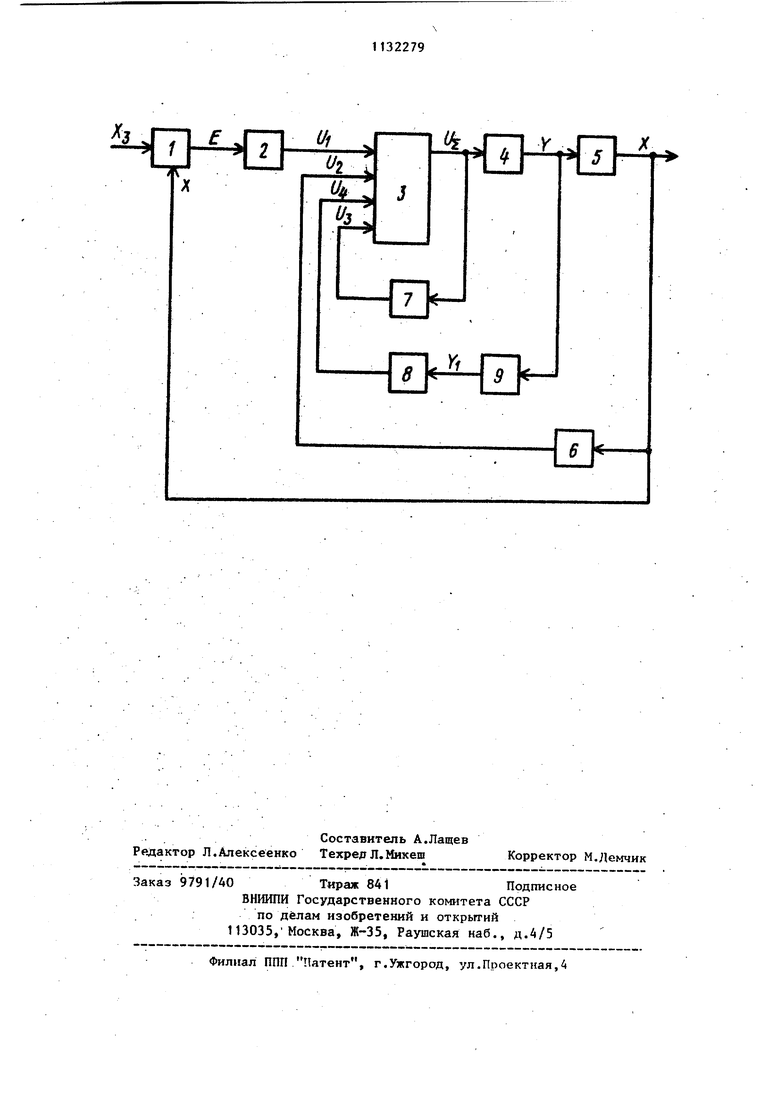
Изобретение относится к автоматике и может быть использовано при проектировании систем автоматического управления различными объектами с переменными параметрами. Известна система управления нестационарным объектом, обеспечивающая малую чувствительность динамичес ких, свойств к изменению параметров объекта, но не гарантирующая их малу чувствительность к помехам lj . Известна система управления неста ционарным объектом, позволяющая поддерживать заданные динамические свойства и устойчивость системы при изкененни в широких пределах парамет ров объекта управления, содержащая последовательно соединенные элемент сравнения, последовательное корректирующее устройство, суммирующий усили телЬэ исполнительное устройство, объект управления и первую модель корректирующего устройства, выход которой соединен с вторым входом суммирующего усилителя, третий вход суммирующего усилителя через вторую модель корректирующего устройства соединен с- выходом суммирующего усилителя, четвертый вход суммирующего усилителя через третью модель коррек тирующего устройства соединен с выходом исполнительного устройства, выход объекта управления соединен с инвертирующим входом элемента сравне . 1шя {Zj . Однако в известной системе не ими тируется уровень помех на входе в исполнительное устройство, что сужае .диапазон устойчивости движения мы в УСЛОВИЯХ действия интенсивных помех При наличии насьщения в исполнительном устройстве. Цель изобретения - минимизация уровня помех на входе в исполнитель ное устройство и расширение диапазо на устойчивости движения системы. Поставленная цель достигается тем, что в систему, содержащую после довательно соединенные элемент сравн ния, последовательное корректирующее устройство, суммирующий усилитель, исполнительное устройство, объект управления и первую модель корректирунщего устройства, выход которой соединен с вторым входом суммирующего усилителя, третий вход суммирукнце го усилителя через вторую модель последовательного корректирующего 1 9 . . 2 устройства соединен с выходом суммируйщего усилителя, выход объекта управления соединен с инвертирукщим входом элемента сравнения, дополнительно введены последовательно соединенные корректирующее устройство и модель объекта управления, выход которой соединен с четвертым входом суммирующего усилителя, а вход корректирующего устройства - с выходом исполнительного устройства. На чертеже представлена блок-схе- ма предлагаемой системы автоматичесского управления нестационарным объектом. . Система содержит последовательно соединенные элемент 1 сравнения, последовательное корректирующее устройство 2, суммирующий усилитель 3, исполнительное устройство 4, объект 5 управления и первую модель 6 корректирующего устройства, выход котррой соединён с вторым входом сумми-. рующего усилителя, третий вход суммирующего усилителя через вторую модель 7 последовательного корректирующего устройства соединен с выходом суммирующего усилителя, четвертый ход суммирующего усилителя через последовательно соединенные модель 8 объекта управления и корректирующее устройство 9 соединен свыходом исполнительного устройства, а выход объекта управления соединен с инвертирующим входом элемента сравнения. Система работает следующим образом . Задающее воздействие Хд поступает на вход элемента 1 сравнения. С выхода элемента