со
00 1C
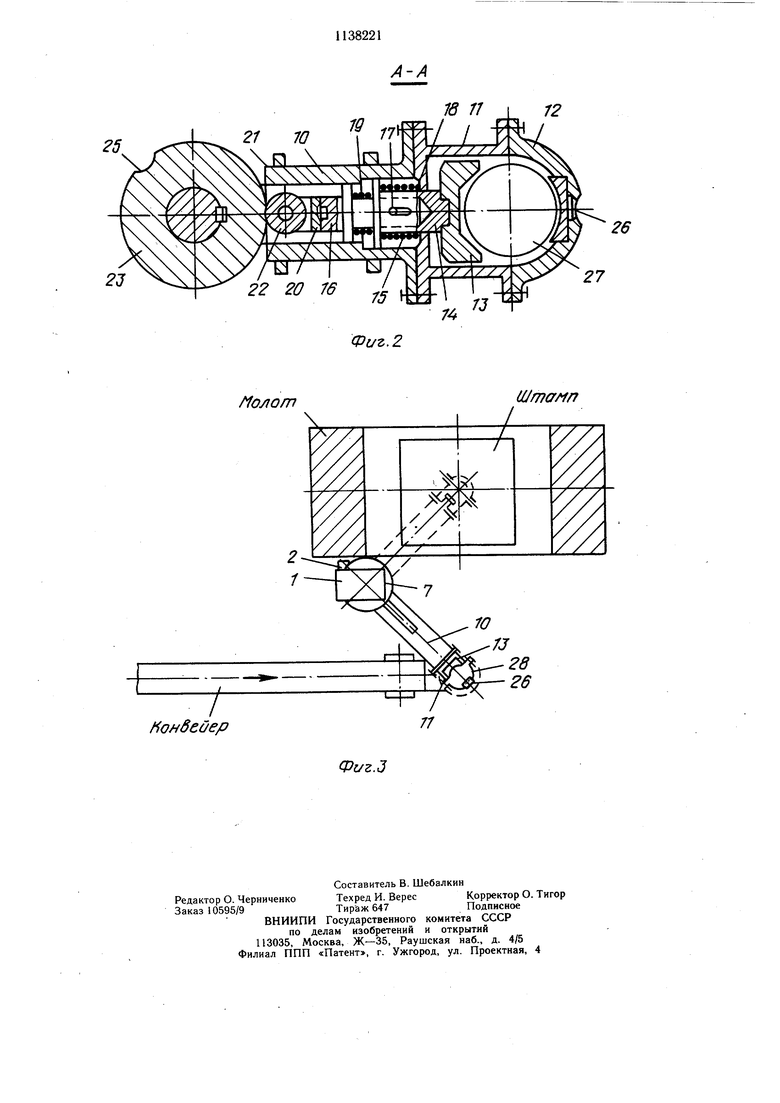
to Изобретение относится к вспомогательному оборудованию кузнечно-прессовых цехов, а именно к конструкциям манипуля торов, и может быть использовано при автоматизации процессов ковки и штамповки заготовок. Известен манипулятор, содержащий корпус со схватом, установленный на поворотном основании с возможностью качения в вертикальной плоскости, а также привод поворота основания и качания корпуса (1. Недостатками этого манипулятора являются его сложность и неточность работы. Наиболее близким к изобретению по технической сущности и достигаемому результату является манипулятор, содержа- -- - -- щин станину с установленной на ней поворотной колонной, кинематически связанной с щаговым реверсивным приводом, механическую руку с захватом, жестко связанную с колонной, и кулачковый механизм позиционирования захвата 2, Недостатками известного манипулятора являются его невысокие надежность и точность работы. Цель изобретения - повыщение надежности и точности позиционирования. Указанная цель достигается тем, что в манипуляторе, содержащем станину с установленной на ней поворотной колонной, кинематически связанной с шаговым реверсивным приводом, механическую руку с захватом, жестко связанную с колонной, и кулачковый механизм позиционирования захвата, колонна выполнена полой и установлена на станине при помощи неподвижной оси с возможностью перемещения вдоль нее, захват - в виде подпружиненной подвижной и неподвижной губок, а кулачковый механизм позиционирования захвата выполнен в виде жестко закрепленных на оси двух кулачков, образующие рабочих поверхностей которых расположены во взаимно перпендикулярных плоскостях, при этом кулачки расположены с возможностью взаимодействия соответственно с колонной вдоль оси и подвижной губкой при помощи закрепленных на них промежуточных элементов. При этом промежуточные элементы выполнены в виде роликов. На фиг. 1 изображен предлагаемый манипулятор, общий вид, разрез; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - манипулятор, вид в