(54) ГИДРЮДИНАЛ/МЧЕСКИЙ ТОРМОЗ ДЛЯ ОСТАНОВКИ ПЛОТА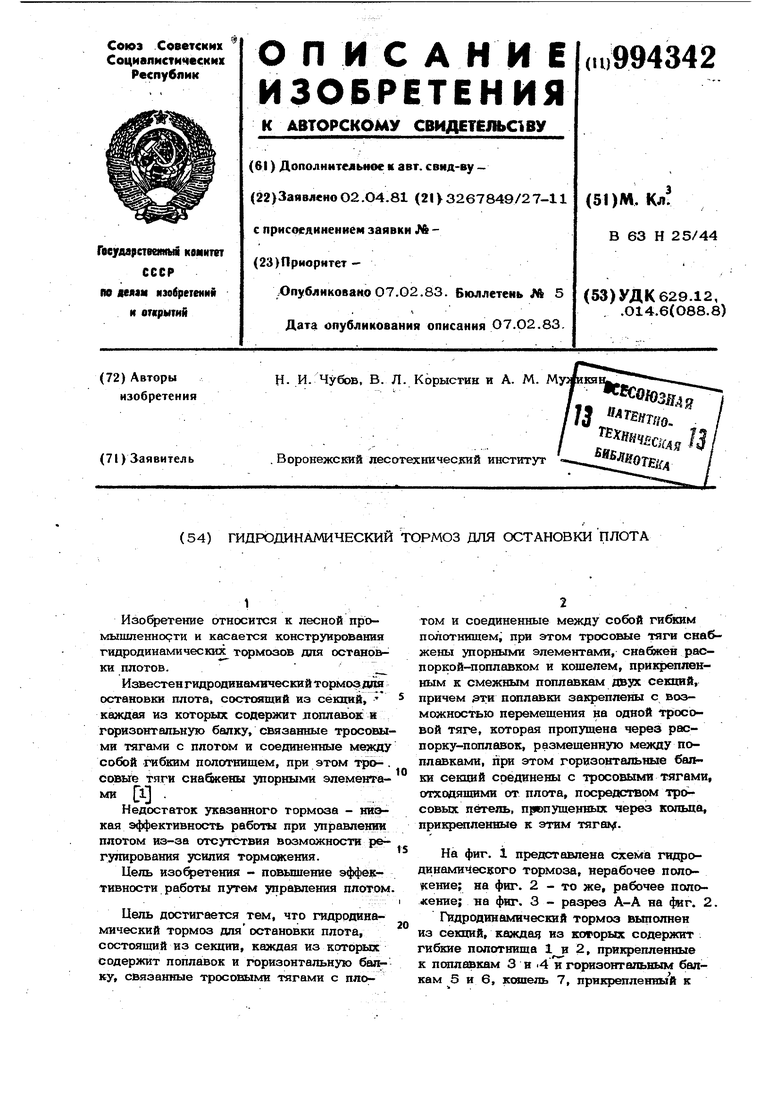
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидродинамический тормоз для остановки плота | 1974 |
|
SU548520A1 |
| Гидродинамический тормоз для остановки плота | 1981 |
|
SU965902A1 |
| Гидродинамический тормоз для остановки плота | 1982 |
|
SU1046189A1 |
| ГИДРОДИНАМИЧЕСКИЙ ТОРМОЗ ДЛЯ ОСТАНОВКИ ПЛОТА | 2011 |
|
RU2457979C1 |
| Гидродинамический тормоз для остановки плота | 1982 |
|
SU1008127A1 |
| Гидродинамический тормоз для оста-НОВКи плОТА | 1979 |
|
SU844483A1 |
| Гидродинамический тормоз для остановки плота | 1983 |
|
SU1123972A1 |
| Гидродинамический тормоз для остановки плота | 1982 |
|
SU1079572A1 |
| Гидродинамический тормоз для остановки плота | 1983 |
|
SU1133204A1 |
| Гидродинамический тормоз для остановки плота | 1989 |
|
SU1705214A1 |
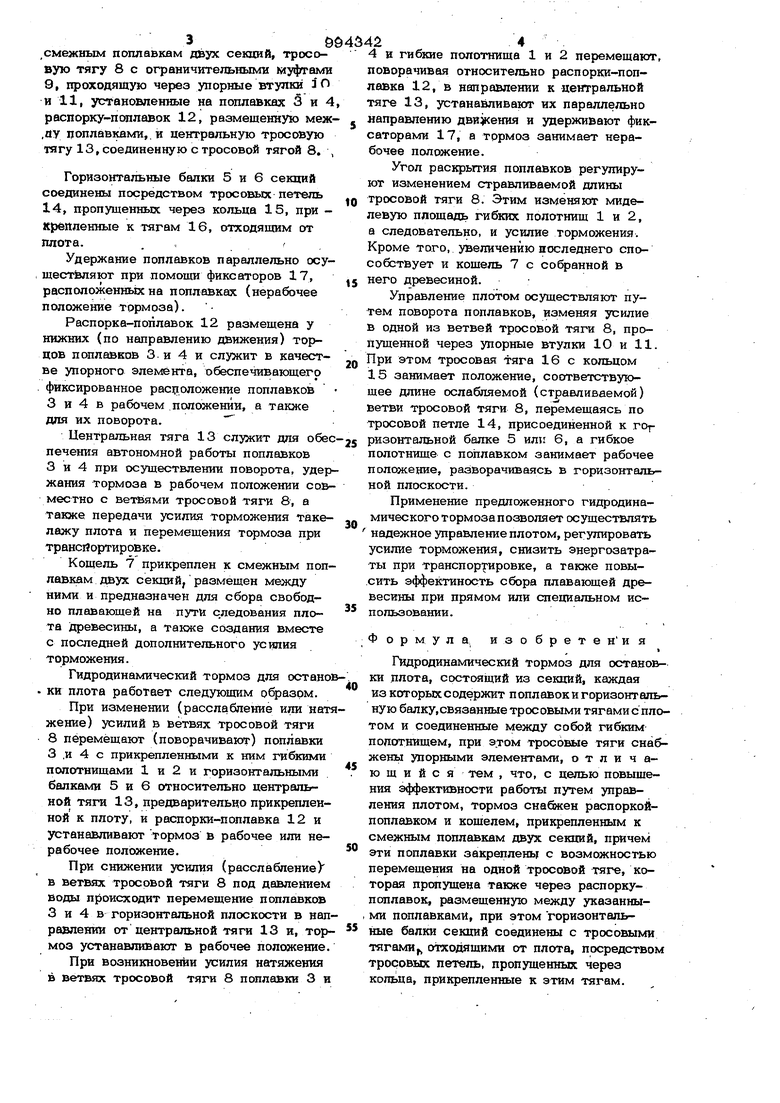
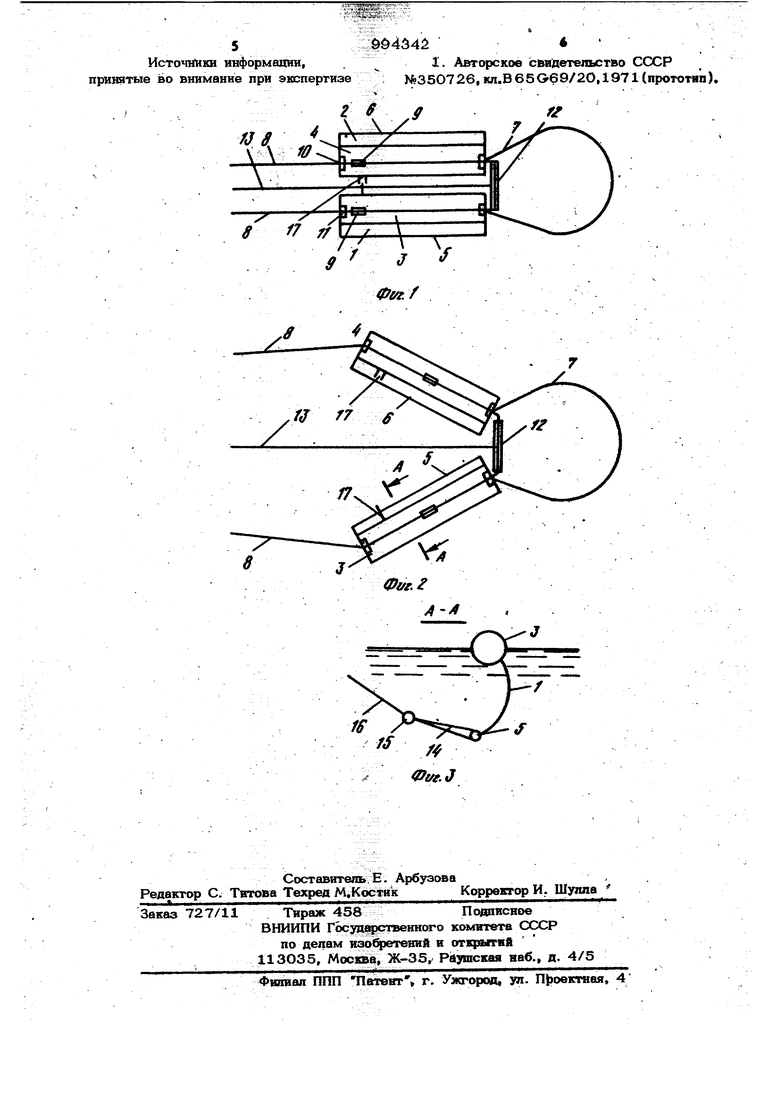
Изофетение относится к лесной промыпшеннорти и касается конструирования гидродинамических тормозов дня остано&ки плотов. Известен гидродинамический тормоз дйя остановки плота, состоящий из секций, каждая из которых содержит лоплавок и горизонтальную балку, связанные тросовы ми тягами с плотом и соединенные между собой гибким полотнищем, при этом тросовые тяги сна€Ькены упорными элементами Y . Недостаток указанного тормоза - ннэкая эффективность работы при управлении плотом из-за отсутствия возможности регулирования усилия торможения. Цель изобретения - повышение эффективности работы путем управления плотом Цель достигается тем, что гидродинамический тормоз для остановки плота, состоящий из секции, каждая из которых содержит поплавок и горизонтальную