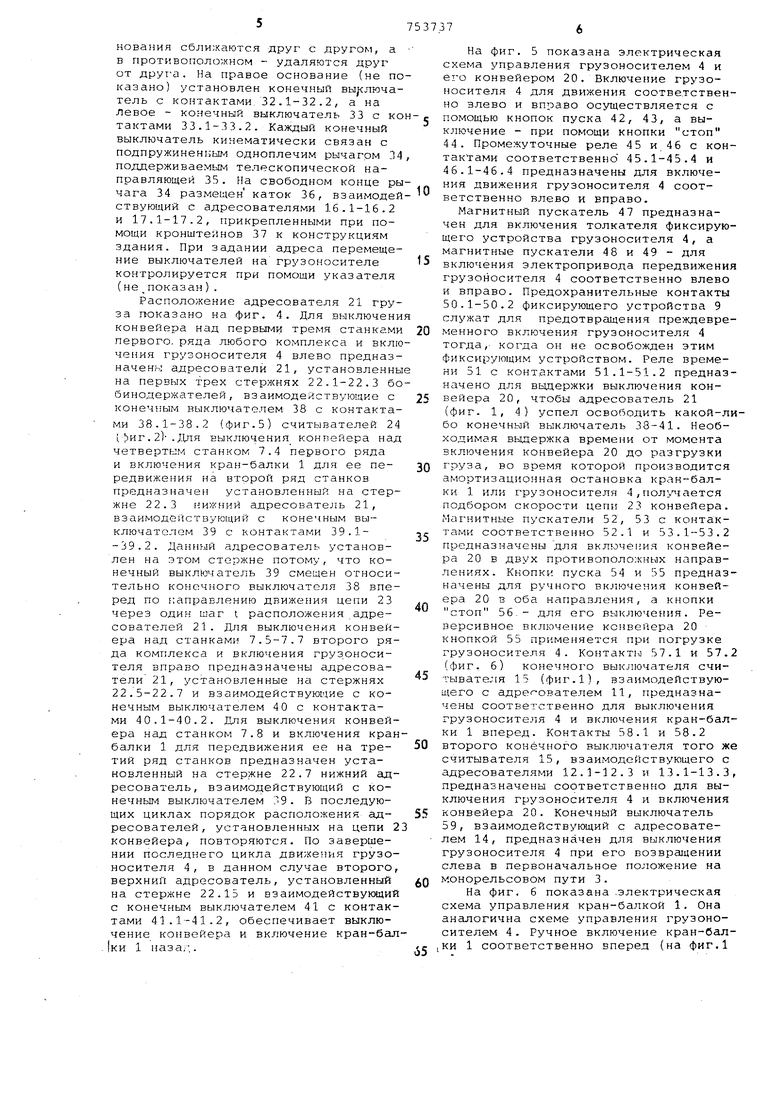
Считыватель 19 адреса кран-балки выполнен аналогично считывателю 15 адреса грузоносите.ля 4 и со,пержит винт 25 (фиг. 3), на одном конце которого нарезана правая, а на другом левая резьба (правая сторона считывателя 19 на фиг, 3 не показана).На грузоносителе 4 винт 25 расположен перпендикулярно винту 26 считывателя 15. Винт 25 кинематически связан через редуктор 27 и тормоз 2В с члектроприводом 29. На обоих концах винта 25 перемещаются основания 30, поддерживаемые упорами 31. При вращении винта 25 в одном направлении оба основания сближаются друг с другом, а в противоположном - удаляются друг от друга. На правое основание (не показано) установлен конечный вы лючaтель с ко11тактами. 32 .1-32 . 2 , а на Левое - конечный выключатель 33 с ко тактами 33.1-33.2. Каждый конечный выключатель кинематически связан с подпружинен 1-ым одноплечим рычагом 34 поддерживаемым телескопической направляющей 35. На свободном конце рычага 34 размещен каток 36, взаимодействующий с адресователями 16.1-16.2 и 17.1-17.2, прикрепленными при помощи кронштейнов 37 к конструкциям здания. При задании адреса перемещение выключателей на грузоносителе контролируется при помощи указателя (не показан) .