плане. Манипулятор содержит станину 1, на которой неподвижно закреплены пневмоцилиндр 2 и ось 3. На оси 3 установлена с возможностью вращения шестерня 4, связанная зацеплением с приводной рейкой 5 и неподвижно установленная на крышке 6 колонны 7. На колонне 7 установлены с возможностью вращения ролик 8, кинематически связанный с кулачком 9 подъема, и механическая рука 10 с промежуточным корпусом 11 и скобой 12. В руке 10 установлена губка 13, размещенная на направляющей втулке 14, которая подпружинена к промежуточному корпусу 11 пружиной 15. Внутри направляющей втулки 14 установлен шток 16 при помощи штифта 17, расположенного в пазу 18, и направляющей втулки 14. Шток 16 подпружинен к направляющей втулке 14 пружиной 19 и соединен с вилкой 20 в которой при помощи пальца 21 установлен с возможностью вращения ролик 22, кинематически связанный с кулачком 23 зажима, на котором выполнены пазы 24 и 25. Кулачок 23 неподвижно установлен на оси 3. В скобе 12 корпуса узла зажима установлена прижимная губка 26, а на станине 1 в крайних соответствующих точках поворота - конечные выключатели 27. Манипулятор работает следующим образом. При ходе пневмоцилиндра 2 рейка 5 вращает шестерню 4 и вместе с ней колон У Ролик 22, выходя из паза 24, через палец 21, вилку 20, шток 16, пружину 19 и направляющую втулку 14 перемещает губку 13, сжимая пружину 15. В этом положении заготовка 28, поданная, например, подающей плоскостью, зажимается губками 13 и 26. При дальнейшем ходе пневмоцилиндра 2 колонна 7, вращаясь с зажатой заготовкой, поднимается вследствие взаимодействия ролика 8 с винтовой поверхностью кулачка 9 подъема. При попадании ролика 22 в паз 25 пружина 15, разжимаясь, отводит губку 13 и освобождает заготовку. . ю .. Колонна 7 во время сброса заготовки нажимает на конечный выключатель 27 и манипулятор возвращается в исходное положение, где, нажимая другой конечный выключатель 27, получает в узел захвата следующую заготовку 28 и далее цикл повторяется. Использование изобретения позволяет повысить надежность и точность работы манипулятора.
