(5) ЗАХВАТ МАНИПУЛЯТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват промышленного робота | 1987 |
|
SU1509247A1 |
| Захват манипулятора | 1983 |
|
SU1134276A1 |
| Установка для центробежной биметаллизации втулок | 1984 |
|
SU1260110A1 |
| Захват манипулятора | 1990 |
|
SU1834796A3 |
| Устройство для автоматической смены инструмента | 1983 |
|
SU1135593A1 |
| Схват манипулятора | 1983 |
|
SU1057273A1 |
| ЗАХВАТ ДЛЯ ИЗДЕЛИЙ С ОТВЕРСТИЕМ | 1992 |
|
RU2045377C1 |
| Манипулятор для микросварки | 1984 |
|
SU1155405A1 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ ЗАГОТОВОК В ПРЕСС | 1993 |
|
RU2063287C1 |
| Захват манипулятора | 1980 |
|
SU876421A1 |
I
Изобретение относится к вспомогательному оборудованию кузнечноштамповочного производства, а именно к конструкциям манипуляторов.
Известен захват манипулятора, со держащий полый корпус, шарнирно смон тированные на корпусе средней своей частью рычаги, одни концы которых подпружинены между собой, а другие снабжены зажимными губками, а также механизм поворота рычагов, выполненный в виде размещённого в корпусе приводного подвижного штока с конической частью 1Х