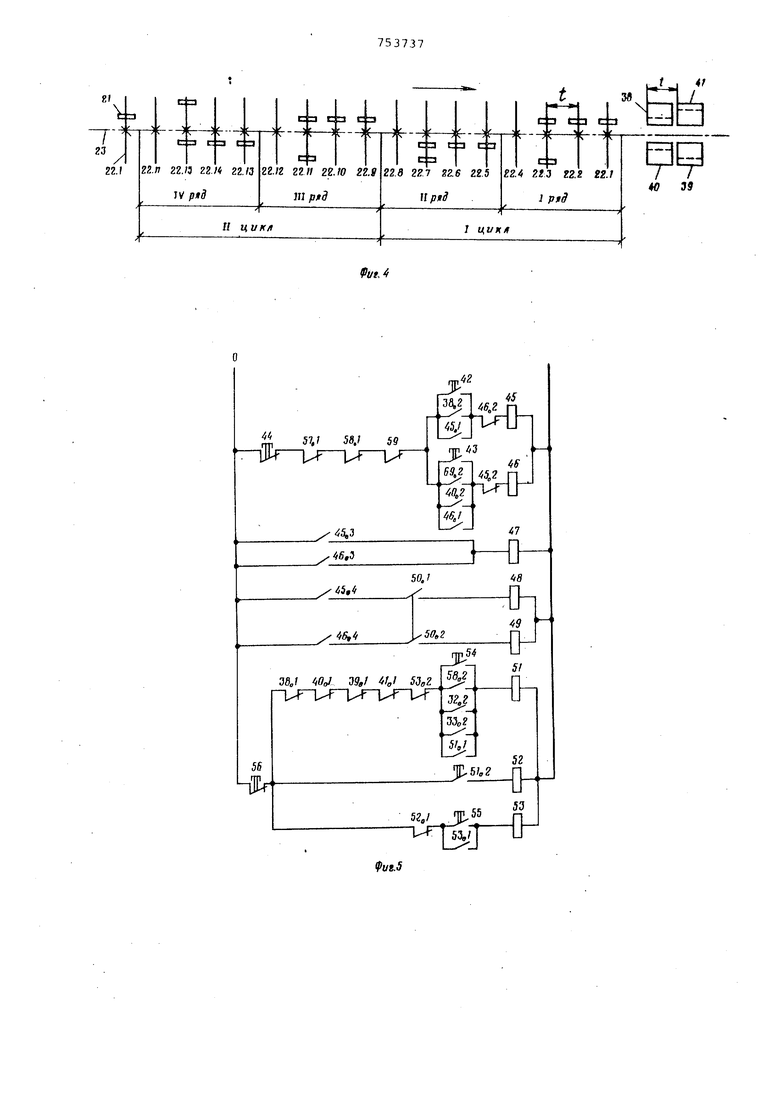
Расположение адресователя 21 груза показано на Фиг. 4. Для выключени конвейера над первьлми тремя станками первого, ряда любого комплекса и включения грузоносителя 4 влево предназначены адресователи 21, установленны на первых трех стерл нях 22.1-22.3 бобинодержателей, взаимодействующие с конечным выключателем 38 с контактами 38.1-38.2 (фиг.5) считывателей 24 гЬиг. 2)- .J.VTH выключения конвейера над четвертым станком 7.4 первого ряда и включения кран-балки 1 для ее передвижения на второй ряд станков предназначе установленный на стержне 22.3 НИЖНИЙ адресователь 21, взаимодействующий с конечным выключателем 39 с контактами 39.1-39.2. Данный адресователь установлен на этом стержне потому, что конечный выключатель 39 смещен относительно конечного выключателя 38 вперед по гаправлению движения цепи 23 через один шаг i расположения адресователей 21. Для выключения конвейера над станками 7.5-7.7 второго ряда комплекса и включения грузоносителя вправо предназначены адресователи 21, установленные на стержнях 22.5-22.7 и взаимодействующие с конечным выключателем 40 с контактами 40.1-40.2. Для выключения конвейера над станком 7.8 и включения кранбалки 1 для передвижения ее на третий ряд станков предназначен установленный на стержне 22.7 нижний адресователь, взаимодействующий с конечным выключателем 39. В последующих циклах порядок расположения адресователей, установленных на цепи 2 конвейера, повторяются. По завершении последнего цикла движения грузоносителя 4, в данном случае второго, верхний адресователь, установленный на стержне 22.15 и взаимодействукмдий с конечным выключателем 41 с контактами 41.1-41.2, обеспечивает выключение конвейера и включение кран-бсш|ки 1 наза,-..
