Известные датчики угловой скорости, основанные на сочетании гироскопа с двумя степенями свободы с электронным нреобразователем имеют ряд недостатков. К ним относятся возникновение значительных динамических ошибок из-за сравнительно больших угловых неремешений подвижной системы датчика и невозможность уменьшения габаритов датчика ниже определенной величины, при которой кинетический момент гироскопа значительно больше моментов вредных сил (трения, небаланса и нр.), обуславливаюших погрешности прибора.
Для уменьшения моментов трения и габаритов датчика, а также повышения точности его работы предлагается помещать гироскоп совместно с электронным преобразователем в вакуумированный баллон.
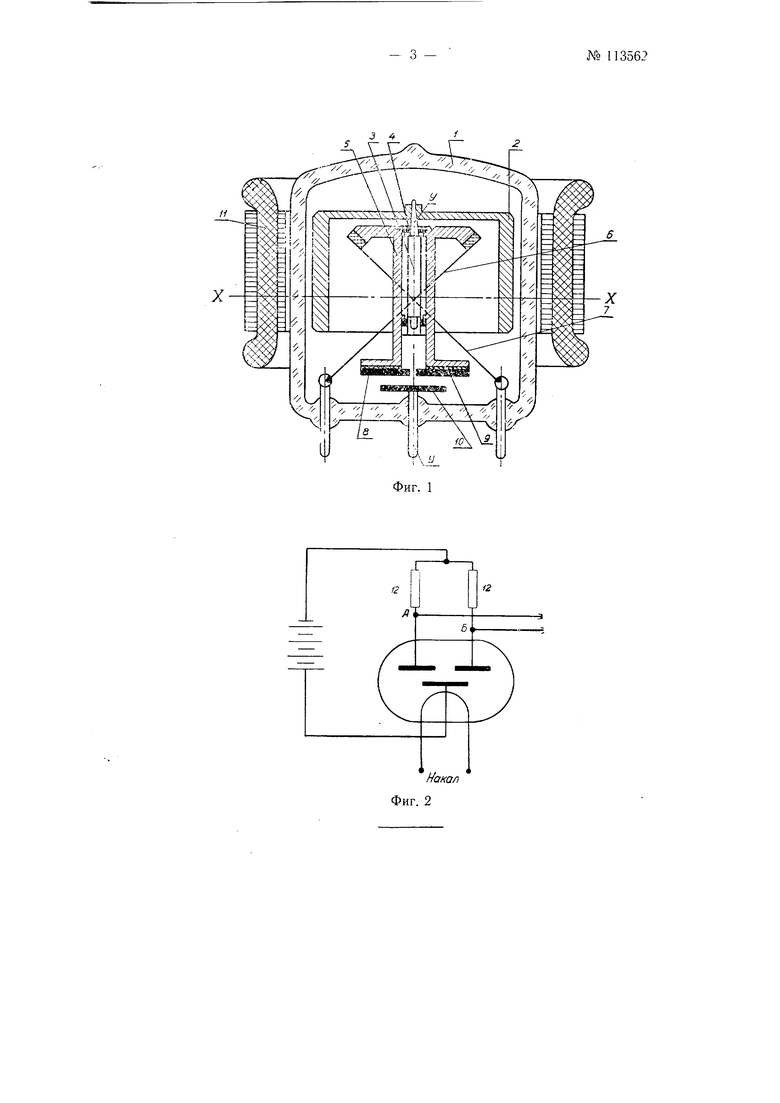
На фиг. 1 изображена конструктивная схема предлагаемого датчика; на фиг. 2 - его электрическая схема.
Внутри вакуумированного герметического баллона У из стекла или пластмассы смонтирован гироскоп. Подвижная система его выполнена в виде металлического ротора 2, враш,ающегося на оси 3 в подшипниках 4. Последние укренлены в рамке 5, нодвешенной внутри баллона / на двух или нескольких крестообразно расположенных и изолированны.ч одна от другой плоских пружинах 6 и 7. Рамка 5 несет на себе два изолированных подвижных электрода 8 и 9, к которым через пружины 6 и 7 подводится электрический ток. Неподвижный электрод JO укреплен на корпусе баллона /. Снаружи баллон / охватывается неподвижным кольцевым статором //, который питается переменным током и создает враш,аюшееся магнитное поле, наводяшее в роторе 2 вихревые токи.
В результате взаимодействия вихревых токов ротора с магнитным полем статора создается врашаюший момент, разгоняюший ротор вокруг оси УУ до угловой скорости, близкой к скорости врашения магнитного поля статора. Если движущийся объект вместе с установленным на нем датчиком врашается относительно оси XX с некоторой угловой
№ 113562- 2 -
скоростью, то возникает гироскопический момент, поворачивающий подвижную систему в плоскости чертежа до тех пор пока этот момент не окажется уравновешенным моментом упругих сил, развиваемых пружинами 6 и 7. Е процессе поворота подвижной системы датчика электроды 8 и 9 смещаются относительно неподвижного электрода W, в результате чего происходит перераспределение электронного потока между электродами.
Для получения сигнала знакопеременной полярности (в соответствии со знаком измеряемой угловой скорости) съем сигнала производится но дифференциальной схеме. Один из возможных вариантов съема сигнала датчика, в котором ненодвижный электрод 10 служит катодом, а два подвижных электрода 8 и 9, связанные с гиросконом, являются анодами, показан на фиг. 2.
Подогрев катода может осуществляться с помощью дополнительной нити накала (на чертеже не показана).
