tc
Од
сл
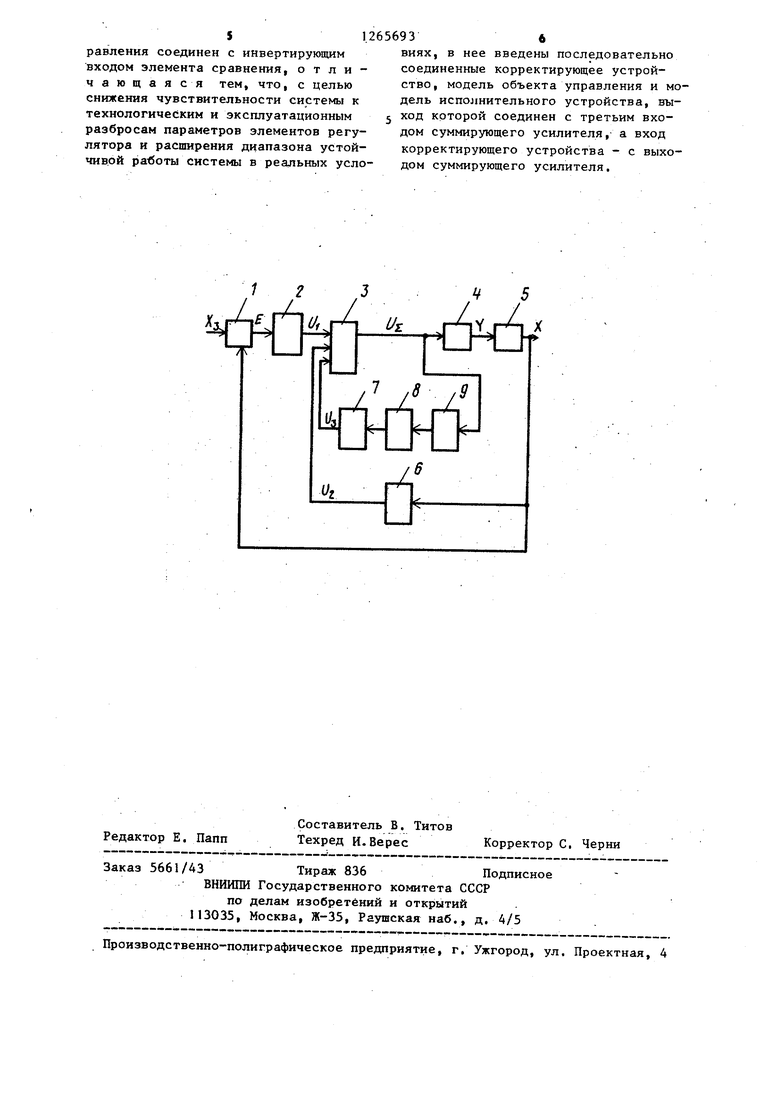
О5. СО 00 Изобретение относится к автоматике и может быть использовано при проектировании- систем автоматического управления различными объектами с переменными параметрами. Цель изобретения - снижение чувствительности системы к технологическим иэксплуатационным разбросам параметров элементов регулятора и расширение диапазона устойчивой работы системы в реальных условиях. На чертеже представлена блок-схема системы автоматического управления нестационарным объектом. Система содержит элемент 1 сравнения, последовательное корректирующее устройство 2, суммирующий усилитель 3, исполнительное устройство 4, объект 5 управления, модель 6 корректирующего устройства, модет 7 исполнительного устройства, модель 8 объек та управления, корректирующее устройство 9. Элемент 1 сравнения, по-следовательное корректирующее устройство 2, суммирующий усилитель 3, исполнительное устройство 4, объект 5 управления и модель 6 корректирующего устройства соединены последовательно, выход блока 6 соединен с вторым входом суммирующего усилителя 3, третий вход суммирующего усилителя через по следовательно соединенные модель 7 исполнительного устройства, модель 8 объекта управления и корректирующее устройство 9 соединен с выходом суммирующего усилителя, а выход объекта управления соединен с инвертирующим входом элемента срайнения. i , Система работает следующим образом. Задающее воздействие Х. поступает на вход элемента 1 сравнения, С вы хода элемента сравнения сигнал рассогласования поступает на вход после довательного корректирующего устройства 2 с постоянными параметрами, которое выполнено, например, в виде блока интеграторов. С выхода последовательного корректирующего устройства сигнал и поступает на вход сум мирующего усилителя 3, С выхода суммирующего усилителя сигйал U поступает на вход исполнительного устройства 4, С выхода исполнительного устройства сигнал Y поступает на вхо нестационарного объекта 5 управления, С выхода объекта управления сигнал X поступает на ин-вертирующий вход элемента сравнения, а также на вход модели 6 последовательного корректирующего устройства с постоянными параметрами, которая выполнена, например, в виде блока интеграторов, С выхода модели последовательного корректирующего устройства сигнал U поступает на второй вход суммирующего усилителя. На третий вход суммирующего усилителя поступает сигнал и с выхода модели 7 исполнительного устройства с постоянными параметрами, выполненной, например, в виде блока интеграторов. На вход модели исполнительного устройства поступает сигнал Z с выхода модели 8 объекта управления с постоянными параметрами, выполненной, например, в виде блока интеграторов. На вход модели объекта управления поступает сигнал Z с выхода корректирующего устройства 9 с постоянными параметрами, выполненного, например, в виде блока интеграторов. На вход корректирующего устройства 9 поступает сигнал Uj. с выхода суммирующего усилителя. Введение блоков 7-9 позволяет при формировании значений коэффициентов карактеристического полинома замкнутой системы, требуемых для минимизации уровня помех на входе в исполнительное устройство и обеспечения заданных динамических свойств в режиме управления, избежать введения внутренних положительных обратных связей. Тем самым обеспечивается малая чувствительнос.ть системы к технологическим и эксплуатационным разбросам параметров элементов регулятора и.расщирение диапазона работы системы в реальных условиях. Пусть объект 5 управления и исполнительное устройство 4 описываются соответственно дифференциальными уравнениями X(t) K(t1 Y(t), Y(tbc;U(t), С.П, где Р - оператор дифференцирования. константы. Уравнение суммирующего усилителя Ug(t)K и, (t)-U,(t)-U, (t) . Тогда последовательное корректирующее устройство 2 описывается дифференциальным уравнением 312 ,,(t) o«.,Xj(t)-X(t). о( М, где d - константы,обеспечивающие устойчивость последовательного корректирующего устройства 2. Модель последовательного корректирующего устройства 6 описывается при.