На фиг. 5 показана электрическая схема управления грузоносителем 4 и его конвейером 20. Включение грузоносителя 4 для движения соответственно влево и вправо осуществляется с помощью кнопок пуска 42, 43, а выключение - при помощи кнопки стоп 44. Промежуточные реле 45 и 46 с контактами соответственно 45.1-45.4 и 46.1-46.4 предназначены для включения движения грузоносителя 4 соот0ветственно влево и вправо.
Магнитный пускатель 47 предназначен для включения толкателя фиксирующего устройства грузоносителя 4, а магнитные пускатели 48 и 49 - для
5 включения электропривода передвижения грузоносителя 4 соответственно влево и вправо. Предохранительные контакты 50.1-50.2 фиксирующего устройства 9 служат для предотвращения преждевре0менного включения грузонооителя 4 тогда, когда он не освобожден этим фиксирующим устройством. Реле времени 51 с контактами 51.1-51.2 предназначено для выдержки выключения конвейера 20, чтобы адресователь 21
5 (фиг. 1, 4) успел освободить какой-либо конечный выключатель 38-41. Необходимая выдержка времени от момента включения конвейера 20 до разгрузки груза, во время которой производится
0 амортизационная остановка кран-балки 1 или грузоносителя 4 , полу гается подбором скорости цепи 23 конвейера. Магнитные пускатели 52, 53 с контактами соответственно 52.1 и 53.1-53.2
5 предназначены для включе1 ия конвейера 20 в двух противоположных направлениях. Кнопки пуска 54 и 55 предназначены для ручного включения конвейера 20 в оба направления, а кнопки
0 стоп 56.- для его выключения. Реверсивное включение конвейера 20 кнопкой 55 применяется при погрузке грузоносителя 4. Контакты 57.1 и 57.2 (фиг. 6) конечного выключателя счи5тывателя 15 (фиг.1), взаимодействующего с адрег-ователем 11, предназначены соответственно для выключения грузоносителя 4 и включения кран-балки 1 вперед. Контакты 58.1 и 58.2
0 второго конечного выключателя того же считывателя 15, взаимодействующего с адресователями 12.1-12.3 и 13.1-13.3, предназначены соответственно для выключения грузоносителя 4 и включения конвейера 20. Конечный выключатель
5 59, взаимодействующий с адресователем 14, предназначен для выключения грузоносителя 4 при его возвращении слева в первоначальное положение на монорельсовом пути 3.
0
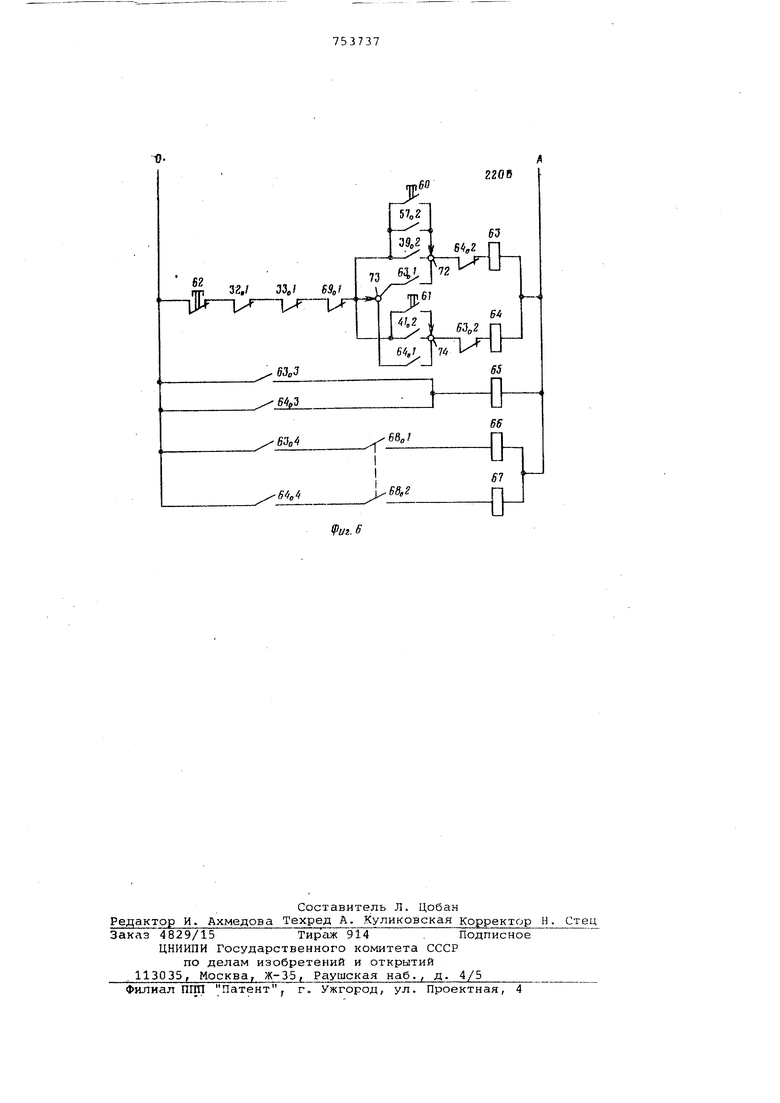
На фиг. 6 показана -электрическая схема управления кран-балкой 1. Она аналогична схеме управления грузоносителем 4. Ручное включение кран-бал,ки 1 соответственно вперед (на фиг.1
