Изобретение относится к лесной промышленности, а именно к водному транспорту леса и может быть-использовано для остановки плотов в пути следования и конечных пунктах. Известен гидродинамический тормоз для остановки плота, содержащий гибкое полотнище парашюта, закрепленное одним концом к поворотному на оси поплавку, а другим - к горизонтально балке,, и тросовые тя:ги управления и транспортирования поплавка 1. Недостаток этого тормоза заключается в том, что он требует, значитель ных энергозатрат и не предохраняет парашют от повреждения. Цель изобретения - снижение энергозатрат и предохранение парашюта от повреждений путем транспортирования его в нерабочем положении на поверхности поплавка. Указанная цель достигается тем, что в гидродинамическом тормозе для остановки плота, содержащем гибкое полотнище парашюта, закрепленное одним концом к поворотному на оси поплавку, а другим - к горизонтальной балке, и тросовые тяги управления и транспортирования поплавка, последний выполнен в виде эллиптического цилиндра, на передней части которого установлены узлы крепления полотнища парашюта и тросовых тяг управления поплавком, а на задней - ограничительная балка, при .этом на ори вращения поплавка жестко закреплена П-образная рама с направляющими дтуг тросовых тяг управления поплавком, / а площадь полотнища парашюта не превышает половины площади боковой поверхности цилиндра. На фиг.1 изображен гидродинамичес кий тормоз, транспортное положение, на фиг. 2 - то же, рабочее положение, на фиг.З - то же, вид в плане, на фиг.4 - разрез А-А на фиг.1. Гидродинамический тормоз для оста новки плота содержит поплавок 1, выполненный в виде эллиптического цилиндра, гибкое полотнище парашюта 2, закрепленное одним концом к поплавку 1,. а другим - к горизонтальной балке 3, тросовые тяги управления 4 и 5 и транспортирования 6, с расположенными на последних демпферами 7 и ограничительными муфтами 8, П-образную раму 9 с направляющими 10 для тросовых тяг 4 управления, жестко закрепленную на оси 11 вращения с поплавком, через которую пропущена тяга. 6 транспортирования. На передней части эллиптического. цилиндра размещены узлы 12 крепления тросовых тяг 5 управления и ограничи тельная балка 13, а на задней - огра ничительная балка 14. По торцам эллиптического цилиндра выполнены скосы-обтекатели 15, пре дназначенные для снижения сопротивления (энергозатрат) воды при транспортировании тормоза. Тросовые тяги управления 4 прикреплены к горизонтальной балке 3. Демпферы 7 тросовой тяги 6 транс- ; портирования служат для снижения динамических нагрузок на такелаж плота, а ограничительные муфты 8 и ограничительные балки 13 и 14 - для стабилизации положения поплавка 1. Причем ограничительную балку 13 устанавливают при суровом приветро-волновом режиме работы тормоза. П-образная рама 9 служит для направления создаваемого усилия в тросовых тягах 4, создания и регулирования величины момента сил вращения поплавка 1, а размещенные на ней направляющие 10 могу.т быть по принципу действия опорами скольжения или качения. Гидродинамический тормоз работает следующим образом. В транспортном положении гибкое полотнище парашюта2 расположено на поверхности поплавка I, а П-образная рама 9- находится под ним в воде. Тормоз перемещается за одну из тросовой тяги б транспортировани.1 ТТрй этом одна из ограничительных муфт 3 упирается в ось 11 вращения поплавка 1 и последний устанавливают параллельно направлению движения. Таким расположением тормоза в сочетании со скосами-обтекателями снижают сопротивление воды, а следовательно, энергозатраты при его транспортировании. В рабочее положение тормоз приводят, развернув его из транспортного положения на 90 и установив перпендикулярно к направлению движения плота, к которому закрепляют тросовые тяги управления 4 и 5 и транспорТирования б, затем ослабляют (стравливают) тросовые тяги 5 управления и одновременно создают усилие в тросовых тягах 4 управления,, прикрепленных к горизонтальной балке 3. При этом тросовые тяги 4 взаимодействуют с напра&ляющими. 10 П-образной рамы 9, тем самым создавая момент сил, которым поворачивают поплавок 1 вокруг оси 11 вращения с гибким полотнищем парашюта 2, и приводят тормоз в рабочее положение. Дополнительный момент сил вращения создается от действия гравитационных сил горизонтальной 3 и ограничительной 14 балок, а также гибкого по.яотнища параипота 2. Гидродинамическое давление (усилие торможения} воды на полотнище парашюта 2 передают посредством тросовых тяг 4 и б такелажу плота, затормаживая и останавливая его, а. для плавности возрастания нагрузок в тягах 6 установлены демпферы 7 (гидрав лические, механические или др.) . При рабочем положении тормоза П-образная рама 9 занимает вертикаль ное положение, размещаясь над поплав ком 1 и приподнимая тросовые тяги 5 управления. В транспортное положение тормоз устанавливают, создавая усилия в тро совых тягах 5 управления и ослабляя тросовые тяги 4, тем самым поворачивают поплавок 1 в обратном направлении чем для рабочего положения и укладывают гибкое полотнище парашюта 2 на боковую поверхность эллиптического цилиндра поплавка 1, а П-образную раму 9 погружают в воду под него, которая отводит тросовые тяги 4 управления в исходное положе- ние. Размещение гибкого полотнища парашюта на поверхности поплавка 1 позволяет предохранить его от повреждений., а продольное расположение - снизить энергозатраты (сопротивление) при транспортировании тормоза. Использование предлагаемого устройства гидродинамического тормоза обеспечивает быстроту и плавность включения, снижение энергозатрат (сопротивления) и предохранение гибкого полотнища парашюта от повреждения при транспортировании в нерабочем положении.