этом дифференциальным управление . . ё:,.. p-u(t)gbp-x(t). Модель 7 исполнительного устройства и модель 8 объекта управления описыйаются соответственно дифференЦиальными уравнениями У С. Р и„ (t)c Z (t) ; С ZI b. р. Z (t)K - Z (t, к const ТГ 0 о 1 о а корректирующие устройство 9 V . , о (4) + i ьо 5 . При этом дифференциальное уравнение, описывающее движение в замкну, той системе, имеет вид й(Р)-X(t)K ру K(t) X j(t) , , , JSI 1 J V TTj - - -° ° „ , V ( ° tf-TT CV о Kft) у- А о . Р +А ...+А + - t-iKv i +K(t)A IP +IA + +K6t)X 1 X +ГА+ 1 +K(t)A P-fK(t)A . Здесь +п ; А , А- - const, , п-1, 1J Поскольку дифференциальное уравнение (1) не имеет производных в правой части, то динамические свойства системы определяются его левой ча. (О 34 стью. При этом желаемые- значения коэффициентов А, А, Aj А , обеспечивающие с одной стороны требуемые динамические свойства системы в режиме управления, а с другой стороны минимально возможную при этом величину дисперсии сигнала на входе в исполнительное устройство, достигаются независимо друг от друга при следую однозначном выборе коэффициентов К , ,Л : . i 0- ку-г ° b ) гГ j7 ,г - При этом найденные значения К , , очевидно суть положительные числа, а значения Л„ всегда могут быть сделаны тaкoвы D за счет выбора о1-, 3™ соответствует наличию в системе ЛИШЬ отрицательных внутренних обратных связей, что и обеспечивает малую чувствительность системы к технологическим и эксплуатационным разбросам параметров элементов регулятора. Таким образом, система автоматического управления нестационарным объектом позволяет обеспечить малую чувствительность к технологическим и эксплуатационным разбросам параметров элементов регулятора. По сравнению с известной расширение диапазона устойчивой работы предлагаемой системы в условиях параметрических BOSf мущений регулятора достигает 10-15 раз. При этом минимизируется уровень помех на воде в исполнительное устройство и обеспечиваются требуемые динамические свойства системы в режи управления при 11зменении параметров объекта в щироких пределах. , Формула изобретения Система автоматического управления нестационарным объектом, содержащая последовательно соединённые элемент сравнения, последовательное корректирующее устройство, суммирующий усилитель, исполнительное устройство, объект управления и модель корректирующего устройства, выход которой соединен с вторым входом суммирующего усилителя, выход объекта уп-г S1. равления соединен с инвертирующим входом элемента сравнения, отличающаяся тем, что, с целью снижения чувствительности системы к технологическим и эксплуатационным разбросам параметров элементов регулятора и расширения диапазона устойчивой работы системы в реальных уело 2 936 ВИЯХ, в нее введены последовательно соединенные корректирующее устройство, модель объекта управления и модель исполнительного устройства, ныход которой соединен с третьим входом суммирующего усилителя, а вход корректирующего устройства - с выходом суммирующего усилителя.
Изобретение относится к системам управления нестационарным динамическим объектом. Цель изобретения снижение чувствительности и расширение диапазона устойчивой работы в реальных условиях. Поставленная цель достиг.ается тем, что система управления содержит последовательно соединенные корректирующее устройство, модель объекта управления и модель использования устройства. 1 ил.
/
Щ
Uf
г I
/./
| Система автоматического управления нестационарным объектом | 1982 |
|
SU1132279A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Колосниковая решетка с чередующимися неподвижными и движущимися возвратно-поступательно колосниками | 1917 |
|
SU1984A1 |
