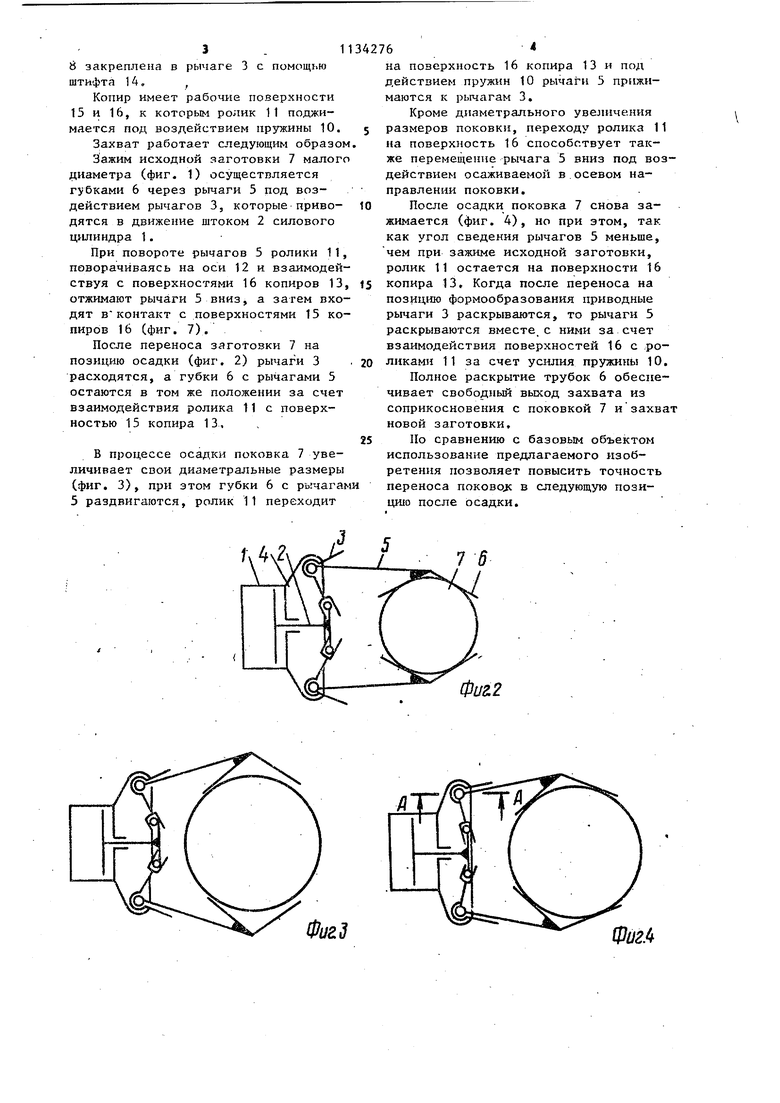
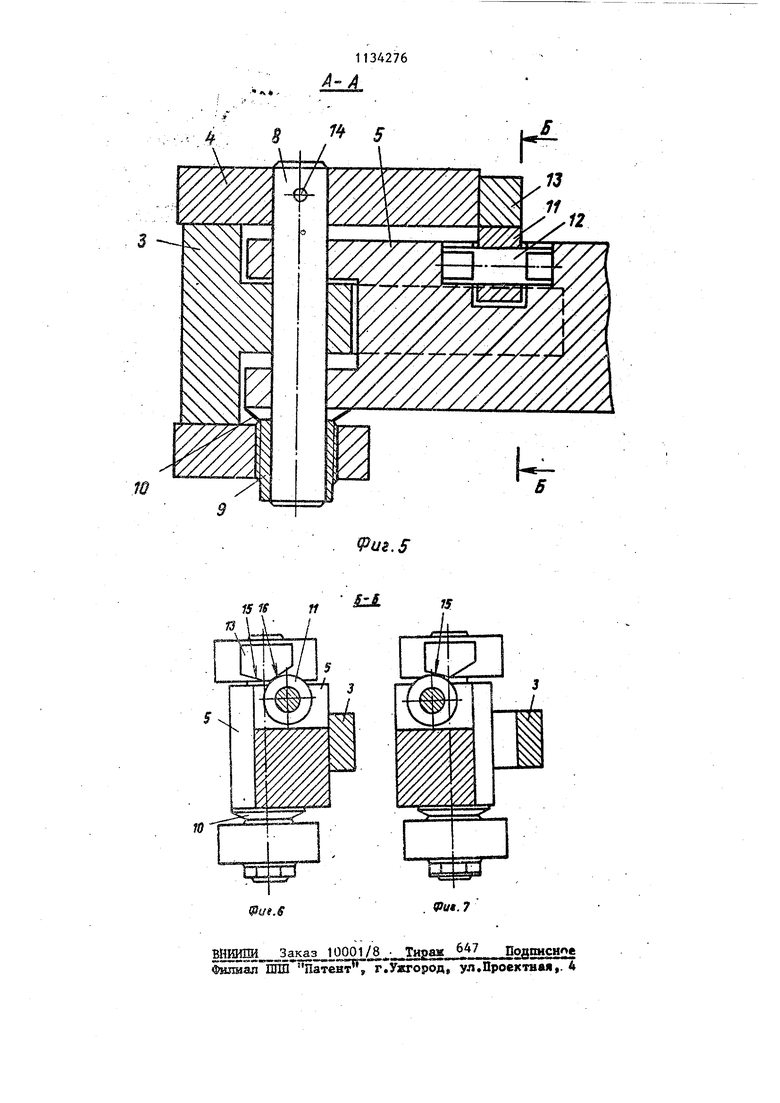
Изобретение относится к вспомогательному оборудованию кузнечноЛ1тамповочного производства и может быть использовано для удержания поковок в процессе осадки и последующ го их переноса. Известен захват манипулятора, со держапщй корпус, сиповой цилиндр, приводные и дополнительные рычаги губками, шарнирно устанрвленные на приводных рычагах. Дополнительные рычаги имею;г самостоятельные приводы, вьшолненные в виде подпружиненных поршней со штоками, что позволяет уменьшать усилие зажима детали при исполнении определенных технологических операций ,1 }. Недостатками захвата являются большие габариты и сложность конструкции из-за наличия отдельных приводов для дополнительных рычаго.в и небольшая надежность схвата наличия поршней с уплотнениями и пружин. Наиболее близким к предлагаемом по технической сущности и достигаемому результату является захват манипулятора для выполнения процесса осадки поковок, содержащий корпус со смонтированными в нем приводными рычагами, шарнирно связанными с до полнительными рычагами, несущими зажимные губки, посредством осей, жестко закрепленных в корпусе, а также толкатели, дополнительных рычагов, жестко закрепленные на прив ных рычагах, и средства поджатия д полнительных рьгчагов вдоль оси к соответствующим опорным элементам корпуса, каждое из, которых выполне но в виде установленной на оси меж ду корпусом и дополнительным рычагом тарельчатой пружины и регулиро ночной гайки, охватывающей ось и смонтированной в корпусе с возможностью взаимодействия с тарельчато пружиной 2. Однако захват недостаточно надежен в работе, так как после пере коса поковки с позиции осадки на позицию формообразования и раскрытия приводных рычагов дополнительные рычаги не раскрываются (как и на позиции осадки), что может привести к смещению детали в момент освобождения захватов от детали за счет сдвига захвата в направлении оси поковки Целью изобретения является повышение размерной точности поковок за счет повьш1ения точности позиционирования их на следующей после осадки позиции. Указанная цель достигается тем, что в захвате манипулятора для выполнения процесса осадки, содержащем корпус со смонтированными в нем приводными рычагами, шарнирно связанными с дополнительными рычагами, несущими зажимные губки, посредством осей, жестко закрепленных в корпусе, а также толкатели дополнительных рычагов, жестко закрепленные на приводных рычагах, и средства поджатия дополнительных рычагов вдоль оси к соответствуюiiVHM опорным элементам корпуса, каждое из которых выполнено в виде установленной 1а оси между корпусом и дополнит льным рычагом тарельчатой пружины и регулировочной гайки, охватывающей о.