S
19
15
СО 00 ISO
.4
i/г./
Изобрстеннс относится к водному транспорту леса и предназначено для торможения плотов в пути следования и остановки в конечных пунктах.
Известен гидродинамический тормоз для остановки плота, содержащий гибкое полотнище, укренленное на вертикально установленных ци;1индрических поплавках, У-образную Н1арнирнук) балансирную раму, тросовые тяги и механизм управления 1.
Однако известный тормоз не обеспечивает качественное регулирование торможения и не создает значительных усилий торможения, а также требует значительной метал.юемкости поплавка.
Це.ль изобретения --- улучщение регулирования и повьщ1ение усилия торможения, а также снижение металлое.мкости поплавков.
Поставленная цель достигается тем, что гидродинамический тормоз для остановки плота, содержаний гибкое полотнище, укрепленное на вертикально установленных цилиндрических поплавках, V -образную Н1арнирную балансирную раму, тросовые тяги и механизм управления, снабжен тормозными щитами, закрепленными на щарнире У-образной баланеирной рамы и соединенными тросовыми тягами с механизмом управления, а указанные поплавки выполнены с противовесом, нри этом гибкое гюлотпипю и тормозные щиты снабжены стабилизирующими решетками с жалюзи.
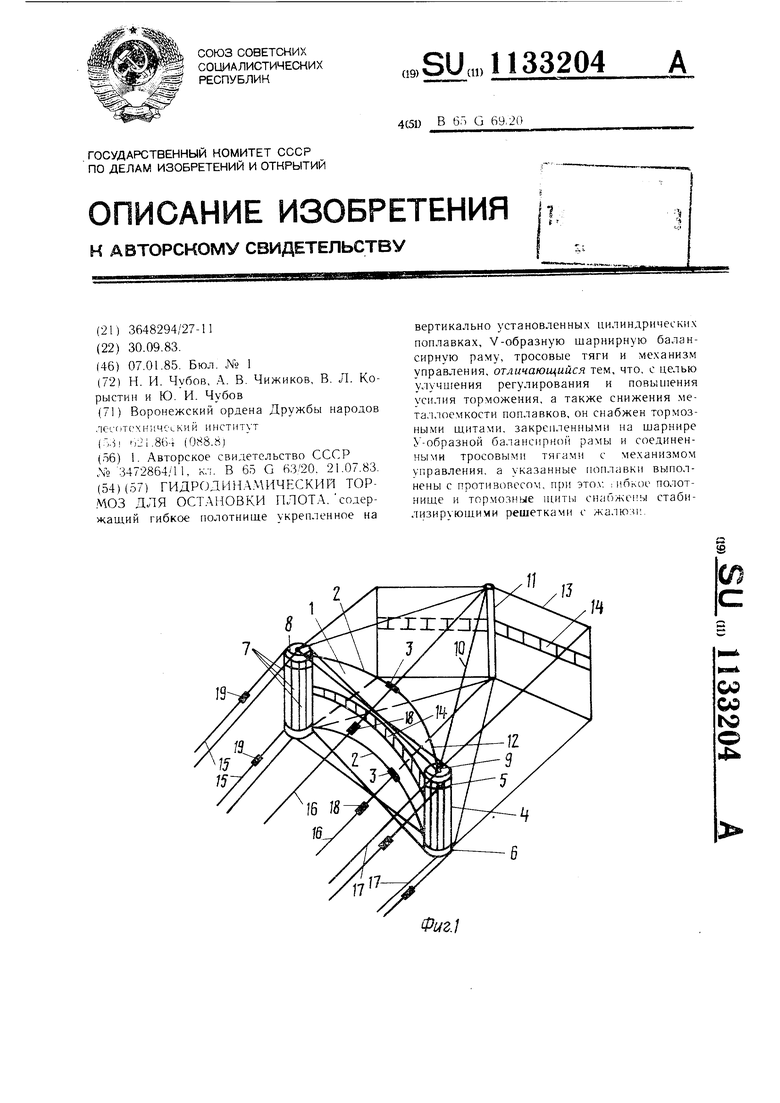
На (jnii 1 изображен гидродинамический тормоз в рабочем положении; на фиг. 2 - то же, в транспортном положении.
