В вычислительной технике и автоматике известны устройства для управления автоматическими линиями обработки деталей, содержащие программное устройство, устройство для управления горизонтальным перемещением автооператора и вертикальным перемещением траверсы автооператора с деталями.
Предлагаемое устройство отличается от известных тем, что в нем блок программ связан с блоком совпадения, блоком горизонтального перемещения, блоком вертикального перемещения траверсы автооператора, блоком переключения команд. Блок совпадения подсоединен к блоку горизонтального перемещения и к блоку вертикального перемещения. Входы блока переключения команд соединены с блоком вертикального перемещения и с источником питания, подключенным ко всем блокам устройства. Блок горизонтального перемещения связан с блоком вертикального перемещения.
Такое выполнение устройства позволяет упростить ввод новых программ.
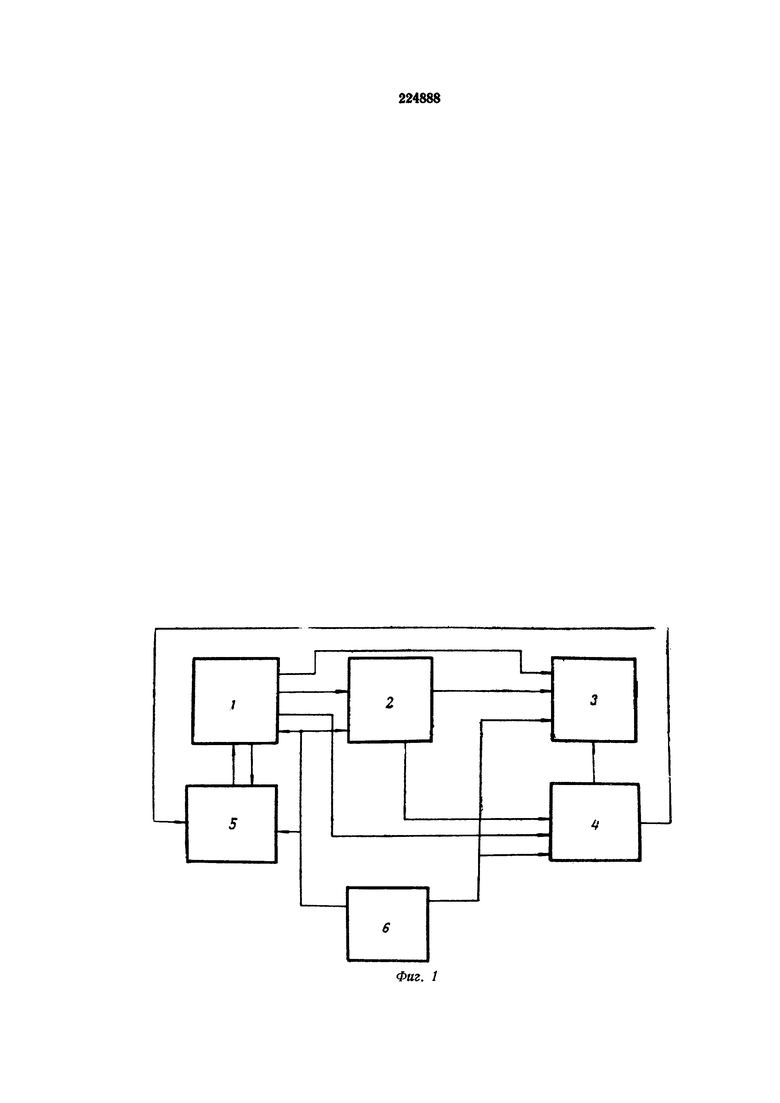