сь и смонтированный в корпусе, с возможностью взаимодействия с тарельчатой пружиной, каждый дополнительный рычаг снабжен роликом, а каж,цый из опорных элементов выполнен в виде копира V-образного профиля, жестко закрепленного на корпусе с возможностью взаимодействия с соответствующим роликом. На фиг. 1 изображена кинематическая схема захвата в положении зажима неосаженной заготовки; на фиг,2 то же, в положении удержания заготовки перед осадкой; на фиг. 3 - то же, после осадки заготовки на фиг.Ато же, в положении зажима осаженной заготовки| на фиг. 5 разрез А-А на фиг, 4; на фнг. 6 - разрез Б-Б на фиг. 5 (при разжатом захвате); на фиг. 7 - то же, в гмомент удержания заготовки перед осадкой. Захват состоит из силового цилиндра t, штока 2, соединенного ,с приводными рычагами 3, и корпуса 4j в котором установлены дополнительные рычаги 5 с зажимньн И губками 6 для удержания заготовки 7. Рычаги 5 соединены с корпусом 4 и рычагами 3 посредством оси 8. Между корпусом 4 и рычагом 5 установлена регулировочная гайка 9 и тарельчатая пружина 10о другой стороны к рычагу 5 прикреплены ролики t1 с осью 12, а в корпусе 4 устаковле 1Ь копиры 13. Ось 8 закреплена в рычаге 3 с помощью штифта 14, , Копир имеет рабочие поверхности 15 и 16, к которым ролик 11 поджимается под воздействием пружины 10. Захват работает следующим образом Зажим исходной заготовки 7 малого диаметра (фиг. 1) осуществляется губками 6 через рычаги 5 под воздействием рычагов 3, которые приводятся в движение штоком 2 силового щшиндра 1. При повороте рычагов 5 ролики 11 поворачиваясь на оси 12 к взаимодей ствуя с поверхностями 16 копиров 13 отжимают рычаги 5 вниз, а затем вхо дят вконтакт с поверхностями 15 ко пиров 16 (фиг. 7). После переноса заготовки 7 на позицию осадки (фиг. 2) рычаги 3 расходятся, а губки 6 с рычагами 5 остаются в том же положении за счет взаимодействия ролика 11 с поверхностью 15 копира 13, В процессе осадки поковка 7 увеличивает свои диаметральные размеры (фиг. 3), при этом губки 6 с рычага 5 раздвигаются, ролик 11 переходит на поверхность 16 копира 13 и под действием пружин 10 рычаги 5 прижимаются к рычагам 3. Кроме диаметрального увеличения размеров поковки, переходу ролика 11 на поверхность 16 способствует также перемещение рычага 5 вниз под воздействием осаживаемой в.