Гидродинамический тормоз для остановки плота содержит |-ибкое полотнище 1 с несущими элемеп.тами 2, например канатами, разме1пенными по крайней мере по верхней и нижней eiO кромкам и снабженными направляющими 3, вертикально установленные 1оплавки 4, состоящие из наплавной части 5 и противовеса 6, соединенных между собой элеме1 тами 7. например стержнями, с барабанами 8, насаженными на оси 9, У-образную шарнирную балансирную раму, выполненную из плоских стержневых ферм 10, соединенных шарниром 11, с расположенными на пих фиксаторами 12, тормозные щиты 13 со стабилизирующ.ими решетками с жалюзи 14 и тросовые тяги 15-17 с ограничительными муфтами 18 и 19.
Поплавки 4 выполнены составными из наплавной части 5, изготовляемой из любого плавучего материала, и противовеса 6, в качестве которого могут быть использованы и неметаллические материалы. Наплавную часть 5 и противовес 6 соединяют жесткими и.чи гибкими связя.ми, например канатами или стержнями 7. Расположение стержней 7 можно осуществлять по любой схеме, например по окружности, многоугольнику, эллипсу.
У-образная шарнирная балансирная рама предназначена для удержания поплавков 4 в вертикальном положении, раскрытия и обеспечения устойчивости на курсе гидродинамического тормоза. Ofia подвижно соединена свободными кромками и осями 9 Ю образующим поплавков 4, а другими - шарниром 1, на котором подвижно з;;креплены тормозные щиты 13. V-образная рама может быть изготов,1ена из любого материала, обладающего плавучестью, например древесины.
Несущие элементы 2, например канаты, служат для повышения надежности работы тормоза, воспринимая часть нафузки от давления воды на i-ибкое полотнище 1 (усилие торможения), и передачи ее посредством тормозных тяг 5 и 17 такелажу плота, затормаживая последний.
Количество и схема размещения несущих элементов 2 зависит от ве.гичины усилия торможения, прочности и габаритов гибкого полотнища.
Барабаны 8 служат для вращения поп5 лавков 4 вокруг осей 9 при взаимодействии с тросовыми тягами 15. При этом гибкое полотнище 1 разматывают (растягивают) или наматывают на поплавки, приводя тем самым тормоз в рабочее или транспортное положение соответственно, а поп0 лавки раздвигают или сближают.
Тросовые тяги 15 с ограничительными муфтами 19 совместно с тросовыми тягами 16 служат для приведения тормоза в рабочее и транспортное положения, передачи усилия торможения такелажу п.лота
и жестко одними концами закре 1лены на -образной раме (или яа осях 9 ноплавков 4), огибая двумя-тремя витками противоположно расположенные барабаны 8. а дру|ими соединены с механизмом управления и такелажем плота.
Тросовые тяги 16 с ограничительными муфтами 18 служат для приведения тормоза в рабочее и транспортное положения,
5 coeди eны е шарниром 1 f-образь:ой баланеирной рамы и плотом, прсхходят под несущими элементами 2, поддерживая их и взаимодействуя с размещенными на них направляющими 3. предназначенны.ми для снижения износа тросовых 5 и несу;цих
0 элементов 2.
Ограничительные муфты 9 тросовых тяг 15 предназначены д.пя регулирования усилия торможения путем изменения угла раскрытия тормоза, тем самым изменяя
площадь любого сопротнв.юния (.миделя последнего. Устапавлипаюг .муфты 19 с четом необходимСГО тормогтого усилия, О ;ределяемого расчетным путем или п.о аналога.м плотов бассейна.
Ограничительные муфты 18 тросовых тяг 16 предназначены для открывания фиксаторов 12, осуществляемого при перемещении щарнира 11 в направлении к плоту при создании усилия торможения в тросовых тягах 16. Ограничительные муфты 18 тросовых тяг 16 размещают между шарниром 11 и направляющими 3 вблизи последних.
Фиксаторы 12 служат для исключения спонтанного раскрытия и обеспечения устойчивости на курсе тормоза при его транспортировке.
