Изобретение относится к области подъемно-транспортного машиностроения а именно к кранам-манипуляторам, используемым для обслуживания металлургических предприятий для снятия отливок с движущегося конвейера.
Известен кран-манипулятор, содержащий пролетное строение и установленную на нем грузовую тележку с телескопической колонной, несущей грузоподъемный орган, представляющий собой захватную лапу, укрепленную на подвижной в вертикальном направлении секции колонны и связанную с канатом приводного механизма, один из концов которого закреплен на приводном барабане, а другой - на ограничителе натяжения 1.
Недостатком известного устройства является малая надежность в работе при захвате грузов произвольной формы.
Цель изобретения - повышение надежности работы крана.
Поставленная цель достигается тем, что кран-манипулятор, содержащий пролетное строение и установленную на нем грузовую тележку с телескопической колонной, несущей грузоподъемный орган, представляющий собой захватную лапу, укрепленную на подвижной в вертикальном направлении секции колонны и связанную с канатом приводного механизма, один из концов которого закреплен на приводном барабане, а другой - на ограничителе натяжения, снабжен прикрепленным к подвижной секции колонны кронщтейном и дополнительной захватной лапой, расположенной с основной захватной лапой симметрично относительно вертикальной оси колонны, при этом обе лапы смонтированы на упомянутом кронштейне с возможностью поворота в вертикальной плоскости и выполнены каждая в виде Г-образного рычага, на свободных концах рычагов установлены блоки, огибаемые последовательно канатом приводного механизма.
На фиг. 1 изображен кран-манипулятор, общий вид; на фиг. 2 - кинематическая схема приводного механизма замыкания захватных лап.
Кран-манипулятор содержит пролетное строение 1, перемещающуюся по нему грузовую тележку 2 и тележку 3 с кабиной 4 управления, которая соединена с грузовой тележкой 2 шарнирной стяжкой 5.
На грузовой тележке 2 смонтирована поворотная платформа 6, к которой жестко прикреплена колонна 7. На последней расположены направляющие 8, по которым на роликах (не показаны) перемещается нижняя секция 9 колонны 7, соединенная с поворотной платформой 6 посредством канатной подвески 10, канат которой огибает блоки И и закреплен на лебедке (не показана), установленной на платформе 6. На секции 9 закреплен кронштейн 12, на котором поворотно смонтированы одна из основных лап 13 и дополнительная 14, выполненные в виде Г-образного рычага и симметрично расположенные относительно вертикальной оси колонны.
На одном конце каждой из указанных
лап укреплен канатный блок 15, а на другом выполнены щипы для зажатия отливки. На секции 9 смонтированы также приводной механизм основной и дополнительной захватных лап, включающий барабан 16,
5 канат 17 и блоки 18-20. Канат Г7 одним концом закреплен на барабане 16, а другим связан с ограничителем 21 его натяжения.
Другая основная лапа 22 жестко укреп0 лена на секции 9 колонны. Захватные лапы взаимодействуют с отливками 23, перемещающимися на конвейере 24.
Кран-манипулятор работает следующим образом.
5 Крановщик, управляя из кабины 4 механизмами передвижения крана, грузовой тележки 2, механизмами поворота платформы 6, лебедкой канатной подвески 10, барабаном 16, располагает лапы 13, 14 и 22 относительно отливки 23 так, что лапа 22 0 касается ее, а лапы 13 и 14 устанавливаются с зазором. При этом кран движется на малой скорости, равной скорости движения ленты конвейера 24. Затем крановщик, управляя приводом барабана 16, прижимает шипами лап 13 и 14 отливку 23 к лапе 22. После достижения расчетного усилия зажатия ограничитель 21 натяжения каната 17 срабатывает и механизм привода барабана 16 отключается. Затем крановщик, управляя лебедкой подъема, поднимает с поо мощью канатной подвески 10 захватные лапы 13, 14 и 22 вместе с отливкой 23 и доставляет ее краном к месту разгрузки. Опустив отливку на основание, крановщик включает привод барабана 16 на спуск. При этом лапы 13 и 14 под действием соб ственного веса и веса блоков 15 раскрываются и отпускают отливку 23.
Наличие жестко укрепленной на секции колонны лапы позволяет четко сориентировать захват относительно отливки путем непосредственного касания лапой отливки. Возможность независимой самоустановки двух подвижный лап (основной и дополнительной) гарантирует зажатие отливки минимум в двух точках. Это обеспечивает надежность работы манипулятора и исключает поломку 5 конвейера.
