Изобретение относится к машиностроению и может найти нрименение в конструкциях промышленных роботов и манипуляторов, обслуживаюш.их станочные автоматические линии.
Цель изобретения - повышение надежности в работе.
На..чертеже схематически представлено предлагаемое устройство.
Захватное устройство содержит корпус 1, .блоки. ,-замкнутый гибкий элемент 8, взаимодействуюш,ий с блоками 2-7, пальцы 9-11, соединенные с гибким элементом 8, ползун 12, привод 13 перемещения ползуна 12, направляюш,ие 14 и 15 перемеш,ения первого 9 и второго 10 пальцев, установленные на корпусе 1 и выполненные в виде рычагов первого рода, каждый из которых взаимодействует одним из своих концов с одним из двух подпружиненных штоков 16 или 17, расположенных на ползуне 12, на других концах рычагов закреплены блоки 4 и 7, третий палец 11 размещен на ползуне 12 с возможностью перемещения вдоль его оси S-S и снабжен двумя дополнительными блоками 18 и 19. Ползун 12 снабжен четырьмя дополнительными блоками 20-23. Кроме того, на ползуне 12 размещен клин 24, снабженный приводом 25 его перемещения вдоль оси S-S захватного устройства и взаимодействующий с другими концами штоков 16 и 17.
Устройство работает следующим образом.
Перед захватом детали последняя находится, например, в ячейке тары. Вследствие того, что ползун 12 взаимодействует через гибкий элемент 8 с пальцами 9-11, то при включении привода 13 пальцы 9-11 перемещаются до тех пор, пока деталь не захвачена.
Предположим, что центр детали смещен от оси захватного устройства. Палец 9, взаимодействуя с деталью, совершает поворот и удерживается в этом положении под
воздействием подпружиненного щтока 16. Палец 10 под воздействием подпружиненного штока 17, поворачивается до соприкосновения с деталью, после чего перемещение пальцев 9 и 10 по направляющим 14 и 15 прекращается вследствие упругости подпружиненных щтоков 16 и 17. При дальнейшем перемещении ползуна 12 палец И перемещается до соприкосновения с деталью. Для установки захваченной детали на продольную ось S-S захватного устройства срабатывает привод 25. Клин 24, взаимодействуя с подпружиненными штоками 16 и 17, возвращает пальцы 9 и 10 в положение совпадения центра детали с продольной осью захватного устройства.
Формула изобретения
Захватное устройство, содержащее кор- 0 пус с установленными на нем блоками с охватывающим их гибким элементом, с которым жестко соединены первый и второй пальцы, размещенные на соответствующих направляющих, а также ползун с приводом перемещения и третий палец, установленный на ползуне, отличающееся тем, что, с целью повышения надежности работы, оно снабжено двумя двуплечими рычагами, шар- нирно установленными на корпусе, на первом плече каждого из них выполнены на- 0 правляющие соответствуюших пальцев, а также установлен один из блоков, ползун снабжен двумя подпружиненными относительно друг друга штоками, клином с приводом его перемещения и дополнительными блоками, причем клин размещен между 5 штоками, внешние концы которых расположены с возможностью взаимодействия с вторыми плечами двуплечих рычагов, кроме того, третий палец установлен на ползуне с возможностью перемещения вдоль оси ползуна, а на его концах установлены два дополнительных блока, причем четыре дополнительных блока установлены на ползуне.