Тормозные щиты 13 предназначены для создания дополнительного усилия торможения без увеличения габаритов гибкого полотнища, снабжены стабилизирующими рещетками с жалюзи 14, служащими для исключения ударных нагрузок в такелаже плота, возникающих при включении (раскрытии) щитов в работу, и закреплены подвижно на щарнире 11У-образной балансирной рамы. Тормозные щиты 13 могут быть жесткими и гибкими, например из древесины или гидрофобных тканевых материалов.
Тросовые тяги 17 служат для приведения тормозных щитов 13 в рабочее и транспортное положения, передачи усилия торможения такелажу плота и жестко прикреплены к тормозным щитам 13.
Устройство работает следующим образом.
В транспортном положении гибкие полотнище 1 намотано на поплавки 4, а последние размещены параллельно один возле другого. При этом в тросовых тягах 16 усилие поддерживают минимальным (которое может отсутствовать полностью), а тросовыми тягами 15 и 17 осуществляют транспортировку (подачу) тормоза к плоту. Транспортировку тормоза можно осуществлять и тягами 16.
В рабочее положение из транспортного тормоз приводят, создавая усилия натяжения в тросовых тягах 16 и одновременно ослабляя (стравливая) тросовые тяги 15 и 17
При этом муфты 18 тросовых тяг 17, перемещаясь в направлении к плоту, открывают фиксаторы 12, а плоские фермы У-образной балансирной рамы поворачиваются вокруг движущегося в том же направлении щарнира 11 и разводят закрепленные на их концах поплавки 4 в противоположные от тросовой тяги 16 стороны, приводя поплавки во вращательное движение, тем самым разматывая (растягивая)
гибкое полотнище 1, занимающее рабочее положение. Разматыванию гибкого полотнища 1 и раздвижению поплавков 4 способствует и давление воды на гибкое полотнище, что создает усилие торможения, передаваемое тросовыми тягами 15-17 такелажу плота.
Угол раскрытия У -образной балансирной рамы, определяющий величину усиЛИЯ торможения, регулируют ограничительными муфтами 19. а динамику в такелаже плота (плавность включения ) - режимом раскрытия тормоза (экстренно, умеренно, медленно).
В транспортное положение гидродинамический тормоз приводят, снижая усилие в тросовых тягах 16 и создавая при этом усилия натяжения в тросовых тягах 15 и 17. Этим самым поплавки 4 перемещают (сближают) навстречу один другому (к
0 тросовым тягам 16), закрывая -образную балансирную раму до замыкания (сработки) фиксаторов 12. При этом тросовые тяги 15, огибающие барабаны 8, приводят во вращательное движение поплавки 4 вокруг осей 9, в результате чего гибкое полотнище I наматывают на поплавки 4.
Тормозные щиты 14, в транспортном положении прижаты к плоским фермам 10, что достигается натяжением тросовых тяг 17. - В рабочее положение из транспортного тормозные щиты 13 приводят под действием давления воды при ослаблении (стравливании) тросовых тяг 17 и движении тормоза (при необходимости тормозные щиты можно разводить принудительно, оснастив их до5 полнительными тормозными тягами).
В транспортное положение тормозные щиты 13 приводят, создавая усилии натяжения в тросовых тягах 17.
Тормозные щиты 13 можно приводить в рабочее положение оба одновременно или автономно каждый в отдельности при транспортном и рабочем положениях гибкого полотнища 1.