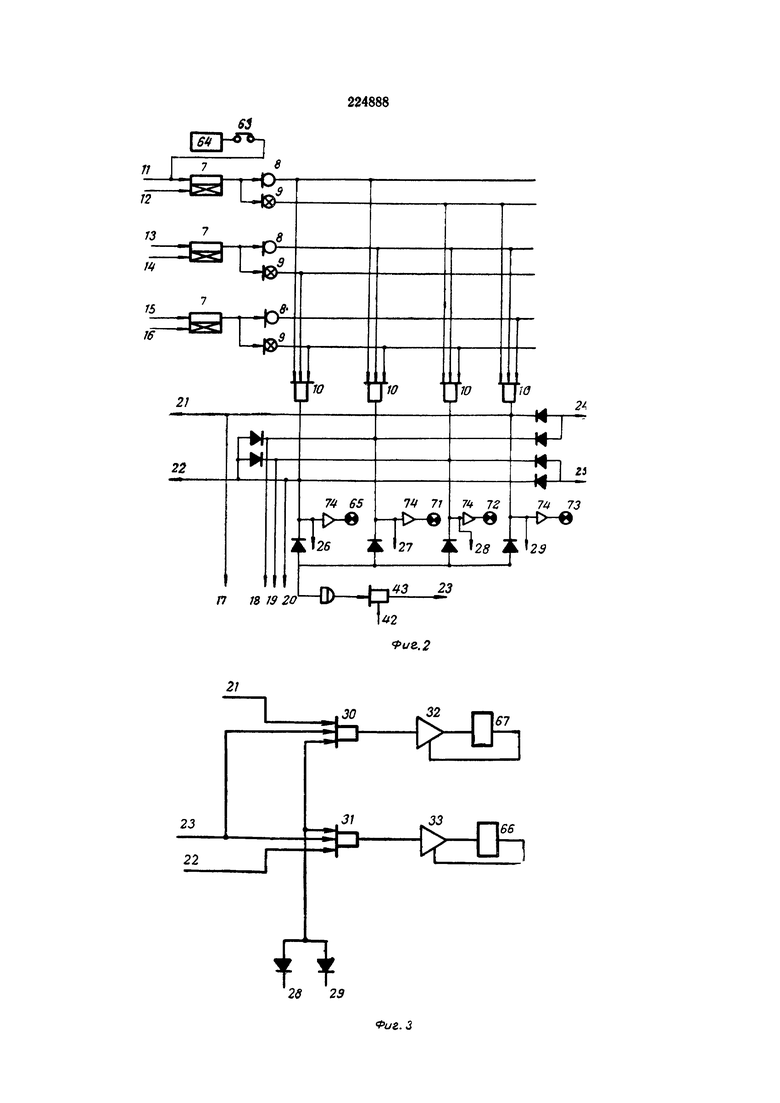
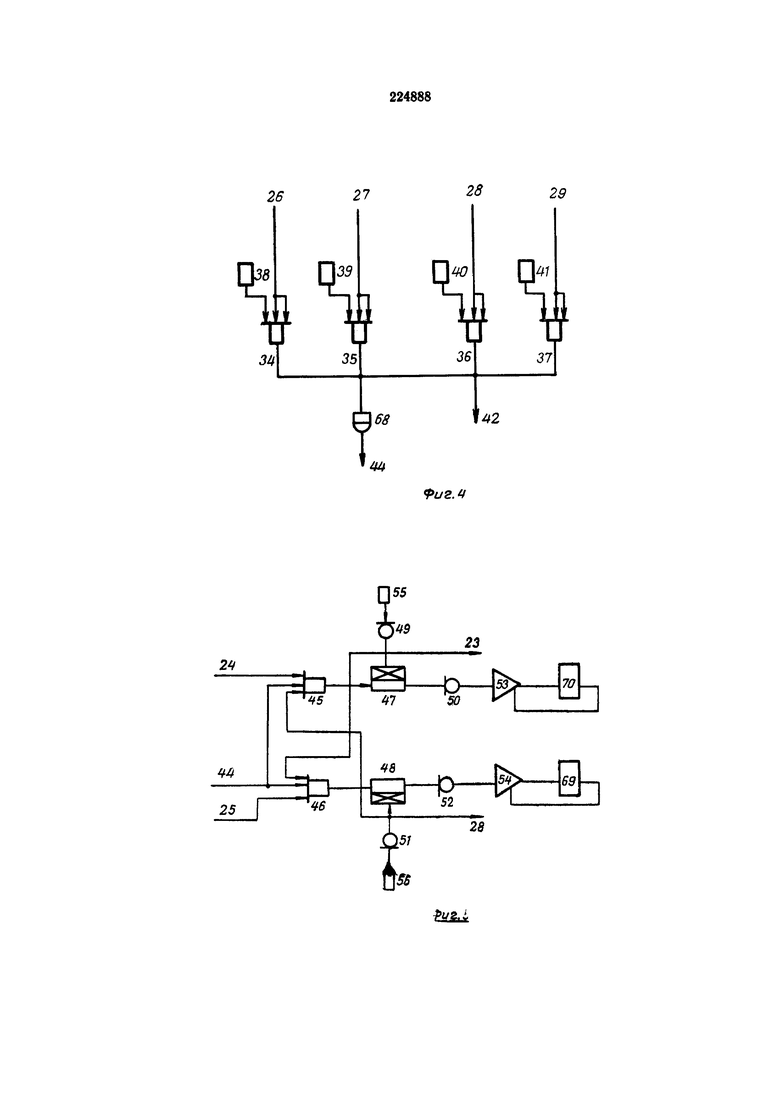
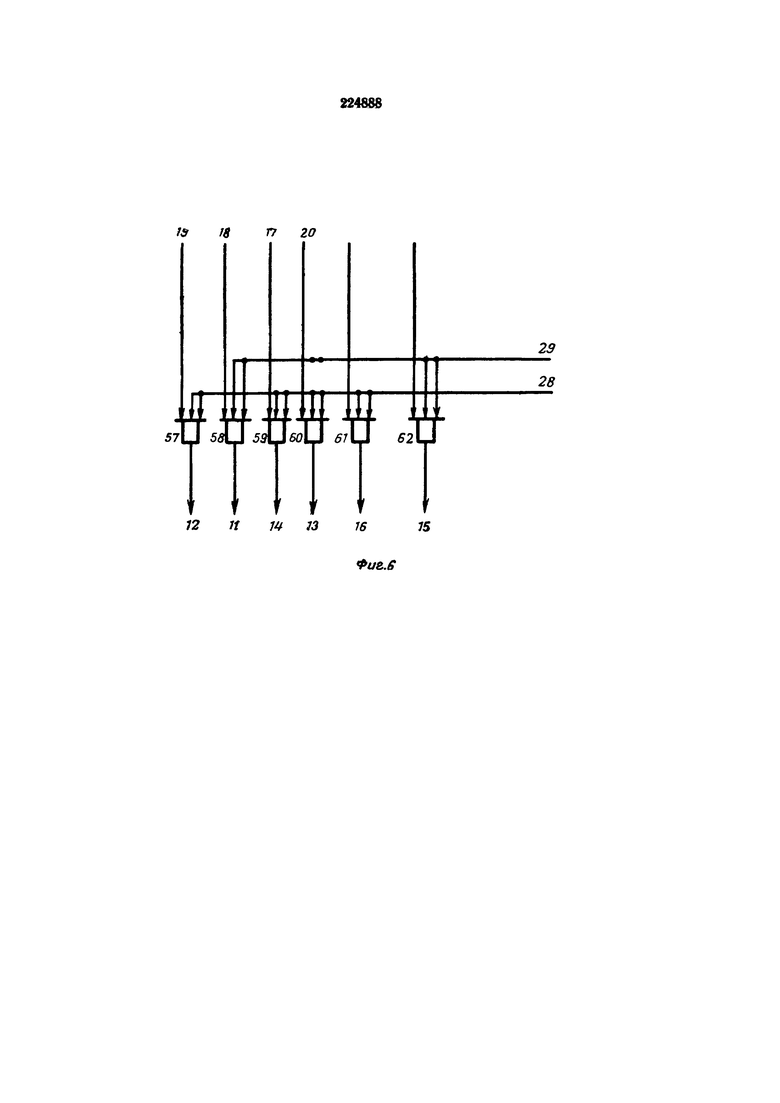
На фиг. 1 представлена блок-схема командоаппарата; на фиг. 2 - схема программного устройства; на фиг. 3 - схема управления горизонтальным перемещением автооператора; на фиг. 4 - схема блока совпадения; на фиг. 5 - схема управления вертикальным перемещением автооператора; на фиг. 6 - схема блока переключения командоаппарата.
