7 S в г 3 t « V/./J
а е
00
ю
S
t
Изобретение относится к горной промьшленности, а именно к устройствам для перемещения машин при ремонно-восстановительных и вспомогательных работах в рельсовых горных выработках.
Известен механизм подачи, которы включает два гидроцилиндра подачи, одним концом связанные с корпусом комбайна, а другим - с механизмом зацепления, имеющим гидроцилиндр зацепления и взаимодействующим с гладкой направляющей ll .
Механизм зацепления этой подачи перемещается только по гладкой направляющей, не имеющей выступающих элементов соединений и стыков. Кроме того, конструкция корпуса этого захвата .не позволяет проходить разветвления тяговых элементов, например, при перемещении платформы по рельсам.
Известен шагающий механизм перемещения горной машины, содержащий систему гидроцилиндров подачи, одни концом шарнирно соединенных с корпусом комбайна, а другим - с механизмом зацепления, имеющим захваты, взаимодействующие с круглой направляющей при опускании плунжера, упра ляемого гидродомкратом, вмонтированным в корпус механизма зацепления 2 .
Недостатком данного устройства является невозможность прохода направляющих с выступающими соединительными элементами корпуса механизма зацепления. Кроме того, малая величина зазора между захватом и направляющей не позволяет проходить выступающие стыки направляющих .
Цель изобретения - обеспечение возможности перемещения горной машины по рельсам, имеющим выступающие элементы стыковых соединений и разветвления нескольких рельсовых линий.
Указанная цель достигается тем, что в устройстве, включающем гидроцилиндр подачи, шарнирно соединенный однмм концом с корпусом машины, а другим - с механизмом зацепления, имеющим захваты, захваты механизма заце)1ления шарнирно закреплены на пластине, свободный конец которой вьтолнен в виде полузахвата, охватывающего удерживающую направляющую жестко соединенную с корпусом ма32010J
шины, яри этом захваты шарнирно соединены с гидроцилиндрами управления, которые шарнирно соединены с пластиной.
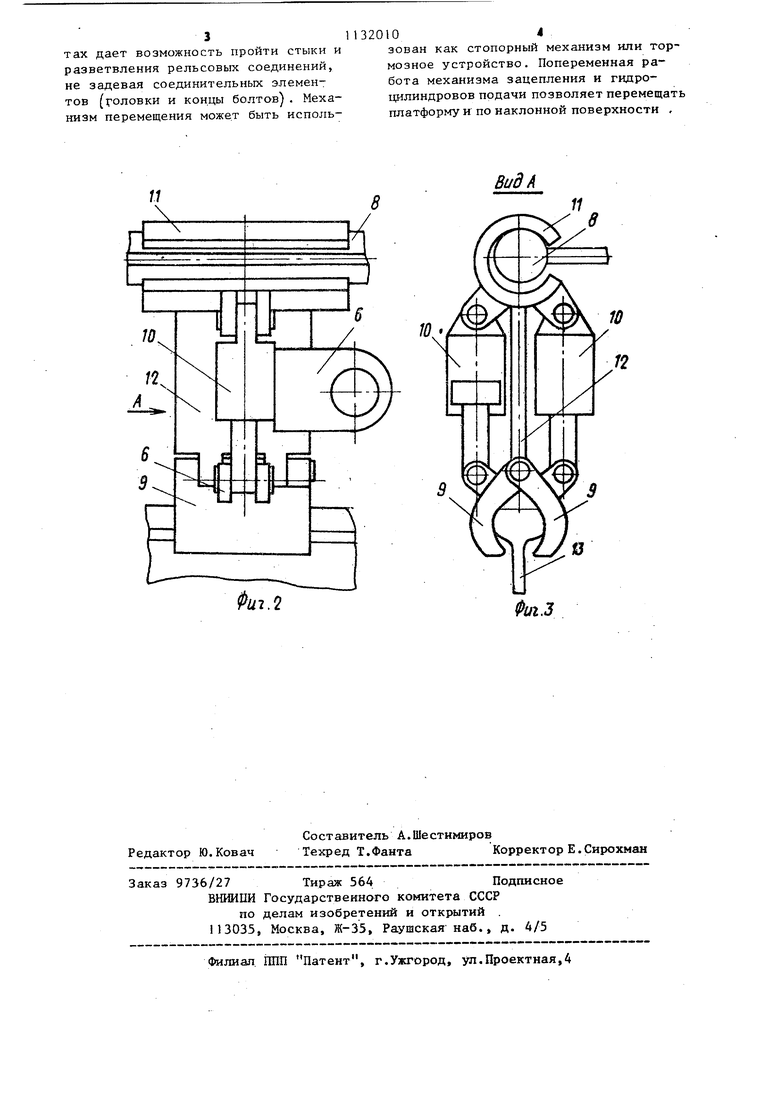
5 На фиг.1 изображен предлагаемый механизм перемещения, вид сбоку; на фиг.2 - механизм зацепленияна фиг.З - вид А на фиг.2.