Предлагаемая конструкция гидродинамического тормоза позволяет плавно 5 регулировать и повысить усилие торможения без из.менения габаритов гибкого полотнища и снизить металлоемкость поплавков путем применения тормозных щитов и составных поплавков соответственно, а также исключить ударные нагрузки в системе плот-тормоз, снизить энергоемкость, предохранить гибкое полотнище от повреждений при транспортировке тормоза.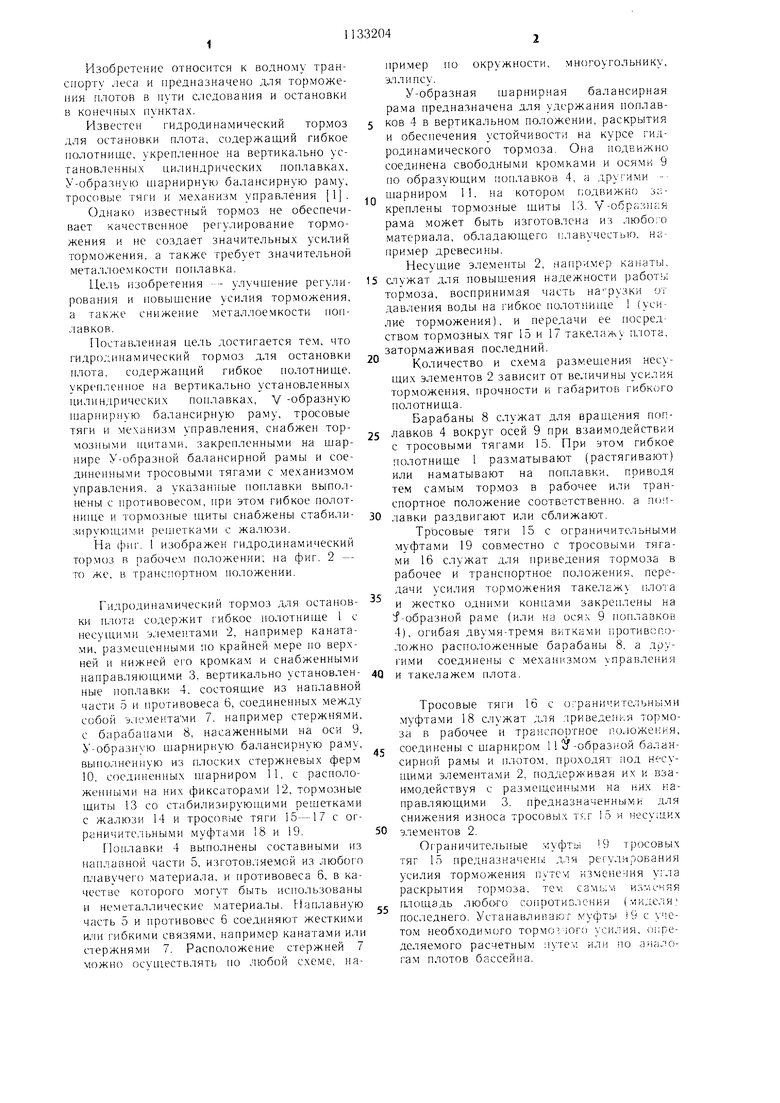
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидродинамический тормоз для остановки плота | 1982 |
|
SU1079572A1 |
| Гидродинамический тормоз для остановки плота | 1983 |
|
SU1123972A1 |
| Гидродинамический тормоз для остановки плота | 1982 |
|
SU1046189A1 |
| Гидродинамический тормоз для остановки плота | 1981 |
|
SU965902A1 |
| Гидродинамический тормоз для остановки плота | 1989 |
|
SU1705214A1 |
| Гидродинамический тормоз для остановки плота | 1981 |
|
SU994342A1 |
| Гидродинамический тормоз для остановки плота | 1982 |
|
SU1008127A1 |
| Плот | 1989 |
|
SU1632902A1 |
| ГИДРОДИНАМИЧЕСКИЙ ТОРМОЗ ДЛЯ ОСТАНОВКИ ПЛОТА | 2011 |
|
RU2457979C1 |
| Плот | 1983 |
|
SU1123973A1 |
ГИДРОДИНА.МИЧЕСКИЙ ТОР.МОЗ ДЛЯ ОСТАНОВКИ ПЛОТА.содержащий гибкое полотнище укрепленное на вертикально установленны.ч цилиндрически.х поплавках, V-образную шарнирную балансирную раму, тросовые тяги и механизм управления, отличающийся тем, что, с целью улучшения регулирования и повышения усилия торможения, а также снижения металлоемкости поплавков, он снабжен тормозными ш.итами, закрепленными на шарнире У-образной баланспрной рамы и соединенными тросовыми тягами с ме.ханизмом управления, а указанные поплавки выполнены с противовесом, п)и это,: i и.бкое полотнише и тормозные щиты снабжен-, стабилизируюшими решетками с жалюз;;.