Недостатком известного захвата манипулятора является невысокая надежность его работы при захвате поковок с облоем.
Цель изобретения - повьнление надежности работы.
Цель достигается тем, что в захвате манипулятора, содержащем полый корпус, шарнирно смонтированные на корпусе средней своей частью рычаги
одни концы которых подпружинены между собой, а другие зажимными губками, а также механизм поворота рычагов, выполненный в- виде размещенного в корпусе приводного подвижного штока с конической частью, механизм поворота рычагов снабжен толкателями рычагов, установленными в корпусе с возможностью взаимодействия с конической частью приводного
10 подвижного штока, d нижней части корпуса выполнены профильные пазы, соответствующие Профилю поковки, а зажимные губки выполнены в виде подпружиненных относительно рычагов пальtsцев с наклонными рабочими поверхностями.
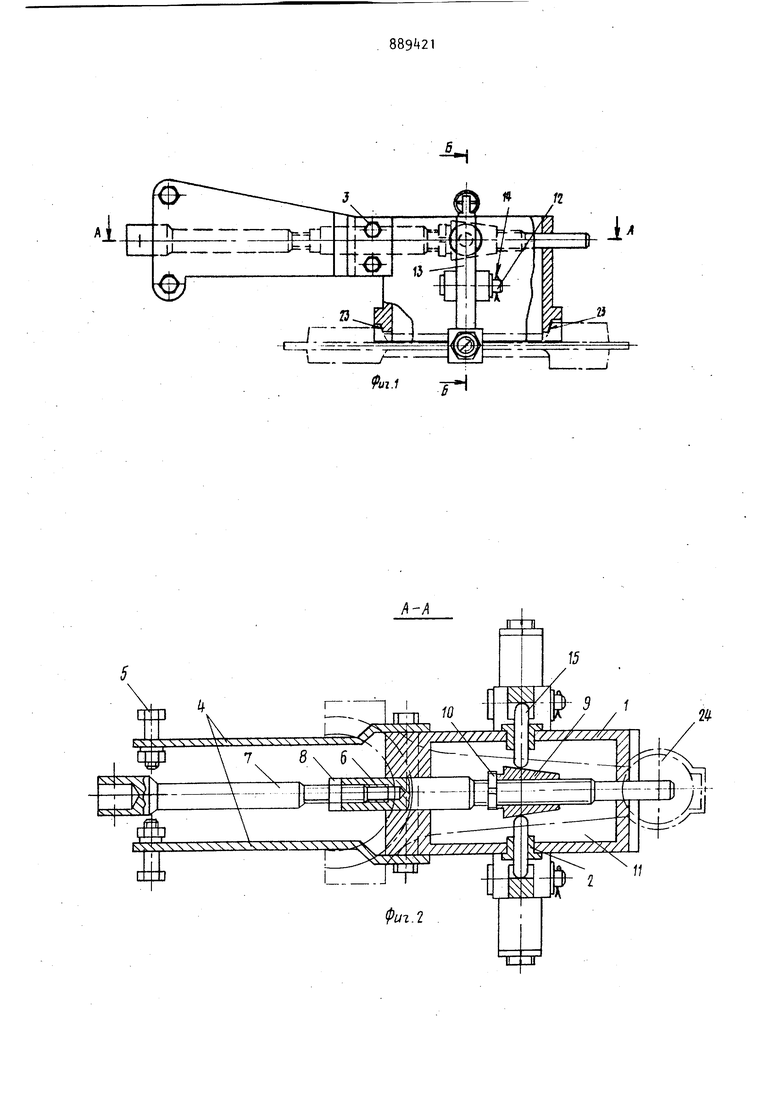
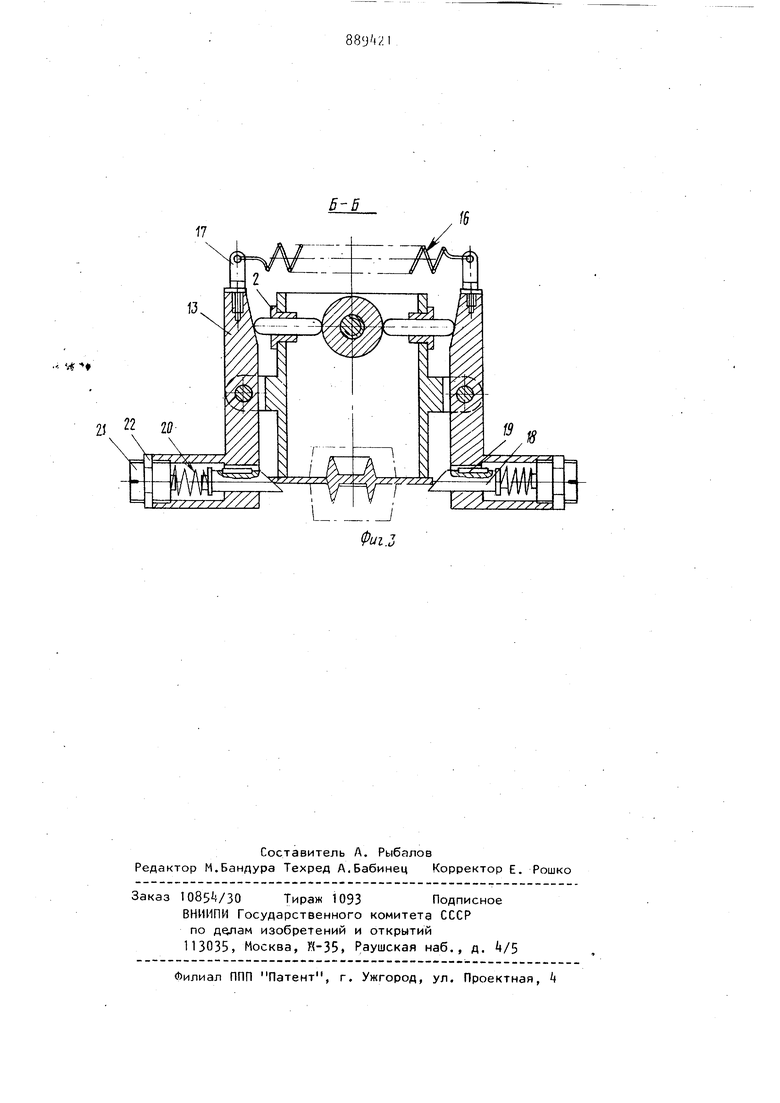
На фиг. 1 изображен захват манипулятора, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - раз20рез Б-Б на фиг. 1.