сравнения сигнал рассогласования Е поступает на вход последовательного корректирзтощего уст 1рйства 2 с постоянными параметрами, котороё вьтолнено, например, в виде блока интеграторов. С выхода- последовательного корректирующего устройства сигнал и поступает на вход суммирующего усилителя 3. С выхода суммирующего усилителя сигнал U с-поступает на вход исполнительного устройства 4. С вькода исполгштельного устройства сигнал Ч поступает на вход нестационарного объекта 5 управления. С вькода объекта управления сигнал X поступает на инвертирующий вход элемента сравнения, а также на вход первой модели 6 последовательного корректирующего устройства с .постоянными параметрами,, которая виде блока выполнена, например, в интеграторов. С вькода модели последовательного корректирующего устройства сигнал U поступает на второй вход сз ммируницёго усилителя. Сигналите выхода суммирующего усилителя поступает также на вход второй модели 7 последовательного корректирующего устройства с постоянными параметрами, выполненной, например, в виде блока интеграторов. С выхода второй модели последователь ного корректирующего устройства сигнал и а поступает на третий вход суммирующего усилителя. На четвертой . вход суммирующего усилителя поступае сигнал и с выхода модели 8 объекта управления с постоянными параметрами вьшолненной, например, в виде блока интеграторов. На. вход юдели объекта управления поступает сигнал Y с выхода корректирунмцего устройства 9 с -постоянными параметрами, выполненного, например, в виде блока интеграторов. На вход корректирующего устройства 9 поступает сигнал Y с выхода исполнительного устройства. Введение в предлагаемую систему управления модели 8 объекта управления корректирующего устройства 9 позволяет формировать управлянщий сигнал Uj таким образом, чтобы минимизировать его дисперсию при. действии высокочастотных помех, поступающих с вькода нестационарного объекта 5 управления , При этом число степеней свободы последовательного корректирующего устройства 2 выбирается в зависимости от числа степеней свободы исполнительного устройства 4 и объекта 5 управления. Пусть объект 5 управления и исполнительное устройство 4 описывают.ся соответственно дифференциальными уравнениями (° 4 р-11 .Пи-д i: р - оператор дифференцирования; Ц,с - константы. Уравнение суммирукяцего усилителя 3 .ilU.-Ug-U -U). 794 Тогда последовательное корректирукщее устройство 2 описывается дифференциальным уравнением -n«-i j4 -2 pip « 10 201Х5-Х1, гдеы,, константы, обеспечивающие устойчивость последовательного корректирующего устройства 2. Первая и вторая модели 6 и 7 последовательного корректирукмцего устройства описываются при этом соот- ветственно дифференциальными зправне-; ниями : I nKu-o- Д -,„ Р % 0«РНР J (P%|,.fl(p - «-v|:-.,.f, bsp.Модель 8 объекта управления описывается дифференциальным уравнением .koconet; . а корректирукщее устройство 9 - описьпвается уравнением Пу-Г)о-2 (р .Р. При этом дифференциальное уравнение, описывающее движение в замкнутой системе, имеет вид U(plx kjj«,,«jjC,k(tn,, (,) 4р)){р..-.,., .(.:с,л,.„С:г, „ .рЦр:%|„ь,р),,р )(.р)к„.,р,,р .,,p-.c,k,,). С-Кс1,«,(г) , ns Sj W +А tAn.,. (t1A;..,.,U(t)A;v Здесь.А, fll , А. - константы, ц n,t Поскольку дифференциальное уравнение (О не имеет производных в равой части,то динамические свойства истемы определяются его левой частью.