Анодное напряжение подводится к электродам 8 и 9 через два одинаковых добавочных сопротивления 12. В качестве выходного сигнала используется разность потенциалов, измеряемая между точками Л и 5, равная разности падений напряжения на добавочных сонротивлениях 12.
При движении объекта, на котором установлен датчик с некоторой угловой скоростью аноды, 8 и 9 смещаются относительно катода в ту или другую сторону. При этом ток, проходящий через один анод, уменьшается, а через другой-увеличивается и на выходе возникает разность потенциалов, знак которой зависит от знака измеряемой угловой скорости, а величина - пропорциональна этой скорости.
Возможно применение и других вариантов съема сигнала, например, датчик может иметь два неподвижных катода и один подвижный анод, связанный с гиросконом.
Предмет изобретения
Датчик угловой скорости с гиросконом на пружинном нодвесе с двумя степенями свободы и с электронным преобразователем, отличающийся тем, что, с целью уменьщения моментов трения и габаритов датчика, и новышения точности его работы, гироскоп совместно с преобразователем электронного типа помещен в вакуумированный баллон.
J 4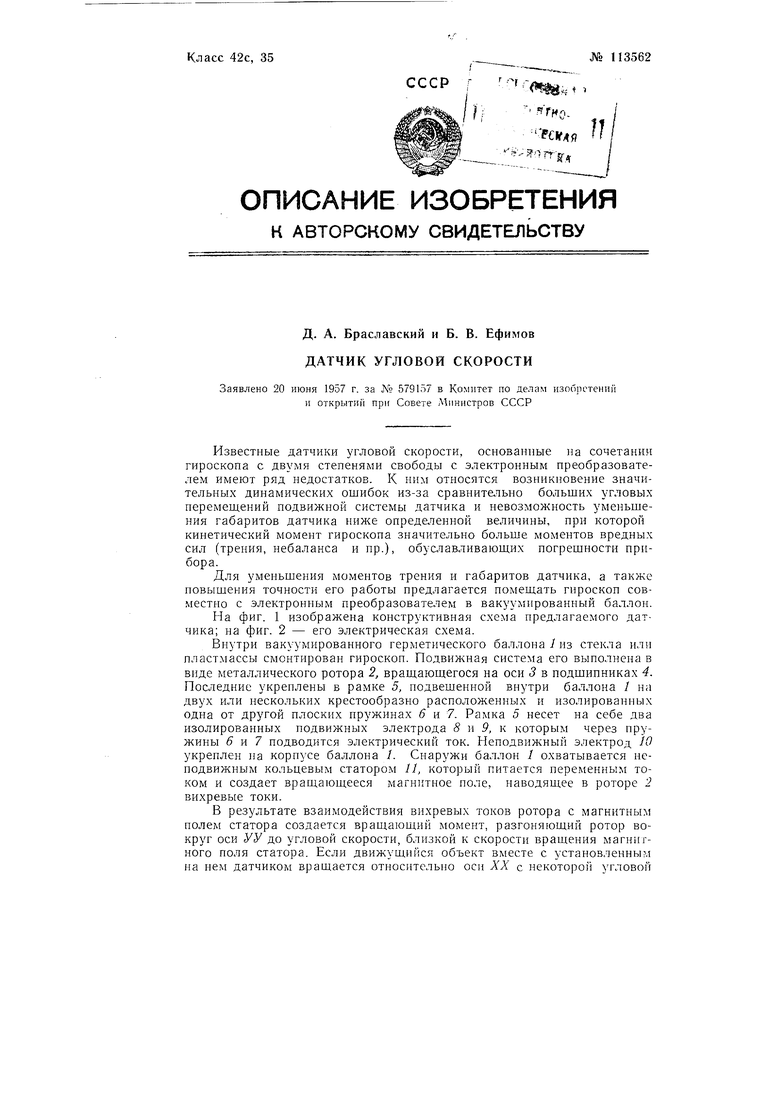
| название | год | авторы | номер документа |
|---|---|---|---|
| МОДУЛЯЦИОННЫЙ ГИРОСКОП | 2005 |
|
RU2303766C2 |
| ДАТЧИК УГЛОВОЙ СКОРОСТИ НА БАЗЕ МОДУЛЯЦИОННОГО ГИРОСКОПА | 2004 |
|
RU2276773C2 |
| Реле для регулятора расхода горючего | 1945 |
|
SU67362A1 |
| ДАТЧИК УГЛОВОЙ СКОРОСТИ С ТРЕХКРАТНОЙ МОДУЛЯЦИЕЙ ПОЛЕЗНОГО СИГНАЛА НА БАЗЕ МОДУЛЯЦИОННОГО ГИРОСКОПА С ИНДУКЦИОННЫМ ИЗМЕРИТЕЛЕМ МОДУЛЯЦИИ | 2008 |
|
RU2389031C1 |
| Гидродинамический гироскоп | 2021 |
|
RU2769078C1 |
| ГИРОСКОП | 2010 |
|
RU2446382C1 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 1999 |
|
RU2158902C1 |
| ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА | 2001 |
|
RU2206955C2 |
| КУРСОВАЯ СИСТЕМА | 2004 |
|
RU2279636C1 |
| КОЛЬЦЕВОЙ РЕЗОНАНСНЫЙ ГИРОСКОП СВЕРХВЫСОКОЧАСТОТНОГО ДИАПАЗОНА | 2001 |
|
RU2207511C1 |