Захват манипулятора содержит корпус 1, в котором запрессованы направ ляющие втулки 2. К корпусу 1 с помощью винтов 3 крепятся щечки , которые устанавливаются на руке ма нипулятора ( не показан) с помощью болтов 5. В корпусе 1 размещен шток 6, который соединен через хвостовик 7 гайкой 8 с приводом (не показан)с возможностью регулировки его хода. На штоке 6 закреплен на резьбе конус 9 с гайкой 10 с возмох ностью регулировки вдоль штока. Конус 9 размещен в выполненном в корпусе 1 окне 11. К корпусу 1 с помощью осей 12 шарнирно прикреплены два рычага 13 И зафиксированы с помощью шплинтов 14. Оба рычага 13 связаны с конусом 9 двумя толкателями 15, размещенными в корпусе 1. Кроме того, рычаги 13 свя заны между собой пружиной 16 через серьги 17. В нижней части в направля щих пазах на концах рычагов 13 пер, пендикулярно оси захвата размещены зажимные пальцы .18,зафиксированы от проводов шпонкой 19 и подпружинены пружиной 20, Регулировку усилия зажима пружины 20 осуществляют винтом 21 и гайкой 22. В нижней части корпуса 1 выполнены продольные центрирующие пазы 23, соответствующие профилю отштампованной и зажимаемой детали, .например шатуна 24. Захват манипулятора работает следующим образом f на примере операции обрезки облоя шатуна; . При опускании руки манипулятора (не показана} вместе с захватом корпус 1 садится на профиль шатуна 24 и центрируется относительно корпуса профильными центрирующими пазами 23. Таким образом, достигается точное совмещение продольной оси захвата и шатуна. При включении привода хвостовик 7, шток 6 и конус 9 перемеидаются в правое полох(ение вдоль оси захвата. При этом конус 9 взаимодействует с толкателями 15(В результате чего пр исходит движение толкателей 15 в на правлении, перпендикулярном оси захвата, что приводит к сведению (пово роту)рычагов 13 вокруг осей 12 до размера, определяемого ходом конуса В это время пружины 20 сжимаются и зажимные пальцы 18 зажимают шатун 2 за облой с усилием, определяющим силой пружины. Таким образом, осуществляется захват шатуна за облой который распределяется неравномерно в направлении, перпендикулярном относительно его продольной оси, за счет независимого линейного хода за 1 . 4 жимных пальцев. На внутренних сторонах зажимных пальцев 18 имеются наклонные рабочие поверхности.Благодаря наличию наклонных поверхностей, а также движению зажимных пальцев навстречу друг другу происходит захватывание шатуна и обеспечивается надежное прилегание шатуна к корпусу схвата. При обратном включении привода происходит разжатие захвата под действием пружины 16 через серьги 17, связанной с рычагами 13 и шатун 24 устанавливается в зону обработки (матрицу обрезного штампа,не показана).С целью сокращения холос- того хода для захвата шатуна предусмотрена регулировка расстояния между зажимными пальцами 18, которая осуществляется с помощью резьбового соединения конуса 9 со штоком 6 и фиксируется гайкой 10. За счет наличия резьбового соединения хвостовика 7 со штоком 6 осуществляется ре- гулировка хода поршня. Усилие зажима шатуна зажимными пальцами 18 регулируется поджатием пружины 20 с помощью винтов 21 и фиксируется гайкой 2 2. Предлагаемый захват манипулятора обладает высокой надежностью работы при захвате поковок с облоем. Формула изобретения Захват манипулятора, содержащий полый корпус, шарнирно смонтированные на корпусе средней своей частью рычаги, одни концы которых подпружинены между собой, а другие снабжены зажимными губками, а также механизм поворота рычагов, выполненный в виде размещенного в корпусе приводного подвижного штока с конической частью, отличающийс я тем, что, с целью повышения наде): ности работы при захвате поковок с облоем, механизм поворота рычагов снабжен толкателями рычагов, установленными в корпусе с возможностью взаимодействия с конической частью приводного подвижного штока, в нижней части корпуса выполнены профильные пазы, соответствующие профилю поковки, а зажимные губки выполнены в виде подпружиненных относительно рычагов пальцев с наклонными рабочими поверхностями. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 582175, кл. В 25 J 15/00, 30.11.70. П П и 22 iQ