5 вниз; и назад выполнено при помо|ДИ кнопок пуска 60 и 61, а ее выключеняе при помощи кнопки стоп 62. Промежуточные реле 63 и 64 с контактами соответственно 63.1-63.4 и 64.1-64.4 пред1)азначены для включени кран-балки 1 в движение соответствен но вперед и назад. Магнитный пускате 65 гфедназначен для включения толкате:ля фиксирующего устройства 6 кранбаЛки 1, а магнитные пускатели 66 и 67 - для включения кран-балки 1 в дв жение соответственно вперед и назад Предохранительные контакты 68.1 и 68.2 фиксирующего устройства 6 предохраняют от преждевременного включения кран-балки, пока она не освобождена этим фиксирующим устройством Контакты 32,1, ЗЗЛ и 32.2, 33.2 конечных выключателей считывателя 19 взаимодействующих с адресователями 16.1-16.2, 17.1-17.2, предназначе ны соответственно для выключения кра балки 1 и вк.пючения конвейера 20, причем .конечные выключатели считЕ азателя 19 взаимодействурэт с теми из адресователей 16.1-16.2 и 17.1-17.2 которые расположены в той же стороне пролета, например конечный выключатель 33 взаимодействует с адресователями. расположенными в левой стороне пролета. Контакты 69.1. и 69 выключателя, взаимодействуюгцего с: адресователем 18,, предназначены соответственно для выключения кран-бал ки 1 при возвращении ее в линию CTKJКования с мостиком 2, а также монорельсовым путем 3, и включения грузоносителя 4 вправо. Этот выключа1тель и конечный выключатель 59 для выключения грузоносителя, возвращающегося в первоначальное положение: на монорельсоБый путь 3, жестко установлены на грузоносителе 4 и каждый из них оборудован подпружиненным одноплечим рычагом с катком на СЕЮбодком конце подобно тому, как оборудованы конечные выключатели считывателей 15 и 19. Проме;; уточные реле 63-и 64 и их контакты, магнитные пускатели 65-67 предохранительные контакты 68.1 н 68.2 установлены на кран-балке 1 в основном блоке управления 70 (фи1%1 Аппаратура управления грузоносителем 4 и его конвейером 20 устано1з лена в основном блоке управления 71 смонтированном на грузоносителе 4. Кнопка 60-62 ручното пуска и останова край-балки 1, кнопки 42-44 руч ного пуска и останова грузоносителя и кнопки 54-56 ручного пуска и останова конвейера 20 установлены на грузоносителе 4 на удобной высоте для обесйечення возможности ручного их пуска и останова в непредвидекньлх случаях. питание схем у пра н псгши - тро.члейное. Для передачи тока уги :аппения между кран-балкой 1 и грузочосителом 4 предназначены три троллея - 72-/4 (фиг. 6). Устройство работает следующим образом , Леред отправлением грузоносителя 4 с монорельсового пути 3 (фиг.1) на заданный комплекс станков в многопролетном цехе координатный адрес ГРУзоносителю задают включением электропривода считывателя 15 и считывателя. 