бадку, связанные тросовыми тягами с плотом и соединенные между собой гибким полотнищем, при этом тросовые тяги снабжены упорными элементами, снабжен распоркой-поплавком и кошелем, прикрепленным к смежным поплавкам двух секций, причем эти поплавки закреплены с возможностью перемешения на одной тросовой тяге, которая пропущена через распорку-поплавок, размещенную между поплавками, при этом горизонтальные балки секций соединены с тросовыми тягами, отходящими от плота, посредством тросовых петель, пропущенных через кольца, прикрепленные к этим тягак. На фиг. 1 представлена схема гидродинамического тормоза, нерабочее поло сение; на фиг. 2 - то же, рабочее положение; на фиг. 3 - разрез А-А на фиг. 2. Гидродинамический тормоз выполнен из секций, каждая из которых содержит гибкие полотнища 1 2, прикрепленные к 3 и 4 iTгоризонтальным балкам 5 и 6, ктапель 7, прикрепленными к D ,смежным поплавкам двух секций, тросовую тягу 8 с ограничитепьными муфтами 9, проходящую через упорные втулки 1П и 11, установленные на поплавках 3 и 4 распорку-поплавок 12, размещенную меж,dy поплавками,, и центральную тросовую тягу 13, соединенную с тросовой тягой 8. , Горизонтальные балки 5 и 6 секций соединены посредством тросовых петель 14, пропущенных через кольца 15, при Крепленные к тягам 16, отходящим от плота..г Удержание поплавков параллельно осу, щестЬляют при помощи фиксаторов 17, расположеннь1х на поплавках (нерабочее положение тормоза). Распорка-поплавок 12 размешена у нижних (по направлению движения) торцов поплавков 3 и 4 и служит в качестве упорного элемента, обеспечивающего фиксированное расположение поплавков 3 и 4 в рабочем положении, а также для их поворота. Центральная тяга 13 служит для