22
16
фиг. 2.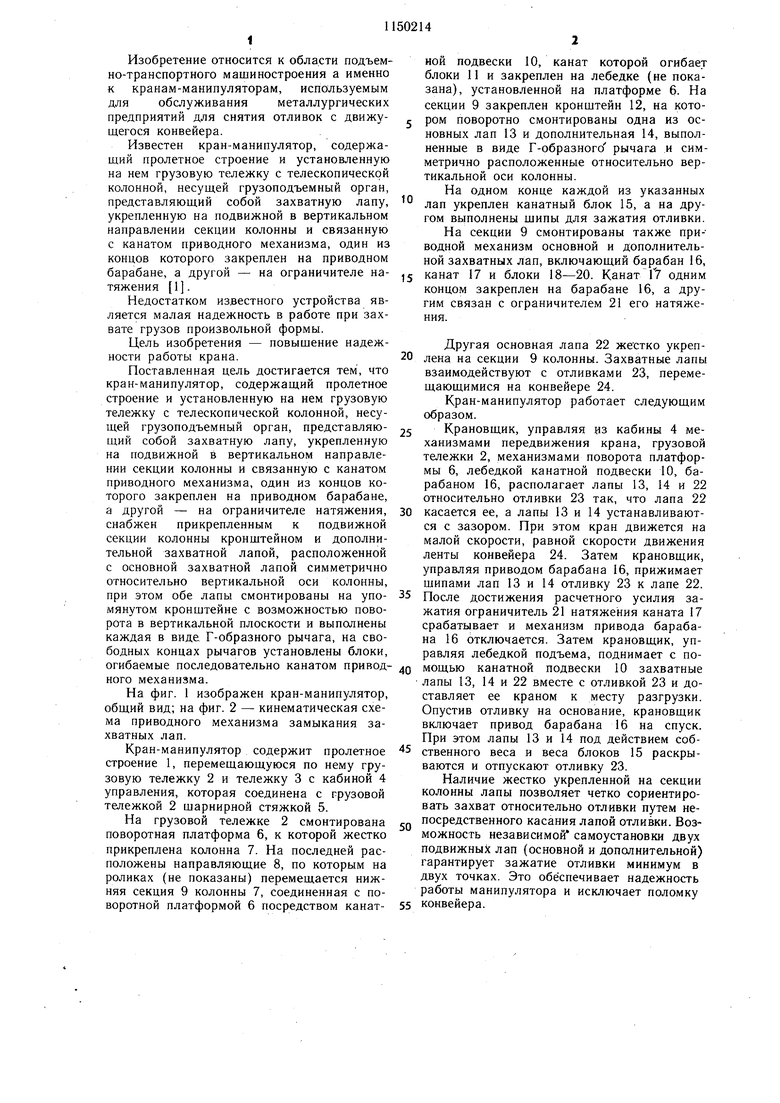
| название | год | авторы | номер документа |
|---|---|---|---|
| Кран мостового типа | 1980 |
|
SU893825A2 |
| САМОХОДНЫЙ ДВУХСТРЕЛОВОЙ КРАН | 2011 |
|
RU2465191C2 |
| Кран мостового типа | 1980 |
|
SU893826A2 |
| КРАН ДЛЯ ОБРАЩЕНИЯ С ОТРАБОТАВШИМ ЯДЕРНЫМ ТОПЛИВОМ В ЗАЩИТНОЙ КАМЕРЕ | 2007 |
|
RU2352516C1 |
| Кран мостового типа | 1977 |
|
SU652091A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ РАЗВОРОТЧИК-УСПОКОИТЕЛЬ РАСКАЧИВАНИЯ ГРУЗОЗАХВАТНОГО ОРГАНА | 1993 |
|
RU2048421C1 |
| Телескопический складской кран | 1975 |
|
SU662003A3 |
| Грузовая тележка крана | 1977 |
|
SU624870A1 |
| Захватное устройство для труб | 1986 |
|
SU1425165A1 |
| Мостовой кран | 1980 |
|
SU912625A1 |
КРАН-МАНИПУЛЯТОР, содержащий пролетное строение и установленную на нем грузовую тележку с телескопической колонной, несущей грузоподъемный орган, представляющий собой захватную лапу, укрепленную на подвижной в вертиУУ.-: -У -:У Фиг. кальном направлении секции колонны и связанную с канатом приводного механизма, один из концов которого закреплен на приводном барабане, а другой - на ограничителе натяжения, отличающийся тем, что, с целью повышения надежности работы, он снабжен прикрепленным к подвижной секции колонны кронштейном и дополнительной захватной лапой, расположенной с основной захватной лапой симметрично относительно вертикальной оси колонны, при этом обе лапы смонтированы на упомянутом кронштейне с возможностью поворота в вертикальной плоскости и выполнены каждая в виде Г-образного рычага, на свободных концах рычагов установлены, блоки, огибаемые последовательно канатом приводного механизма.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| 0 |
|
SU272191A1 | |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