Предлагаемый шагающий механизм 10 перемещения включает гидроцилиндр 1 подачи, который имеет шток 2 и поршень 3. Гидроцили одр подачи одним концом шарнирно соединен с проуши-. ной 4, которая жестко закреплена к (5 корпусу машины 5. Другой конец гидроцилиндра 1 шарнирно соединен проушиной 6 к механизму 7 зацепления. Механизм 7 зацепления взаимодействует с удерживающей направляющей 8, 20 прикрепленной к машине 5. Аналогичный механизм перемещения установлен с другой стороны машины .(не показан} Механизм зацепления состоит из за. хватов 9, управляемых гидроцилиндра25 ми 10, и полузахвата 11, который взаимодействует с направляющей 8. Полузахват соединен с захватами посредством гпастины 12. Тяговым органом шагающего механизма перемещения яв,„ ляются рельсы .13.
Механизм перемещения работает следующим образом.
Рабочая жидкость под давлением подается в поршневую полбсть гидроцилиндров 10 управления захватами. Захваты 9 обхватывают головку рельса ) 3 и создают упор для. сштового перемещения машины 5 гидроцилиндром 1 подачи. Например, для перемещения машины вправо рабочая жидкость подается в поршневую полость гидроцилиндра 1 подачи. Гидроцилиндр i подачи штоком 2, упираясь в механизм 7 зацепления, перемещает машину 5 вправо. При этом круглая направляющая 8, удерживая механизм зацепления от опрокидывания, также перемещается вместе с машиной 5. По мере достижения поршнем 3 крайнего положения рабочая жидкость подает50 ся в штоковую полость гидроцилиндра 1 подачи. Механизм зацепления вхолост ю перемещается по круглой удерживающей направляющей 8 и подтягивается к гидроцилиндру 1, подгота.в55 ливаясь к следующей подаче, и цикл повторяется.
Перемещение механизма зацепления по направляющей при раскрытых захва31132010
так дает возможность пройти стыки и эован как стопорный механизм или торразветвления рельсовых соединений, мозное устройство. Попеременная ране задевая соединительньк элемен- бота механизма зацепления и гидротов (головки и конды болтов) . Меха- цилиндровов подачи позволяет перемещать низм перемещения может быть исполь- платформу и по наклонной поверхности ,
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕЛЬСОПОДЪЕМНИК | 2007 |
|
RU2335594C1 |
| Добывающее устройство для горнодобывающих предприятий | 1978 |
|
SU1269742A3 |
| Устройство для ремонта железнодорожного пути | 1988 |
|
SU1650841A1 |
| Устройство для продольного перемещения рельсов железнодорожного пути | 1988 |
|
SU1830098A3 |
| КОМПЛЕКС ДЛЯ РЕМОНТА ГОРНЫХ ВЫРАБОТОК | 1995 |
|
RU2098632C1 |
| Транспортный комплекс | 1990 |
|
SU1788292A1 |
| КОМБАЙН ДЛЯ БУРЕНИЯ ВОССТАЮЩИХ | 1991 |
|
RU2007563C1 |
| Комплекс для подачи закладки в выработанное пространство | 1989 |
|
SU1693268A1 |
| Проходческий комбайн | 1980 |
|
SU981614A1 |
| Способ пластической гибки уложенных в пути рельсов в области сваренного стыка и установка для его осуществления | 1986 |
|
SU1466658A3 |
ШАГАЩИЙ МЕХАНИЗМ ПЕРЕМЕЩЕНИЯ ГОРНОЙ МАШИНЫ, включающий гидроцилиндр подачи, шарнирно соединенный одним концом с корпусом машины, а другим - с механизмом зацепления, имеющим захваты, отлйчающийс я тем, что, с целью обеспечения возможности перемещения горной машины по рельсам, захваты механизма зацепления шарнирно закреплены на пластине, свободный конец которой вьтолнен в виде полузахвата, охватывающего удерживающую направляющую, жестко соединенную с корпусом машины, при этом захваты шарнирно соединены с гидроцилиндрами управления, которые шарнирно соединены с пластиной. (Л
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| СПОСОБ ПРОИЗВОДСТВА СЛАБОСОЛЕНОЙ СЕЛЬДИ | 2003 |
|
RU2266657C2 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Сплав для отливки колец для сальниковых набивок | 1922 |
|
SU1975A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| МЕХАНИЗМ ПОДАЧИ ГОРНЫХ МАШИН | 0 |
|
SU360464A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