обес печения автономной работы поплавков 3 и 4 при осуществлении поворота, удер жания тормоза в рабочем положении совместно с ветвями тросовой тяги 8, а также передачи усилия торможения такелажу плота и перемещения тормоза при транспортировке, Кощель 7 прикреплен к смежным поплавкам двух секций, размещен между ними и предназначен для сбора свободно плавающей на пути следования плота древесины, а также создания вместе с последней дополнительного усилия торможения. Гидродинамический тормоз для остано ки плота работает следующим образом. При изменении (расслабление или нат жение) усилий в тросовой тяги 8 перемещают (поворачивают) поплавки 3 .и 4 с прикрепленными к ним гибкими полотнищами 1 и 2 и горизонтальными балками 5 и 6 относительно центральной тяги 13, предварительно прикрепленной к плоту, и распорки-поплавка 12 и устанавливают тормоз в рабочее или нерабочее положение. При снижении усилия (расслабление в ветвях тросовой тяги 8 под давлением воды происходит перемещение поплавков 3 и 4 в горизонтальной плоскости в нап равлении от центральной тяги 13 и, тор моз устанавливают в рабочее положение При возникновении усилия натяжения в ветвях тросовой тяги 8 поплавки 3 и 2 4 и гибкие полотнища 1 и 2 перемещают, поворачивая относительно распорки-поплавка 12, в направлении к центральной тяге 13, устанавливают их параллельно направлению дви кения и удерживают фиксаторами 17, а тормоз занимает нерабочее положение. Угол раскрытия поплавков регулируют изменением стравливаемой длины тросовой тяги 8. Этим изменяют миделевую площадь гибких полотнищ 1 и 2, а следовательно, и усилие торможения. Кроме того, увеличению последнего способствует и кощель 7 с собранной в него древесиной. Управление