:о сд
а
&о
9
Изобретение относится к промышленным манипуляторам, предназначенным для межоперационного перемещения заготовок.
Известен манипулятор, содержащий поворотную колонну, каретку с роликами, размещенную на этой колонне с возможностью вертикального перемещения, и механическую руку со с: ватом, размещенную на каретке при помощи роликов с возможностью возврат-г но-поступательного перемещения Q ,
Недостатком известного манипулятора является невозможность возвратно-поступательного движения каретки по вертикали, что требует дополнительных элементов и усложняет конструкцию.
Цель изобретения - упрощение конструкции.
Указанная цель достигается тем, что в манипуляторе, содержащем поворотную колонну, каретку с роликами размещенную на этой колонне с возможностью вертикального перемещения, и механическую руку со схватом, размещенную на каретке при помощи роликов с возможностью возвратно-поступательного перемещения, ролики перемещения руки и ролики перемещения каретки смонтированы на каретке на общих осях
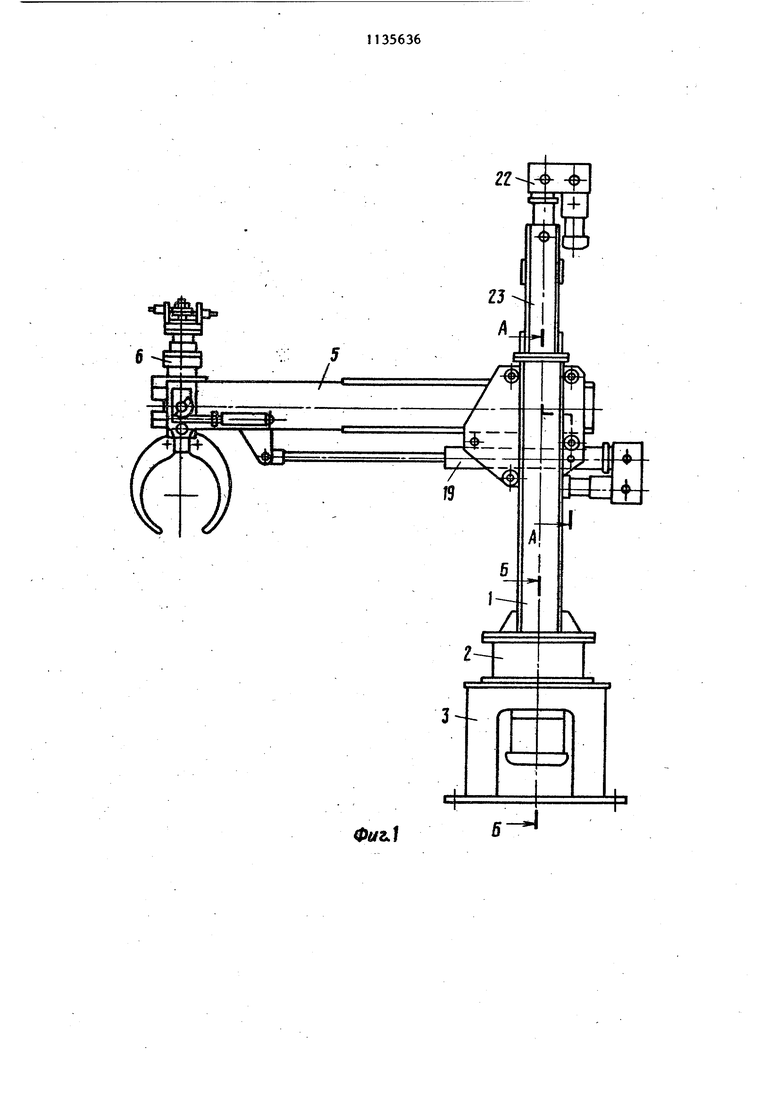
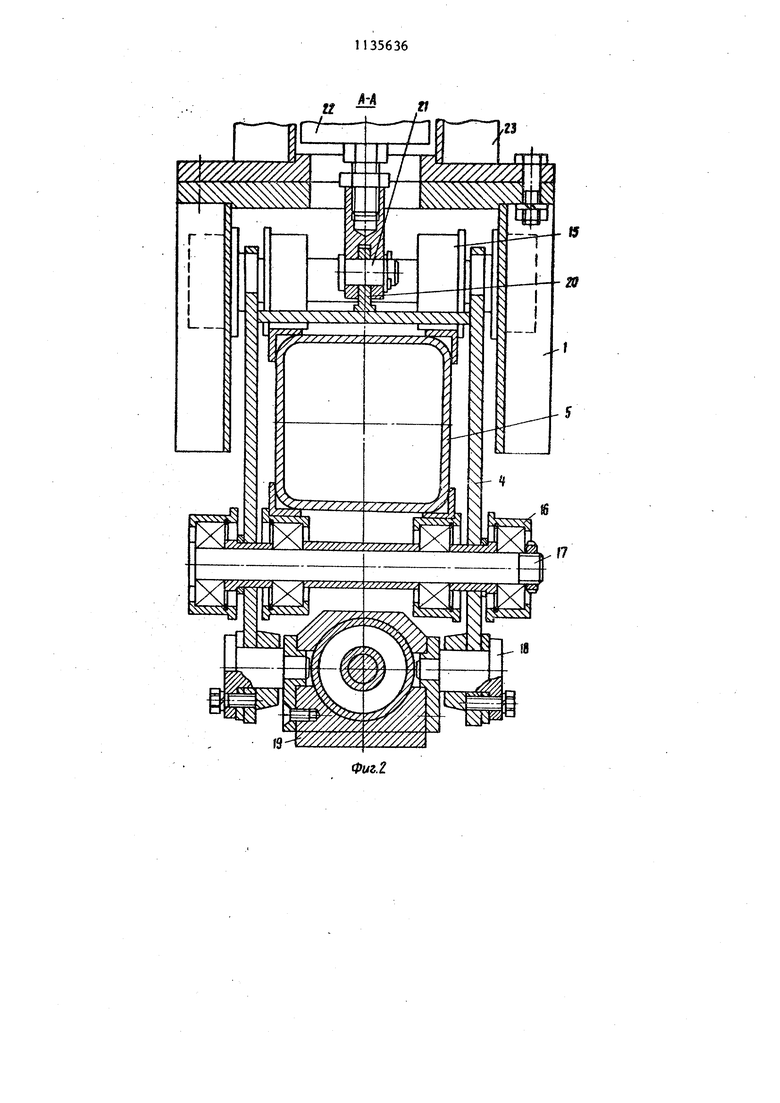
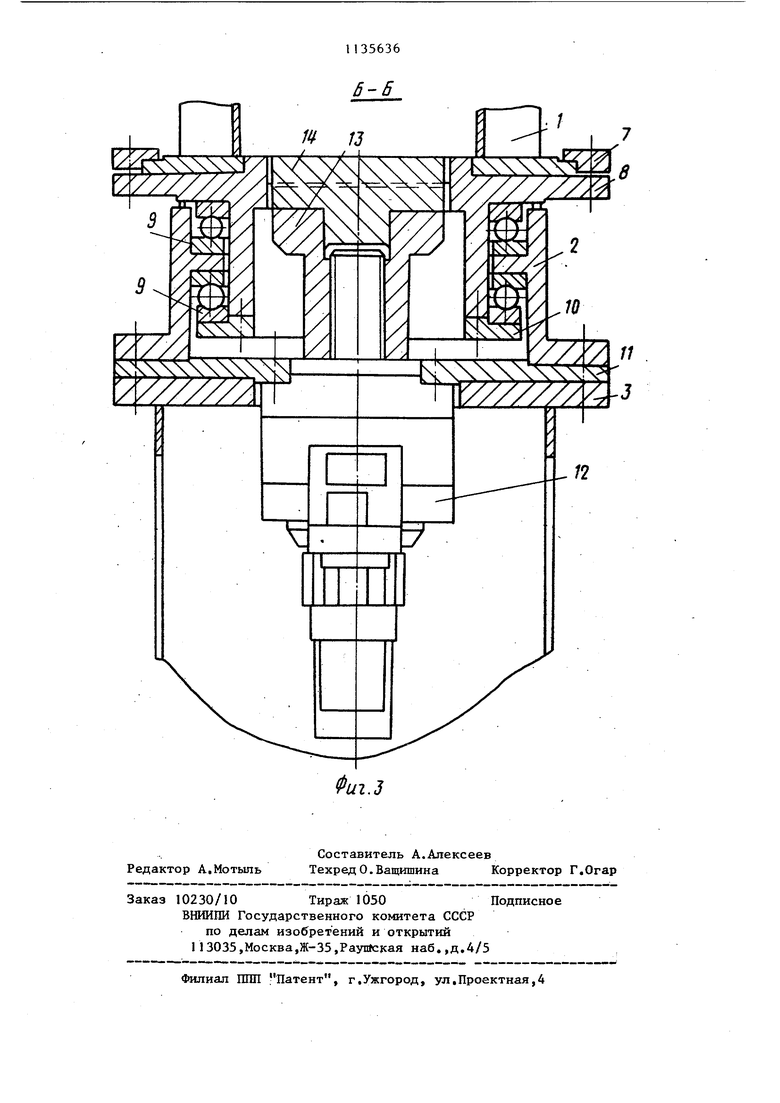
На фиг.I изображен манипулятор, общий вид; на фиг.2 - разрез А-А на фиг 1; на фиг,3 разрез Б-Б на фиг,
Манипулятор состоит из поворотной колонны 1, промежуточного стакана 2, основания 3, каретки 4, механической руки 5 и схвата 6.
