Инобрртенир относится к вспомогатель кому оборудованию кузмечно-штамповочного iipoiKuui/icTBa и может быть испол.ьзова но д,1я удержания поковок в процессе осад км и последующего их переноса.
Известен лахват манипулятора, содержа ший силовой цилиндр, соединенный через рычажный механизм с зажимнымигубками, регулировочный цилиндр с подпружиненным поршнем н трехпозиционный гидрораспределитель. Силовой н регулировочный цилиндры соединены между собой трубопроводом |1).
В этом устройстве мягкое удержание дегали, т. е удержание, обеспечивающеекомгимкяцию изменения диаметра детали, обеспечн дается введением дополнительного ресулоровочного цилиндра и усложнением сис1емы управления золотником. Кроме того, данная конструкция не позволяет использовать в качестве рабочего тела, воздух.
Наиболее близким к предлагаемому по технической сущности и достигаемому результату является захват манипулятора, содержащий корпус со смоитироваиными в нем приводными рычагами, связанными с силовым цилиндром, а также дополнительные рычаги с губками по числу приводных рычагов.
Дополнительные рычаги в захвате имеют самостоятельные приводы, выполненные в виде подпружиненных поршней со штоками, что позволяет ослаблять зажим при выполнении определенных технологических операций (2).
В случае использования данного захвата при удержании поковки при ее осадке, у которой при деформировании увеличивается диаметр, захват ненадежен в работе из-за повышенного износа поршней с уплотнениями и пружин в приводах дополнительных рычагов.
Цель изобретения - повышение надежности захвата при удержании поковки в процессе ее осадки.
Указанная цель достигается тем, что в захвате манипулятора, преимущественна осуществления процесса осадки, содержащем корпус со смонтированными -в нем приводны.ми рычагами, связанными с силовым цилиндром, а также дополнительные рычаги с губками по числу приводных ры чагов, приводные и дополнительные рычаги каждой пары шарнирно связаны между собой осью, а каждая указанная ось жестко закреплена в корпусе и снабжена/фрикционными элементами, установленными между корпусом и дополнительным рычагом.
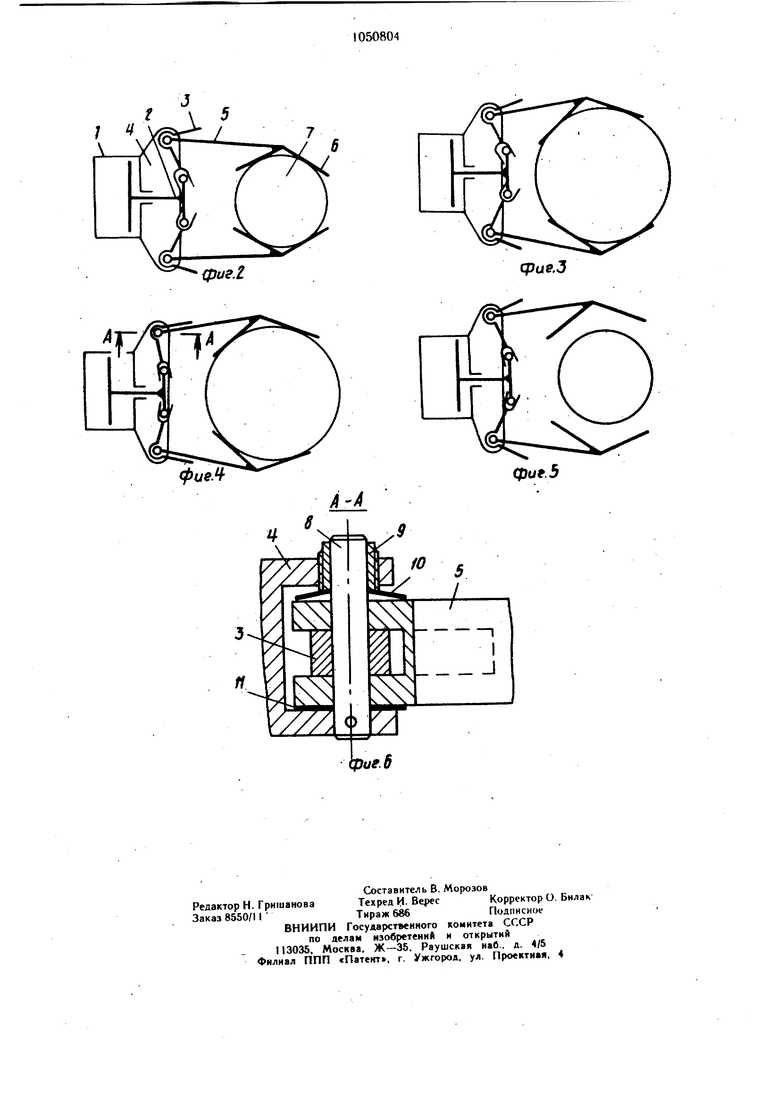
На фиг. 1 изображена кинематическа.я схема .чахвата в положении зажима неосаженной заготовки; на фиг. 2 - то же, в положении удержания заготовки перед осадкой; на фиг. 3 TO же, после осадки за, готовки; на фиг. 4 - - то же, в положении зажима осаженной заготовки; на фиг. 5 то Re, в положении перед за.хватом неосаженной заготовки; на фиг. 6 - сечение А-А на фиг. 4.