плотом осуществляют путем поворота поплавков, изменяя усилие в одной из ветвей тросовой тяги 8, пропущенной через упорные втулки 10 и 11. При этом тросовая тяга 16 с кольцом Is занимает положение, соответствующее длине ослабляемой (стравливаемой) ветви тросовой тяги 8, перемещаясь по тросовой петле 14, присоединенной к гор ризонтальной балке 5 или 6, а гибкое полотнище с поплавком занимает рабочее положение, разворачиваясь в горизонтальной плоскости.. Применение предложенного гидродинамического тормозапозволяет осуществлять надежное управление плотом, регулировать усилие торможения, снизить энергозатраты при транспортировке, а также повысить эффектиность сбора плавающей древесины при прямом или специальном использовании. Фор мул а; изобретения Гидродинамический тормоз для остановки плота, состоящий из секций, каждая из которых с одержит поплавок и горизонтальную балку,связанные тросовыми тягами с плотом и соединенные между собой гибким полотнищем, при этом тросовые тяги снабжены упорными элементами, отличающийся тем , что, с целью повышения эффективности работы путем управления плотом, тормоз снабжен распоркойпоплавком и кощелем, прикрепленным к смежным поплавкам двух секций, причем эти поплавки закрепленьг с возможностью перемещения на одной тросовой тяге, которая прштущена также через распоркупоплавок, размещенную между указанны, ми поплавками, при этом горизонтальные балки секций соединены с тросовыми тягами отходящими от плота, посредством тросовых петель, пропущенных через кольца, прикрепленные к этим тягам.
. - ---
5&&4345 4 .
Источййки информации,.I. Авторское сввйетельство СССР
принятые во внимаиие при экспертизе N«350726, кп.В 65G69/20,1971 (прототип),
е
Ф&г. г