0
| название | год | авторы | номер документа |
|---|---|---|---|
| Магазин деталей | 1981 |
|
SU984809A1 |
| Самоцентрирующий патрон | 1985 |
|
SU1282973A1 |
| Захватное устройство | 1987 |
|
SU1504092A1 |
| Грузозахватное устройство | 1977 |
|
SU727551A1 |
| Устройство для перемещения деталей с рабочей позиции пресса | 1981 |
|
SU967632A1 |
| Автоматический ключ для свинчивания и развинчивания насосных штанг | 1986 |
|
SU1350325A1 |
| Установочная каретка для центрирования и зажима грифов музыкальных инструментов | 1985 |
|
SU1276492A1 |
| Захват промышленного робота | 1987 |
|
SU1509247A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ТОЛЩИНЫ ДЕТАЛИ | 1991 |
|
RU2016370C1 |
| Выключатель подачи | 1990 |
|
SU1794559A1 |
Изобретение относится к области машиностроения и может найти применение в промышленных роботах и манипуляторах, обслуживающих станочные автоматические линии. Целью изобретения является повышение надежности работы. Ползун 12, перемещаясь в корпусе 1, взаимодействует через гибкий элемент 8 с пальцами 9, 10, 11, которые перемещаются до захвата детали. При смещении центра детали относительно оси захватного устройства один из пальцев взаимодействует с деталью и поворачивается вместе с рычагом до тех пор, пока другой палец не коснется детали. Для совмещения центра захваченной детали с осью захватного устройства срабатывает привод 25, перемещая клин 24, который, взаимодействуя со щтоками 16 и 17, возвратит пальцы 9 и 10 в положение совпадения центра детали с осью захватного устройства. 1 ил. 7J сл 00 со о со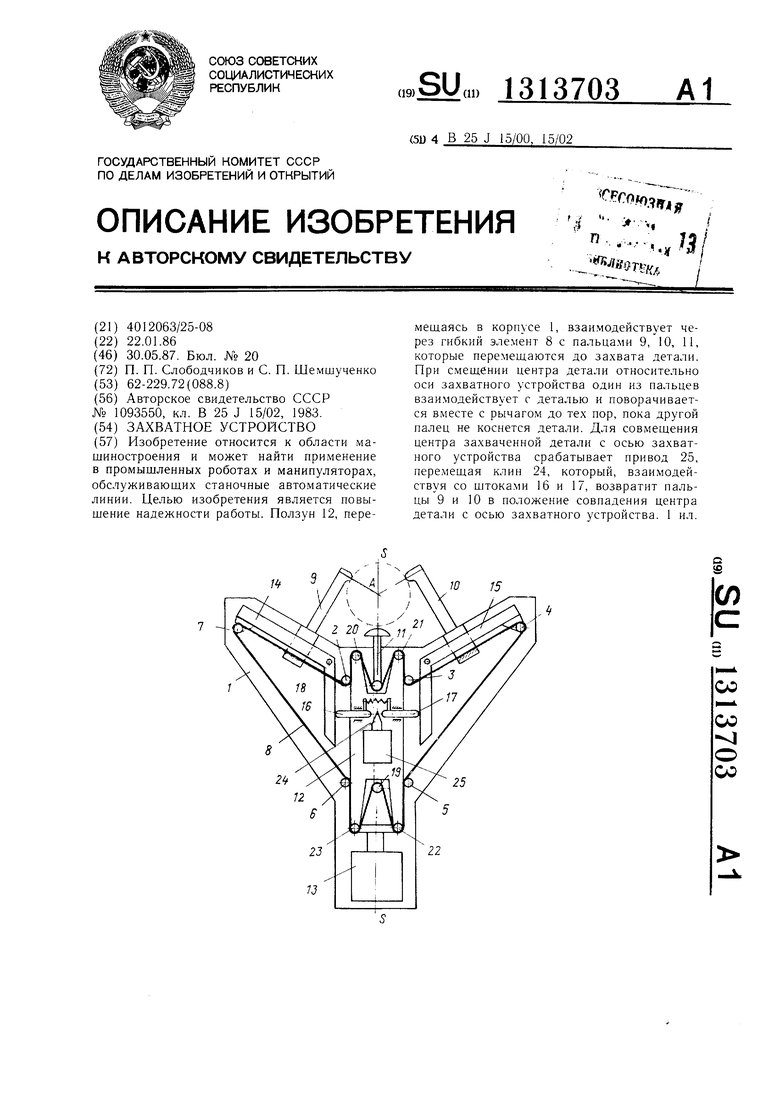
| Схват манипулятора | 1983 |
|
SU1093550A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