Командоаппарат (фиг. 1) состоит из отдельных блоков: блока 1 программ, блока 2 совпадения, блока 3 горизонтального перемещения, блока 4 вертикального перемещения и блока 5 переключения команд. Питание всех блоков осуществляется от одного источника 6 питания.
Каждый блок представляет собой определенную совокупность магнитных логических элементов, соединенных таким образом, что обеспечивается выдача одной определенной команды для выполнения операции в соответствии с программой.
Программное устройство (фиг. 2) состоит из магнитных логических элементов 7, выполняющих функцию запоминания и т.д., элементов 8 «ИЛИ» и т.д., элементов 9 «НЕ», элементов 10 «И» и элемента «ИЛИ» с запретом на выходе командного сигнала. На элементах 7 запоминания записывается программа каждого технологического процесса обработки деталей. К элементам запоминания подключены элементы «ИЛИ», «НЕ», «И», обеспечивающие выдачу одной команды на каждую операцию, поэтому количество выходов программного устройства определяется количеством операций в цикле обработки.
Каждый элемент запоминания программного устройства соединен двумя выходами блока переключения команд, при этом один выход выдает сигнал элементу запоминания, второй - снимает этот сигнал.
Входы 11-16 подключены к элементам 7.
Выходы (шины) 17-20 элементов соединены с блоком переключения команд, выходы (шины) 21-23 - с блоком горизонтального перемещения, выходы (шины) 24-25 - с блоком вертикального перемещения, выходы (шины) 26-29 - с блоком совпадений.
Блок горизонтального перемещения (фиг. 3) состоит из магнитных логических элементов «И» 30 и 31 и магнитных усилителей 32 и 33, соединенных последовательно. При этом элементы «И» соединены с выходами 21 и 22 программного устройства и блокировочными выходами 28 и 29 блока вертикального перемещения.
Блок совпадений (фиг. 4) состоит из магнитных логических элементов «И» 34-37 и т.д., соединенных с выходами 26-29 программного устройства и бесконтактными конечными переключателями 38-41 и.т.д., установленными над каждой позицией обработки деталей. Выход (шина) 42 блока совпадений соединен с элементом 43 «ИЛИ» с запретом программного устройства, выход (шина) 44 - с элементами «И» блока вертикального перемещения.
Блок вертикального перемещения (фиг. 5) состоит из магнитных логических элементов «И» 45 и 46, запоминающих ячеек 47 и 48, схем «ИЛИ» 49-52, магнитных усилителей 53 и 54 и бесконтактных конечных переключателей 55 и 56, соединенных таким образом, что конечный переключатель 55, ограничивающий подъем деталей, воздействует на элемент «И» 46 и подготавливает цепь для перемещения деталей вниз, а конечный переключатель 56 воздействует на элемент «И» 46 и подготавливает цепь подъема деталей. Одновременно конечные переключатели 55 и 56 соединены с элементами «И» блока горизонтального перемещения и блока переключения команд. Элементы «И» соединены с выходами 24 и 25 программного устройства и с выходом 44 блока совпадения.
Блок переключения команд (фиг. 6) состоит из магнитных логических элементов «И» 57-62, соединенных с выходами 17-20 и т.д. программного устройства и с выходами 28 и 29 блока вертикального перемещения. Выходы элементов «И» соединены попарно с элементами запоминания программного устройства.
Нажатием кнопки 63 сигнал подается от входного трансформатора 64 на вход элементов 7. На выходе элементов 7 появляется сигнал, который поступает на входы элементов 8 и 9.