| название | год | авторы | номер документа |
|---|---|---|---|
| Гидродинамический тормоз для остановки плота | 1981 |
|
SU965902A1 |
| Гидродинамический тормоз для остановки плота | 1982 |
|
SU1079572A1 |
| Гидродинамический тормоз для остановки плота | 1983 |
|
SU1133204A1 |
| Гидродинамический тормоз для остановки плота | 1981 |
|
SU994342A1 |
| Гидродинамический тормоз для остановки плота | 1983 |
|
SU1123972A1 |
| Гидродинамический тормоз для остановки плота | 1982 |
|
SU1008127A1 |
| Гидродинамический тормоз для остановки плота | 1974 |
|
SU548520A1 |
| ГИДРОДИНАМИЧЕСКИЙ ТОРМОЗ ДЛЯ ОСТАНОВКИ ПЛОТА | 2011 |
|
RU2457979C1 |
| Гидродинамический тормоз для оста-НОВКи плОТА | 1979 |
|
SU844483A1 |
| Гидродинамический тормоз для остановки плота | 1989 |
|
SU1705214A1 |
ГИДРОДИНАМИЧЕСКИЙ ТОРМОЗ ДЛЯ ОСТАНОВКИ ПЛОТА, содержащий гибкое полотнище парашюта, прикрепленное одним концом к поворотному поплавку, а другим - к горизонтальной балке, и тросовые тяги управления и транспортирования поплавка, отличающ и flvc я тем, что, Cj целью снижения энергозатрат и предохранения парашюта от повреждений путем транспортирования его в нерабочем положении на поверхности поплавка, последний выполнен в виде эллиптического ци- . линдра, на передней части которого установлены узлы крепления полотнища парашюта и тросовых тяг управления поплавком, а на задней - ограничительная балка, при этом на оси вращения поплавка жестко закреплена П-образная рама с направляющими для тросовых тяг управления поплавком, а .площадь полотнища парашюта не превышает половины площалда боковой поверхности цилиндра.S . -«f (Л с г f4 Ф сх ф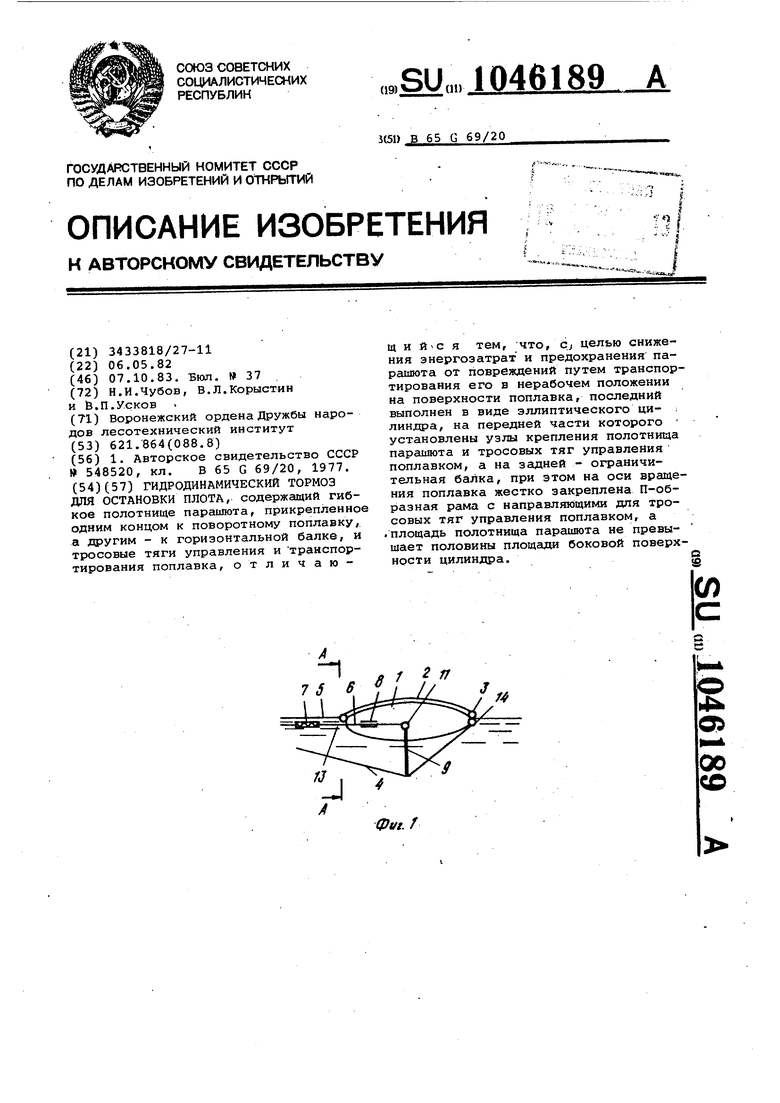
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Гидродинамический тормоз для остановки плота | 1974 |
|
SU548520A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
