to
15
20
1 - . 1305029
Изобретение относится к машиностроению, а именно к захватным устройствам манипуляторов.
Цель изобретения - расширение технологических возможностей.
На фиг.1 изображено захватное устройство, общий вид; на фиг.2 - сменная плата с губками; на фиг.З - разрез А-А на фиг.2; на фиг.4 - вид Б на фиг.1 на фиг.З -.разрез В-В на иг.4.
Захватное устройство состоит из корпуса 1 с размещенным в нем редуктором 2, двигателя 3, в корпусе 1 закреплены ходовые винты 4 с гайками 5, которые вставлены в обоймы 6 и контактируют с ними посредством тарельчатых пружин 7. Обоймы 6 имеют палец и по два выступа с П-образным пазом (фиг.З). На выходном валу реуктора 2 установлено коническое зубчатое колесо 8, находящееся в зацепении с ходовыми винтами 4. На корпусе 1 жестко закреплены ловители 9 с отверстиями.
Сменная плата с губками состоит из платы 10 с внешними и внутренними направляющими. На внутренних направляющих размещены ползуны 11 с закрепленными на них губками 12. Ползуны 11 имеют отверстия, в которые при стыковке входят пальцы обойм 6. На плате 10 установлены направляющие штыри 13, в отверстиях которых расположены стержни 14, снабженные пружинами 13, стержни 14 соединены с толкателем 16.Кроме того, к корпусу 1 прикреплены три датчика: датчик 17 выдает сигнал о наличии сменной платы с губками в зоне смены, а датчики 18 и 19 ограничивают рабочее перемещение ползунов 11 с закрепленными на них губками 12.
Количество ползунов 11, направляющих платы 10, обойм 6, ходовых винтов 4 и направляющих штырей 13 кратно количеству губок. Конструктивно захватное.устройство может быть выполнено с тремя или с двумя губками.
Закрепление сменной платы с губками на захватном устройстве происходит следующим образом.
При стыковке направляющие штыри 13, установленные на плате 10, входят в отверстия ловителей 9, закрепленных на корпусе 1, и ориентируют сменную плату с губками относительнооб ве 6 пл ко ка те ре ко 4, ке ни ст Па за це пр ны ру ва ре ща ус да По пр вр 4 га ст дв об ре сх ну пр на ни ля ню ля зу до пр ту за ты пе ны
30
35
40
45
50
55
та но пе дв ся за ты ту ща
5
0
но корпуса 1, одновременно пальцы обойм 6 входят в соответствующие отверстия ползунов 11, а выступы обойм 6 с П-образными пазами - в вырезы платы 10. После выдачи сигнала датчиком 17 о наличии сменной платы с губками в зоне смены включается двигатель 3. Вращение от двигателя 3 через редуктор 2, коническое зубчатое колесо 8 передается на ходовые винты 4, вращение которых по часовой стрелке вызывает поступательное перемещение гаек 3 и связанных с ними посредством тарельчатых пружин 7 обойм 6. Пальцы обойм перемещают ползуны 11 с закрепленными на них губками 12 от центра. При перемещении обойм 6 направляющие платы 10 входят в П-образ- ные пазы на выступах обойм 6 и фиксируют сменную плату с губками на захватном устройстве. Ползуны 11 с закрепленными на них губками 12 перемещаются в рабочую зону, ограниченную с датчиками 18, губки 12 расходятся. После установки детали в губки 12 происходит переключение направления вращения ,двигателя 3, ходовые винты 4 вращаются против часовой стрелки, гайки 3 и связанные с ними посредством тарельчатых пружин 7 обоймы 6 двигаются поступательно и пальцы обойм 6 перемещают ползуны 11 с закрепленными на них губками 12, которые сходятся и зажимают деталь на наружную поверхность, причем тарельчатые пружины 7, сжимаясь, создают усилие на губках 12, достаточное для удержания детали после отключения двигателя J. Для захвата детали за внутреннюю поверхность вращение от двигателя 3 через редуктор 2, коническое зубчатое колесо 8 передается на ходовые винты 4. Вращение последних против часовой стрелки вызывает поступательное перемещение гаек 3 и связанных с ними посредством тарельчатых пружин 7 обойм 6. Пальцы обойм 6 перемещают ползуны 11 с закрепленными на них губками 12 .к центру схва0
5
0
5
0
55
та, губки 12 сходятся. После установки детали в губки 12 происходит переключение направления вращения двигателя 3, ходовые винты 4 вращаются по часовой стрелке, гайки 3 и связанные с ними посредством тарельчатых пружин 7 обоймы 6 движутся поступательно, и пальцы обойм 6 перемещают ползуны 11 с закрепленными на
них губками от центра cxsata, губки 12 расходятся и зажимают деталь за внутреннюю поверхность.