19. При включении электропривода считывателя 15 катки р.1чагоз его конечных выключателей совмещают с линиями расположения соответствующих адресователей 11 и 12.1-12.3, 13.1-13.3 (фиг. 1) того пролета, к который направляют грузоноситель 4. При включении электропривода 29 (фиг. З) считывателя 19 катки рычагов его конечных включателей совмещают с линиями расположе1 ия соответствующих адресователей 16.1-16.2, 17,1-17.2 того комплекса, направля:от кран-ба п у 1 с телем 4. После замыкания кнопки (фиг. 5) промежуточное реле MFJKaeT контакты 45.1, 45.3, - 5.4 и размокает контакт блокирспки 45.2. При замк-нутом контакте 45.3 маг:-;и1ныи пускатель 47 включа тг толкатель фиксирующего устройства 9 фиг. 1) грузоносителя 4, упоры ко-орлго (впускаются вниз, освобохдая грузоноситель 4 и замыкая предохргкчителтаньле контакты 50.1 и 50.2. При наличии замкнутого контакта 45.4 и разо-л1;мутого - 46.4 магнитный пускатель 48 включает грузоноситель 4 влево. После зa лыкaния кнопки пуска 42 все операции управления подвижными объектами: грузоносителе.м 4, кранбалкой 1 и конвейером 20, включая подход их к заданному комплексу станков в любом пролете, распределе1-ия грузов и возвращения в первоначальные положения OCy i eCTBJ7H OTCR автоматически. Если, например, грузоноеичель 4 направляют в гтервый пролет на комплекс CTaiiKOB 7.1--7.8 (фиг . 1), то при заходе грузоносителя 4 на правый конец кран-балки 1 первого пролета, стыкованного с монорельсовы -, путем 3, адресователь 11 возде :ствует на конечный выключатель с контак-ами 57.1-57.2 считывателя 15. Контакт 57.1 (фиг. 5) этого выключателя выключает толкатель фиксирующего устройства 9 и электропривод переме:ления грузоноси еля 4 . При этом упоры фиксирующего устройства 9 поднимаются вверх, останавливают и точно фиксируют грузоноситель. 4 на правом конце кран-балки в месте, сонпа- аюшем
с правым столбиком станков в обоих комплексах. Контакт 57.2 (фиг, 6) включает толкатели фиксирующих устройств 6 и электроприводы кран-балки 1 для передвижения ее с груэоноси.телем 4 вперед. Пуск кран-ба-лки 1 в движение происходит аналогично пуску груэоносителя 4. При замыкании контакта 57.2 при помощи троллей 72 и 73 срабатывает промежуточное реле 63, которое замыкает контакты 63.1, 63.3, 63.4 и размыкает контакт блокировки 63.2.- При этом магнитный пускатель 65 включает толкатели фиксирующих устройств 6, упоры которых опускаются вниз, освобождая кран-балку 1 и замыкая предохранительные контакты 68..2. При наличии замкнутого контакта 63.4 магнитный пускатель 66 включает кранбалку 1 в движение вперед.