Величина дисперсии сигнала на входе в исполнительное устройство
.«,«,,,(iu,)( где )- спектральная плотность поме хи. Известно, что для достижения мини мально возможной величины дисперсии на входе в исполнительное устройство определяемой выражением (2), необходимо выбирать минимальные значения коэффициентов полинома - (р), при которых обеспечиваются заданные динамические свойства системы в режиме управления. Для этого необходимо иметь возмож ность независимо формировать по край ней мере и ни коэффициентов, а именно Л „., , ..., п..,, - (-%-V,A; ,. , А,всего п t А. .. - и . ; п +1). Такая возможность всего п появляется при «1,1 (3) путем обеспечения желаемых значений коэффициентов А - всего (Пки +1), Г, - всего Hiiu всего Яри вьшолнении равенства в выражении (3) желаемьте значения коэффициентов Л , , могут быть найдены однозначно из системы линей ных уравнений
(При действии помехи с выхода объектд управления
(2)
1
5CuU(j, где А - вектор размерности ( ), элементами которого являются минималь но возможные значения коэффициентов А; , А , Д полинома и (р), которые с одной стороны обеспечивают желаемые динамические свойства системы в режиме управления, а с другой минимизацию уровня помех на входе в исполнительное устройство; , М - квадратная матрица, элементы которой определяются заданными значениями коэффициентов ti- о г-з ct) .о 3 К - вектор искомых коэффициентов ,Л. При этом определитель матрицы W отличен от нуля. В этих условиях система (4), всегда имеет единственное решение. Таким образом, предлагаемая сис-тема автоматического управления нестационарным объектом позволяет минимизировать уровень помех на входе в исполнительное устройство и добиться расширения диапазона устойчивости движения системы, обеспечивая при этом требуемые динамические свойства системы в режиме управления при изменении параметров объекта управле1шя в широких пределах.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления нестационарным объектом | 1984 |
|
SU1265693A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ МНОГОМЕРНЫМ НЕСТАЦИОНАРНЫМ ОБЪЕКТОМ1^ГНЛ"ФОВД | 1972 |
|
SU429642A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМ ОБЪЕКТОМ | 1991 |
|
RU2039371C1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМ ОБЪЕКТОМ | 2002 |
|
RU2230350C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ПО УГЛУ КРЕНА | 2018 |
|
RU2691510C1 |
| Система управления | 1983 |
|
SU1120283A1 |
| СПОСОБ ГРУБОГО УПРАВЛЕНИЯ ПРОСТРАНСТВЕННЫМ ДВИЖЕНИЕМ САМОЛЕТА И СИСТЕМА ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2587773C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА | 1996 |
|
RU2111521C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМ ОБЪЕКТОМ | 1999 |
|
RU2150728C1 |
| СПОСОБ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА ПО УГЛУ КРЕНА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2564936C1 |
СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМ ОБЪЕКТОМ, содержащая последовательно соединенные элемент сравнения, последовательное корректирующее устройство, суммирующи усилитель, исполнительное устройство, объект управления и первую модель корректирующего устройства, выход которой соединен с вторым входом суммирующего усилителя, третий 1вход суммирующего усилителя через вторую модель последовательного корректирующего устройства соединен с выходом суммирующего усилителя, выход объекта управления соединен с инвертирующим входом элемента сравнения, отличающаяся тем, что, с целью минимис зации уровня помех на входе в ис« пол1штельное устройство и раситрения (П С диапазона устойчивости движения системы, в нее введены последовательно соединенные корректирующее устройство и модель объекта управления, выход которой соединен с четвертьп входом суммирующего усилителя, а вход кор. ректирующего устройства - с выходом исполнительного устройства.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| К анализу одного класса линейных существенно нестационарных систем автоматического управления космических летательных аппаратов типа ВКС на конечном этапе спуска | |||
| Сб | |||
| Навигация | |||
| Наведение и оптимизация управления Труды VII Международного симпозиума ИФАК в Роттах-Эгерн, Наука, 1978, с | |||
| Аппарат, предназначенный для летания | 0 |
|
SU76A1 |