Формула .изобретения
1. Захватное устройство, содержащее корпус, ползуны с закрепленными на них губками, связанные с приводом, отличающееся тем, что, с целью расширения технологических возможностей, оно снабжено сменной платой с внешними и внутренними направляющими и центрирующими штырями, причем ползуны размещены на внутренних направляющих сменной платы, цент
рирующие штыри расположены в отверстиях ловителей корпуса перпендикулярно плоскости перемещения ползунов, а каждый выходной элемент перемещения ползунов выполнен с П-образными пазами, охватывающими внешние направ- сменной платы, и снабжен дополнительно введенным пальцем, размещенным в отверстии ползуна, k
2. Устройство по П.1, отличающееся тем, что сменная плата снабжена подпружиненным толкателем с направляющими стержнями,расположенными в отверстиях центрирующих штырей.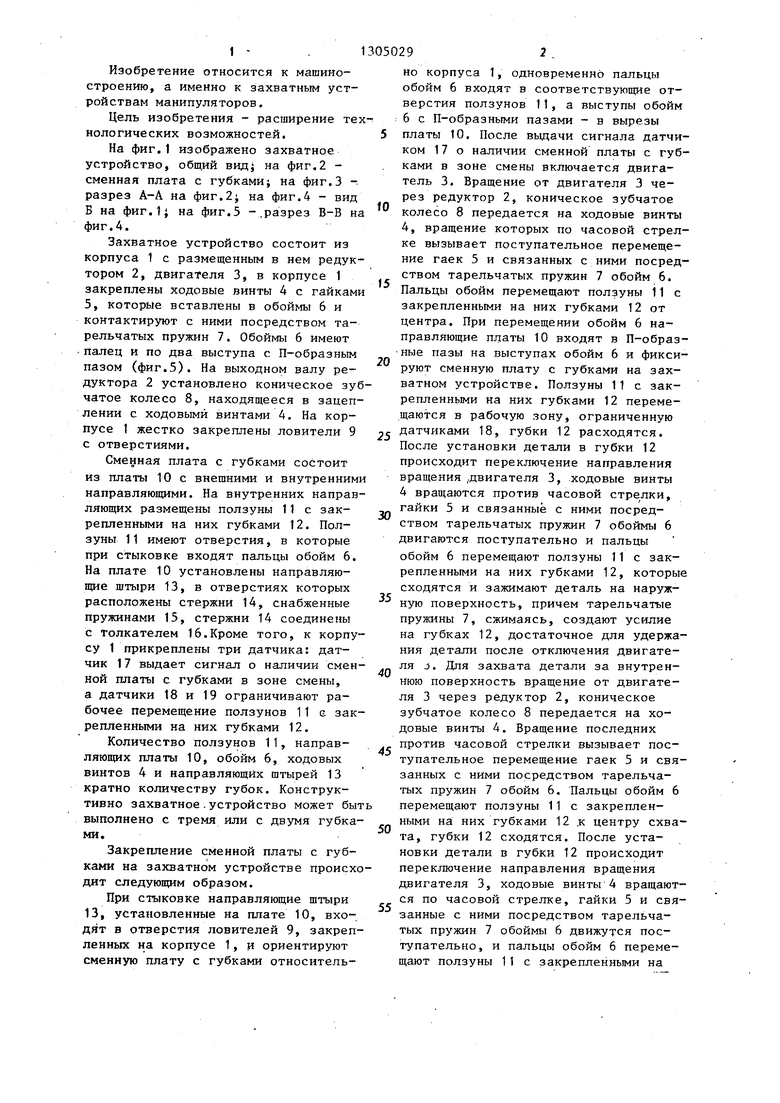
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватная головка манипулятора | 1986 |
|
SU1342727A1 |
| Многооперационный станок | 1984 |
|
SU1212753A1 |
| ЛЕНТОЧНО-ПИЛЬНЫЙ СТАНОК | 1998 |
|
RU2139182C1 |
| Захват промышленного робота | 1987 |
|
SU1509247A1 |
| Автооператор для смены инструментальных наладок | 1986 |
|
SU1426744A1 |
| Устройство для замены штампов на прессах | 1986 |
|
SU1382574A1 |
| Манипулирующее устройство для съема, кантования и выдачи изделий с пресса | 1987 |
|
SU1512775A1 |
| Гибкий производственный модуль для штамповки изделий из ленточного материала | 1989 |
|
SU1713709A1 |
| Устройство для формования изделий "мюзле | 1977 |
|
SU751485A1 |
| Устройство для подачи полосового и ленточного материала в рабочую зону пресса | 1986 |
|
SU1349853A1 |

Изобретение относится к машиностроению, а именно к захватным устройствам манипуляторов. Целыбизобретения является расширение технологических возможностей. При стыковке направляющие штыри 13, установленные на плате 10, входят в отверстия ловителей 9, закрепленных на корпусе 1, и ориентируют сменную плату с губками относительно корпуса 1, одновременно пальцы обойм 6 входят в отверстия ползунов 11, а выступы обойм с П-образными пазами - в вырезы платы 10. Включается двигатель 3, вращение ходовых винтов 4 вызывает поступательное перемещение гаек 5 и обойм 6,. пальцы обойм перемещают ползуны 11 с закрепленными губками 12, При перемещении обойм 6, направляющие пллгы 10 входят в П-образные пазы на выступах обойм 6 и фиксируют сменную плату с губками на захватном устройстве. 1 3.п. ф-лы, 5 иЛ. с 9 Ю О /V (Л ZZ ./
76
0UZ.Z
А-А
10
14 75
/б
Фиг.З
18
Фиг.5
Составитель А. Алексеев Редактор Н. Бобкова Техред Л.Сердюкова Корректор М.Самборская
1373/14
Тираж 954 Подписное ВНИИПИ Государственного комитета СССР
по делам .изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная.4
| Схват | 1982 |
|
SU1057272A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