10Захват состоит из силового цилиндра 1,
штока 2, соединенного с приводными рычагами 3, н корпуса 4, в котором установлены дополнительные рычаги 5 с губками 6, удерживающие заготовку 7. Рычаги 5 соединены с корпусом 4 и рычагами 3 посредством оси 8. Между корпусом 4 и рычагаМ51 5 с одной стороны установлен винт 9 , и тарельчатая пружину 10, а с другой - фрикционный элемент 11.
Захват работает .следующим образом. 0 Зажим исходной заготовки 7 малого диаметра (фиг. 1) осуществляется губками 6 через рычаги 5 под воздействием рычагов 3, которые приводятся в движение штоком 2 силового цилиндра 1. После переноса заготовки 7 на позицию осадки (фиг. 2) рыча5 ги 3 расходятся, а губки 6 с рычагами S
остаются в том же положении. Это обеспе- чивается тем, что под воздействием пружи-4 ны 10 (фиг. 6) рычаги 5 прижимаются череэ, фрикционный элемент II к корпусу 4, а рычаги 3 свободно проворачиваются относительно рычагов 5. Сила трения, удерживающая рычаг 5 в исходном положении, регу: лируется винтом 9 с учетом удержания заготовки 7 в вертикальном положении. В процессе осадки поковка 7 увеличивает
г свои диаметральные размеры (фиг. 3), при этом губки 6 раздвигаются, преодолевая силы трения между рычагами 5 .и корпусом 4. После осадки поковка 7 снова зажимается и переносится на следующую позицию, затем рычаги 3 разжимаются (фиг. 3}
О охват сдвигается роботом в направлении оси поковки 7, а сама поковка остается на месте, т. к. рычаги 3 не передают усилие зажима на рычаги 5 с губками 6. При этом рычаг1{ 5 остаются в положении, соответс ствующем зажиму поковки большего диаметра, такое положение обеспечивает свободный захват заготовки меньшего диаметра при возврате схвата в исходную позицию (фиг. 5).