При подходе ее к первому ряду станков 7.1-7.4 адресователь 16.1 (фиг.1 воздействует на конечный выключатель считывателя 19 и переключапт его, при этом его контакт 32.1 (фиг. 6) выключает фиксирующие устройства 6 и электропривод кран-балки 1. При этом упоры фиксирующих устройств 6 поднимаются вверх, останавливагот и точно фиксируют кран-балку 1,над первым рядом станков 7.1-7.4 комплекса. Контакт 32.2 (фиг. 5) через реле времени 51 включает конвейер 20 для разгрузки груза. С замыканием контакта 32.2 реле времени 51 мгновенно замыкает контакты 51.1 и 51.2. При замыкании контакта 51.2 магнитный пускатель 52 включает конвеГ ер 20 и размыкает контакт блокировки 52.1. После разгрузки груза на станке 7.1 адресователь 21, установленный на цепи 23 конвейера, раз -1ыкает конечный выключатель 38 считывателей 24 . С разг.шжэнием контакта 38.1 с определенной небольшой выдерж;ой времени вр тключае ся конвейер 20, а второй контакт 38.2 включает фиксирующее устройство 9 и электропривод грузоносителя 4 для передвижения его влево.
С приближением грузоносителя 4 к станку 7.2 (фиг. 1) адресователь 12 воздействует на другой конечный выключатель считывателя 15, первый контакт 58.1 которого (фиг. 5) выключает фиксирующее устройство 9 и электропривод грузоносителя 4, который останавливается и точно фиксируется нал стаком 7.2. Второй контакт 58.2 включает конвейер 20. После выгрузки груза контакт 38.1 выключает конвейер 20, а контакт 3.8.2 включает грузоноситель 4 влево. Операции управления, осуществляемые на станке 7.2, в каждом нечетном ряду повторяются п-2 раза (см. табл.), где п - число станков в ряду.
При подходе грузоносителя 4 к порледнему станку 7.4 первого ряда
контакт 58.1 выключает фиксирующее устройство 9 и электропривод грузоносителя 4, а контакт 58.2 включает конвейер 20. Выключение грузоносителя 4 и включение конвейера 20 на станке 7.4 осуществляется так же, как на предыдущих п-2 станках первого ряда. Далее при переходе на второй ряд станков операции управления меняются. После разгрузки груза на станке 7.4 конвейер 20 выключается
o контактом 39.1, а контактом 39.2 (фиг. 6) так же, как контактом 57.2, включаются фиксирующие устройства 6 и электроприводы кран-балки 1 для передвижения ее вперед на второй ряд
5 станков.
При подходе ко втором ряду станков 7.5-7.8 комплекса адресователь 16.2 воздействует на конечный выключатель 33 считывателя 19. Первый контакт 33.1 (фиг. 6) выключает фикси0рующие устройства 6 и электроприводы коан-балки 1, которая, останавливается и точно фиксируется над вторым рядом станков. Вто.ро-i контакт 33. 2 включает KOHBeiiep 20. После раз5грузки груза контакт 40.1 выключает конвейер 20, а контакт 40.2 включает грузоноситель 4 вправо. Включение грузоносителя 4 вправо осуществляется при помощи промежуточного реле 46.
0 При замыкании контакта 40.2 реле 46 замыкает контакты 46.1, 46.3, 46.4 и размыкает контакт блокировки 46.2. При наличии замкнутого контакта 46.3 магнитный пускатель 47 заключает фик5сирующее устройство 9, упоры которого опусг аются вниз. С опусканием этих упоров освобо чцается грузоноситель 4 и замыкаются предохрс П1тельные контакты 50.1, 50.2. При наличии замкну0того контакта 46.4 магнитный пускатель 49 включает грузоноситель 4 вправо.
С приближением грузоносителя 4 к станку 7.6 (фиг. 1) адресователь 3.1 воздействует на конечный вы5ключатель сч: тывателя 15 и переключает его. Первый контакт 58.1 (фиг.5) выключает фиксирующее устройство 9 и электропривод грузоносителя 4, а второй контакт 58.2 включает конвей0ер 20. После разгрузки груза конвейер 20 -выключается контактом 40.1, а контактом 40.2 включается грузоноситель 4 вправо, Операции управления, осуществляемые на станке 7.6, повто5ряются в каждом четном ряду п-2 раза.
При подходе грузоносителя 4 к станку 7,8 адресователь 13.3 воздействует на тот же конечный выключатель считывателя 15 и n€peKJTO4aeT его.