Поворотная колонна 1 закреплена при помощи двух полуколец 7 на корпусе 8, который посредством упорг ных. подшипников 9 опирается на силовой внутренний пояс промежуточного стакана 2, Необходимый натяг в подшипниках 9 осуществляется при помощи крышки 10,
Промежуточный стакан 2 жестко . связан с основанием 3 через промежу точный фланец 11, к которому жестко крепится следящий привод 12 с полумуфтой 13, взаимодействующей с плавающим сзпсарем кулачково-дисковой муфты 14 л поворотной колонной Т.
Каретка 4 с внутренней стороны , имеет направляющие ролики 15, по которым движется механическая рука 5, ас наружной стороны - ролит ки 16, взаимодействуивдие с направлягщми плоскостями поворотной колонны 1 , при этом ролики установлены, на общих осях 17, закрепленных на боковинах каретки 4.
В нижней части каретки 4 установлены пальцы 18, на которых подвешен линейный электрогидравлический шаговый привод 19, взаимодействующий с механической рукой 5, В верхней части каретка 4 имеет проушину 20, при помощи которой посредством пальца 21 она взаимодействует с линейным электрогидравлическим шаговым приводом 22, подвешенным вертикально на промежуточной стойке 23, жестко связанной с поворотной колонной 1,
Манипулятор работает следующим образом.
Вращение колонны манипулятора осуществляется посредством следящег электропривода 12.
Вертикальное перемещение каретки и горизонтальное перемещение руки 5 осуществляется посредством связанных с ними линейных электрогидравлических шаговых приводов 9 и 22.
Угол поворота колонны 1 и величина линейных перемещений руки 5 по вертикали и горизонтали определяется числом поданных импульсов на электрогидравлические приводы 12,19 и 22.
Предложенный манипулятор в комплексе с автоматической системой управления позволяет устранить промежуточные элементы и устройства, обеспечивающие позиционирование исполнительных органов манипулятора в любой точке зоны обслуживания, чем достигается большая точность позиционирования по трем основным степеням свободы перемещения всей зоны обслуживания упрощение конструкции, компактность и улучшение эй:сплуатационных характеристик предлагаемого устройства.
15
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор, работающий в герметизированном объеме | 1990 |
|
SU1785897A1 |
| Манипулятор | 1976 |
|
SU538957A1 |
| Манипулятор | 1982 |
|
SU1138221A1 |
| Манипулятор | 1986 |
|
SU1430257A1 |
| Манипулятор для замены погружного стакана на слябовой машине непрерывного литья заготовок | 2016 |
|
RU2639089C2 |
| РОБОТИЗИРОВАННЫЙ МАНИПУЛЯТОР | 2003 |
|
RU2243881C2 |
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
| Устройство для перегрузки конусов электронно-лучевых трубок с транспортера печи отжига | 1990 |
|
SU1839168A1 |
| УСТРОЙСТВО ДЛЯ МОНТАЖА ИЗДЕЛИЙ ЭЛЕКТРОННОЙ ТЕХНИКИ НА ПЕЧАТНУЮ ПЛАТУ | 2001 |
|
RU2216887C2 |
| Устройство для подачи заготовок | 1988 |
|
SU1576276A1 |
МАНИПУЛЯТОР, содержащий поворотную колонну, каретку с роликами, размещенную на этой колонне с возможностью вертикального перемещения, и механическую руку со схватом, размещенную на каретке при помощи роликов с возможностью возвратно-поступательного перемещения, отличающийся тем, что, с целью упрощения конструкции, роли ки перемещения руки и ролики перемещения каретки смонтированы на каретке на общих осях.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Юревич Е.И | |||
| Устройство промышленных роботов | |||
| Л., Машиностроение, 1980, с.295,рис.У1.17 (прототип). | |||