осевом направлении поковки. После осадки поковка 7 снова зажимается (фиг. 4), но при этом, так как угол сведения рычагов 5 меньше, чем при зажиме исходной заготовки, ролик 11 остается на поверхности 16 копира 13. Когда после переноса на позицию формообразования приводные рычаги 3 раскрываются, то рычаги 5 раскрываются вместе, с ними за счет взаимодействия поверхностей 16с роликами 11 за счет усилия пружины 10. Полное раскрытие трубок 6 обеспечивает свободный выход захвата из соприкосновения с поковкой 7 изахват новой заготовки. По сравнению с базовым объектом использование предлагаемого изобретения позволяет повысить точность переноса noKOBoj в следующую позицию после осадки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват манипулятора | 1982 |
|
SU1050804A1 |
| Манипулятор к ковочным вальцам | 1973 |
|
SU651885A1 |
| Автоматическая линия штамповки поворотных кулаков | 1987 |
|
SU1466868A1 |
| Многопозиционный пресс для горячей объемной штамповки | 1985 |
|
SU1279716A1 |
| Захват кузнечного манипулятора | 1980 |
|
SU912391A1 |
| Автоматическая линия для изготовления деталей типа топоров | 1989 |
|
SU1727945A1 |
| Устройство для формообразованияпРОфильНыХ КОлЕц | 1979 |
|
SU841740A1 |
| Устройство для переноса заготовок между позициями обрабатывающей машины | 1985 |
|
SU1301529A2 |
| Захват манипулятора | 1980 |
|
SU889421A1 |
| Кузнечный манипулятор | 1986 |
|
SU1398971A1 |
ЗАХВАТ МАНИПУЛЯТОРА для выполнения процесса осадки, содержащий корпус со смонтированными в нем ; приводными рычагами, шарнирно свя- занными с дополнительными рычагами, несущими зажимные губки, посредством осей, жестко закрепленньЬс в корпусе, а также толкатели дополнительных рычагов,жестко закрепленные на приводных рычагах, и средства поджатия дополнительных рычагов вдоль оси к соответствующим опорным элементам корпуса, каждое из которых выполнено в виде установленной на оси между корпусом и дополнительным рычагом тарельчатой пружины и регулировочной гайки, охватьшающей ось и смонтированной в корпусе с возможностью взаимодействия с тарельчатой пружиной, отличающий.с я тем, что, с целью повьпиения точности поковок за счет повышения точности позиционирования их на следующей после осадки позиции, каждый (Л дополнительный рычаг снабжен роли,ком, а каждый из опорных элементов вьтолнен в виде копира V-образного профиля, жестко закрепленного на корпусе с возможйостью взаимодействия с соответствующим роликом. 00 4 Ю Oi 
ФигА
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