По сравнению с базовым объектом (про0 тотип) использование данного изобретения позволяет повысить надежность захвата манипулятора при удержании поковки BCJ время ее осадки.
фиеЗ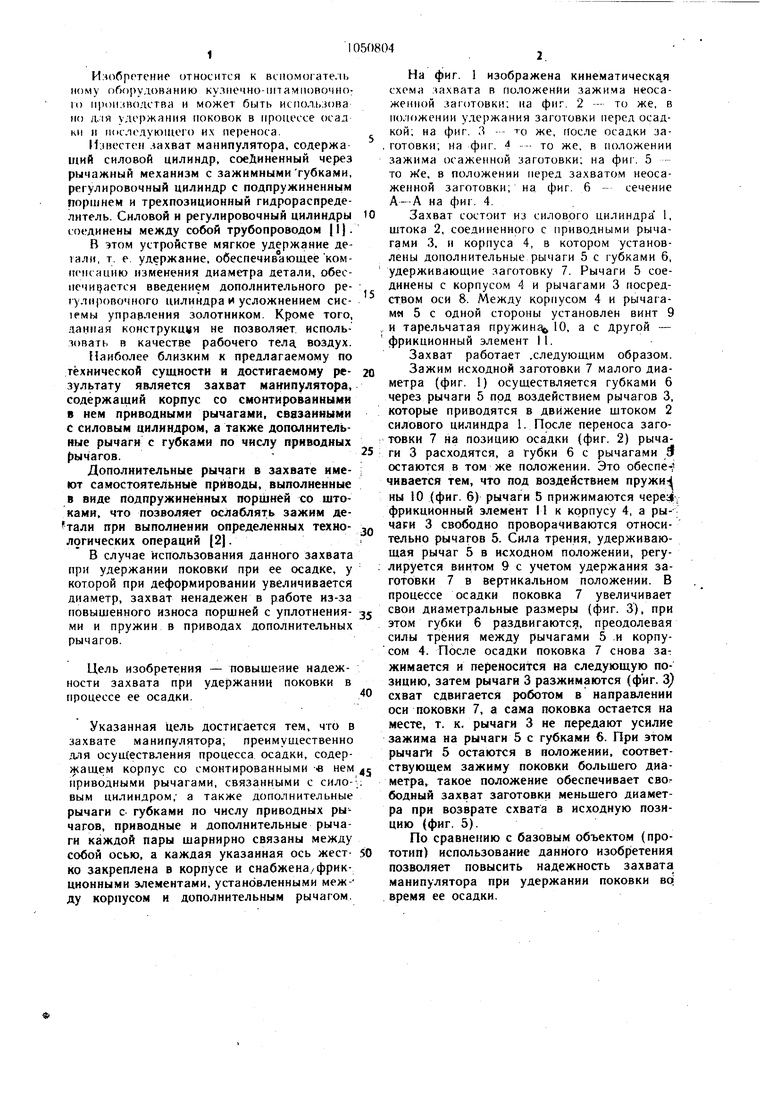
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват манипулятора | 1983 |
|
SU1134276A1 |
| Захват кузнечного манипулятора | 1980 |
|
SU912391A1 |
| Захватная головка манипулятора | 1980 |
|
SU897379A1 |
| УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ СИЛЬФОНОВ | 1990 |
|
RU2019339C1 |
| Схват промышленного робота Саблина В.П. | 1982 |
|
SU1060470A1 |
| Автоматическая линия штамповки поворотных кулаков | 1987 |
|
SU1466868A1 |
| Многопозиционный пресс для горячей объемной штамповки | 1985 |
|
SU1279716A1 |
| Автоматизированный пресс для объемной горячей штамповки заготовок | 1989 |
|
SU1804943A1 |
| Кузнечный манипулятор | 1986 |
|
SU1398971A1 |
| Автомат для стыковой сварки давлением | 1988 |
|
SU1668074A1 |
ЗАХВАТ МАНИПУЛЯТОРА, пре-1 имущественно для осуществления процесса осадки, содержащий корпус со смонтирован ными в нем приводными рычагами, связанными с силовым цилиндром, а также дополнительные рычаги с губками по числу приводных рычагов, отличающийся тем, что, с целью повышения надежности, приводные и дополнительные рычаги каждой пары шармирно связаны между собой осью, а каждая указанная ось жестко закреплена в корпусе и снабжена фрикционными элемён-: i тами. установленными между корпусом к i дополнительным рычагом СЛ О 00 о 4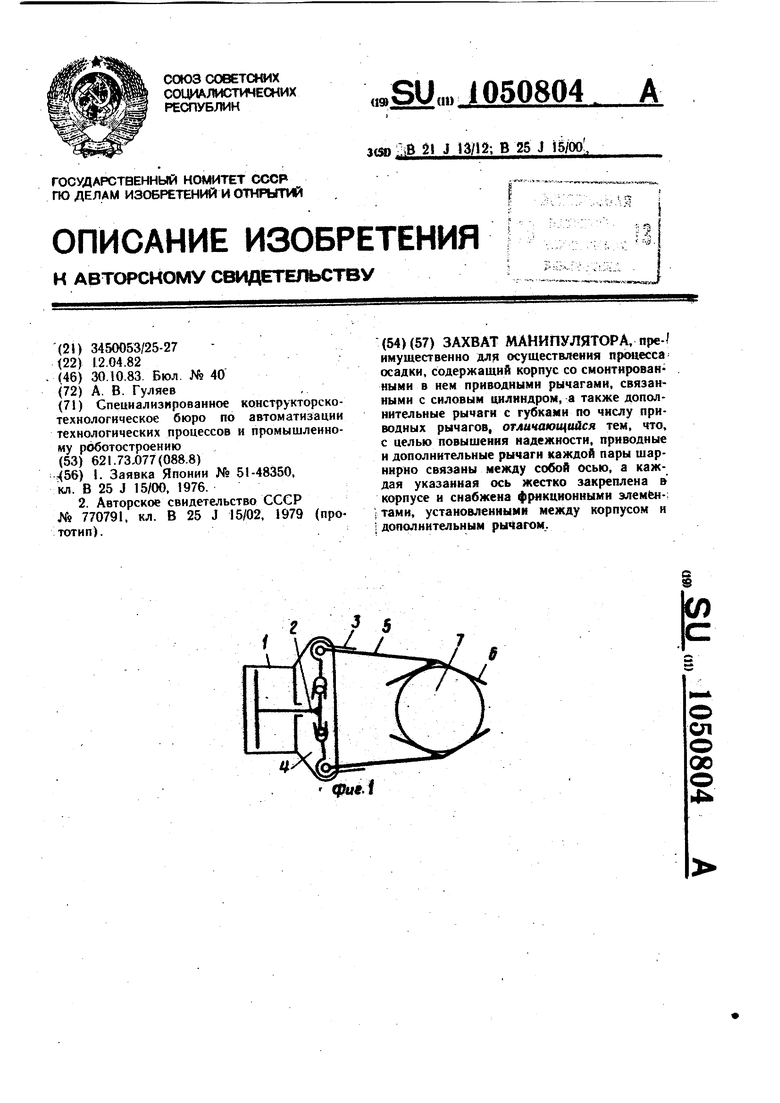
| Способ запрессовки не выдержавших гидравлической пробы отливок | 1923 |
|
SU51A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Захват манипулятора | 1979 |
|
SU770791A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