0 Первый контакт 58.1 выключает фиксирующее устройство 9 и электропри|Вод грузоносителя 4, а второй контак|г 58-2 включает конвейер 20. Если после завершения первого цикла движе5ния груэоносителя 4, т.е. после обсл живания первого и второго ряда станков соответственно 7.1-7.4 и 7.5-7.8 необходимо продолжить обслуживание станков в следующих рядах, то конвейер 20 выключается контактом 39.1, а контактом 39-.2 включается мост 1 для передвижения его вперед на трети ряд станков. После завершения последнего цикла движения грузоносителя 4, заданного по программе, установленный на стерж не 22.15 верхний адресователь 21 эамЫкает конечный выключатель 41, первый контакт 41.1 которого выключает конвейер 20, а второй контакт 41.2 (фиг. 6) включает фиксирующие устро ства 6 и электроприводы кран-балки 1 в обратное направление. При зам1л ка НИИ контакта 41.2 при помощи троллей 74, (73) срабатывает промежуточное реле 64, которое замыкает контакты 64«1, 64.3 и 64.4 и размыкает контакт блокировки 64.2. При этом магнитный пускатель 65 опускает упоры фиксирующих устройств .6 , освобождая кран-балку 1 и замыкая предохранител ные контакты 68.1 и 68.2. При наличии замкнутого контакта 64.4 мат-нитный пускатель 67 включает электропри воды кран-балки 1 назад. Возвращающаяся кран-балка 1 выключается при помощи адресователя 18 (фиг. 1), воздействующего на конечный выключатель 69. Его первый кон42
одъезд
включается привод грузоносителя влево
57.1
выключается привод грузоносителя влево
57.2
включается привод кран-балки.вперед
32.
выключается привод кран-балки вперед 32.
включается конвейер 38.
выключается конвейер 38.
включается привод грузоносителя плево,
повторя:ется п-2 раза
58.
выключается привод грузоносителя влево 58,
включае;тся конвейер 38.
выключается конвейер 38.
включается привод грузоносителя влево
X
58.
выключается приу- д грузоносителя влево 58.
включается кон.оейер 39,
выключается конвейер 39,
включается привод кран-балки вперед
33.1выключается привод кран-балки вперед
33.2вклю ается конвейер
0) W
40.1выключается конвейер
40.2вклю гaeтcя привод грузоносителя вправо,
ч « а
а о н « о с повторяется п-2 раза
58.1выключается привод груэоносителя вправо
58.2включается конвейер
40.1выключается конвейер
« о а о н т
40.2включается привод грузоносителя вправо
58.1выключается привод грузоносителя вправо
58.2включается конвейер
39.1выключается конвейер
39.2включается привод кран-балки вперед такт 69.1 (фиг. б) выключает кранбалку 1, которая фиксирующими устройствами б останавливается и фиксируется в линии мостика 2 и монорельсОвого пути 3, а второй контакт 69.2 {фиг. 5) включает грузоноситель 4 вправо. С подходом грузоносителя 4 в исхс-, положение на монорельсовом пут5-: 3 он выключается адресователем 14, который воздействует на конечный выключатель 59 (фиг. 5). После выключения грузоносителя 4 выключателем -59 он останавливается и точно фиксируется фиксирующим устройством 9 . Тг1ким образом, при обслуживании любого пролета многопролетного цеха передвижение кран-балки 1 производится только тогда, когда грузоноситель 4 находится аа одном или на другом ее конце. При возвращении кран-балки 1 в линии стыкОВКи с мостиками 2 и монорельсовымпутем 3 грузоноситель 4 находится на правом ее конце. При распределении груза грузоноси- . тель 4 па кран-балке 1 совершает челночное движение, поэтому траектория движения грузоносителя 4 над комплексом станков является зигзагообразной. Операции управления грузоносителем 4, кран-балкой 1 и конвейером 20 для-любого рейса грузоносителя изложены в таблице
выключается конвейер
включается привод кран-балки назад
69.1выключается привод кран-балки назад
69.2включается привод грузоносителя влево 59 выключается привод грузоносителя влево
где г - число сдвоенных рядов в комплексе.