Фиг. 2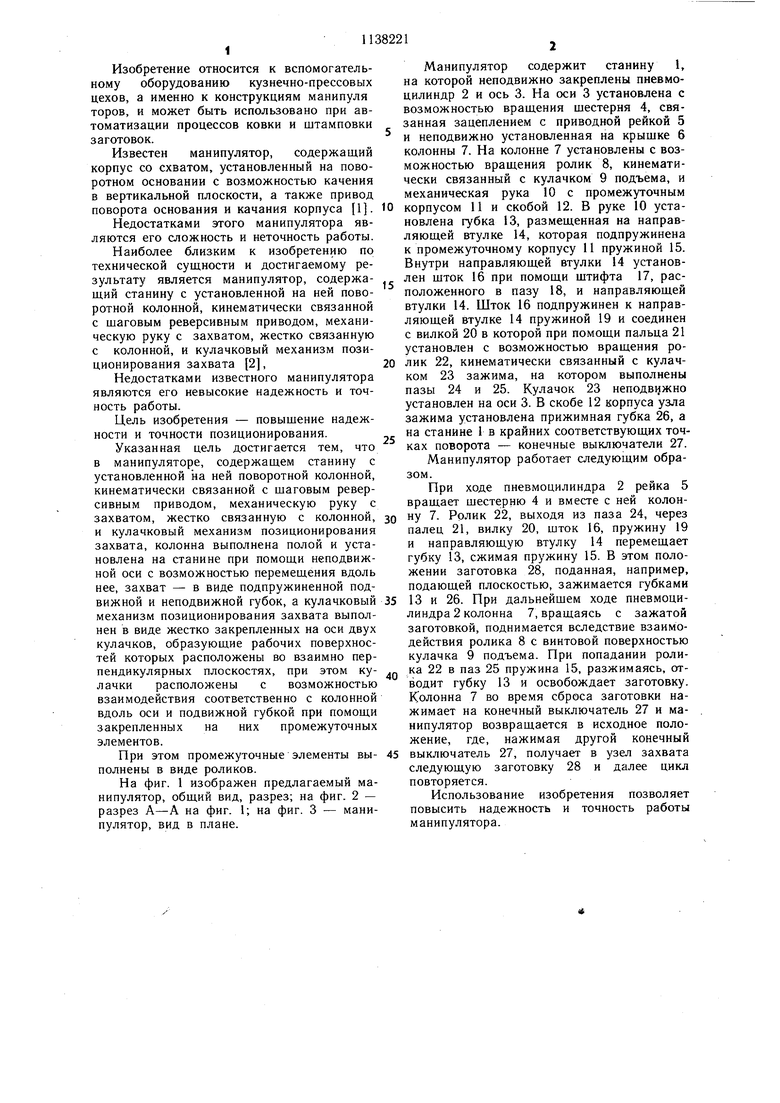
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1982 |
|
SU1013258A2 |
| Манипулятор | 1991 |
|
SU1813620A1 |
| Устройство для автоматической смены инструментов | 1978 |
|
SU772800A1 |
| Манипулятор | 1986 |
|
SU1430257A1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2346804C2 |
| Автооператор | 1988 |
|
SU1521576A1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2012 |
|
RU2521935C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ ТИПА ЧЕРВЯЧНЫЙ ХОМУТ И ПОЛУАВТОМАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2445180C1 |
| Манипулятор | 1985 |
|
SU1331638A1 |
| АВТОМАТ ДЛЯ ДВУСТОРОННЕЙ ВЫСАДКИ ДЕТАЛЕЙ СТЕРЖНЕВОГО ТИПА | 1971 |
|
SU307841A1 |

1. МАНИПУЛЯТОР, содержащий станину с установленной на ней поворотной колонной, кинематически связанной с шаговым реверсивным приводом, механическую руку с захватом, жестко связанную с колонной, и кулачковый механизм позиционирования захвата, отличающийся тем, что, с- целью повышения надежности и точности позиционирования, колонна выполнена полой и установлена на станине при помощи неподвижной оси с возможностью перемещения вдоль нее, захват - в виде подпружиненной подвижной и неподвижной губок, а кулачковый механизм позиционирования захвата выполнен в виде жестко закрепленных на оси двух кулачков, образующие рабочих поверхностей которых расположены во взаимно перпендикулярных плоскостях, при этом кулачки расположены с возможностью взаимодействия соответственно с колонной вдоль оси и подвижной губкой при помощи закрепленных на них промежуточных элементов. 2. Манипулятор по п. I, отличающийся тем, что промежуточные элементы выполСП нены в виде роликов.
Фиг.З
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Атрошенко А | |||
| П | |||
| Механизация и автоматизация горячей штамповки | |||
| М.-Л., «Машиностроение, 1965, с | |||
| Способ получения борнеола из пихтового или т.п. масел | 1921 |
|
SU114A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Манипулятор | 1978 |
|
SU774940A1 |
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