Для подъезда грузоносителя 4 из исходного его положения на монорельсовом пути 3 к любому комплексу станков в любом пролете необходимо осуществить операции управления: замкнуть кнопку пуска 42 (см. табл.) и на правом конце стыкованной кран-балки 1 заданного пролета переключить конечный выключатель с контактами 57.1 и 57.2 считывателя 15. При разгрузке груза над каждым станком необходимо осуществить следующие операции управления, переключить один из двух конечных выключателей считывателя 19 (управления кран-балкой), либо конечный выключатель с контактами 58.1 и 58.2 считывателя 15 (управления грузоносителем), а затем один конечный выключатель 38, 39, 40 или 41 считывателей 24 (управления конвейером). При возвращении грузоносителя 4 из любого комплекса станков, расположенного в любом пролете в первоначальное его положение, на монорельсовом пути 3 необходимо осуществить такие операции управления; переключить коночный выключатель с контактами 69.1 и 69.2 и конечный выключатель 59.
Устройство позво.-1яет за 25 мин доставить и распределить уток 155 ткацким станкам, что более чем в 4 раза быстрее, чем при гомощи карусельной напольной тележки, высвободить ДЛЯ других работ 12 транспортных в ткацком цехе, в котором установлено 1000 ткацких станков СТБ-216, автоматизировать распределение утка в боС.инах к ткацким станкам, освободить проходы, более эффективно использовать производственные площади, быстро менять адрес грузоносителя.
Формула изобретения
1. Устройство для распределения грузов по местам назначения, содержащее подвижный вдоль кран-балки грузоноситель, адресователи грузоносителя, расположенные вдоль пути его
перемещения, и считыватель адреса грузоносителя, выполненный в виде конечных выключателей, установленных
5 подвижно на винте, кинематически связанном с электроприводом его перемещения, и включенных в цепь привода грузоносителя, отличающеес я тем, что, с целью расширения
0 функциональных возможностей, оно снаб.хено адресователями кран-балки, установленны1.1и вдоль траектории ее перемещения и размещенными на грузоносителе считывателем адреса кран-балки, конвейером для разгрузки груза и ад5ресователями и считывателями адреса груза, причем считыватель адреса кранбалки выполнен в виде включенных в цепь ее привода конечных выключателей , установленных на винте с противо0положными резьбами на концах,кинематически связанном с электроприводом его перемещения и размещенном на грузоносителе перпендикулярно винту считывателя адреса грузоносителя-, адре5сователи груза выполнены в виде кулачков, расположенных с определенным шагом на цепи конвейера для разгрузки груза и взаимодействующих со считывателями адреса груза, выполненны0ми в виде конечных выключателей, включенных в цепь привода конвейера для разгрузки груза.
2.Устройство по п. 1, отличающееся тем, что оно снабжено конечными выключателями для ре5верса движе;;ия кран-балки и грузоносителя, включенными последовательно с конечными выключателями считывателей адреса соответственно кранбалки и грузоносителя в цепи приво0дов соответственно кран-балки и грузоносителя.
3.Устройство по п. 1, отличающееся тем, что привод конвейера для разгрузки груза выполнен
5 реверсивным.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР 592684, кл. В 65 G 47/46, 12.04.76
0 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для адресования грузоносителя | 1980 |
|
SU931607A1 |
| Система для распределения грузов по местам назначения | 1982 |
|
SU1131791A1 |
| Устройство для адресования грузо-НОСиТЕля | 1979 |
|
SU812676A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ГРУЗОНОСИТЕЛЕМ | 1991 |
|
RU2006435C1 |
| Устройство для адресования подвижного объекта | 1976 |
|
SU592684A1 |
| Устройство для управления грузоносителем | 1990 |
|
SU1787899A1 |
| Устройство для управления грузоносителем | 1980 |
|
SU912611A1 |
| Устройство для транспортировки грузов | 1974 |
|
SU512967A1 |
| Устройство для адресования груза | 1981 |
|
SU990611A1 |
| Устройство для автоматического адресования и выгрузки изделий | 1978 |
|
SU747788A1 |
й р, я:
I
ш
по /1
, г
гб
.f 4f
39
SB
7 г
40 У9