При этом на входе элемента 7 появляются три сигнала, на его выходе - командный сигнал. Этот сигнал задает следующие команды. Горизонтальное перемещение вправо (шина 21) или влево (шина 22), включает световую сигнализацию (лампа 65) на позиции обработки, над которой автооператор должен производить операцию, подготавливает направление движения деталей (шина 25) или вниз (шина 24), подготавливает смену команды в блоке переключения команд по шинам 17-20 и подает команду на движение автооператора в горизонтальном направлении по шине 23, а также выдает сигнал по шинам 26-29 в схему блока совпадения.
В случае необходимости горизонтального перемещения влево на вход элемента 31 (фиг. 3) поступают сигналы по шинам 22 и 23 от программного устройства и один из блокировочных сигналов по шинам 28 и 29 из схемы блока вертикального перемещения (фиг. 5).
На вход элемента 31 подано три сигнала, поэтому с его выхода сигнал поступает на вход выходного магнитного усилителя 33. Нагрузкой усилителя служит катушка магнитного пускателя 66. Магнитный пускатель нормально открытыми контактами включает электродвигатель горизонтального перемещения, при этом автооператор производит движение влево.
При движении автооператора вправо сигналы поступают от программного устройства по шинам 21 и 23 на вход элемента 30, выходной усилитель 32 с нагрузкой 67. Последний включает электродвигатель автооператора.
При движении автооператора вправо или влево он специальной пластиной (датчиком) последовательно перекрывает конечные переключатели 38-41, установленные на каждой позиции обработки. Останов происходит только тогда, когда пластина автооператора перекрывает конечный переключатель и одновременно из программного устройства (фиг. 2) будет подан сигнал на один из элементов блока совпадения. В данном случае автооператор перекрывает конечный переключатель 38, сигнал по шине 26 поступает на элемент 34. На входы блока 5 поступает одновременно три сигнала, поэтому на выходе появляется сигнал по шине 42, который поступает на вход элемента 43 (запрет) программного устройства (фиг. 2) и на элемент 68 задержки (фиг. 4). На выходе элемента 43 сигнал по шине 23, ранее поступивший в схему блока горизонтального перемещения, пропадает, и происходит останов автооператора. С выхода элемента 68 сигнал по шине 44 поступает в схему блока вертикального перемещения (фиг. 5).
Из схемы программного устройства (фиг. 2) на элемент 46 блока вертикального перемещения был выдан сигнал по шине 25 (при останове оператора), из схемы совпадения (фиг. 4) поступает сигнал по шине 44 и поступает сигнал от конечного переключателя 55, фиксирующего нижнее положение деталей. На элемент 46 поступают три сигнала, а потому появляется сигнал на выходе.
С выхода элемента 46 сигнал поступает на вход ячеек 48 и через схему 52 - на вход выходного магнитного усилителя 54. Нагрузкой этого усилителя служит катушка магнитного пускателя 69, который нормально открытыми контактами включает электродвигатель вертикального перемещения траверсы автооператора с деталями (траверса автооператора поднимается вверх). Достигнув верхнего положения, траверса автооператора перекрывает ограничивающий верхнее движение бесконтактный переключатель 56. Поэтому на вход ячеек 48 через схему 51 поступает запрещающий сигнал по шине 28, который отключает магнитный пускатель 69, а тот, в свою очередь, - электродвигатель вертикального перемещения. Одновременно сигнал по шине 28 поступает на переключатель 41, подготавливая цепь пуска траверсы автооператора с деталями, в схему блока горизонтального перемещения (фиг. 3) и в схему переключения команд (фиг. 6).
При выдаче команды по шине 24 из программного устройства сигнал с элемента 45 поступает на вход ячеек 47 и схему 50, на выходной магнитный усилитель 53 (нагрузкой последнего служит катушка магнитного пускателя 70, нормально-открытые контакты которого включают электродвигатель вертикального перемещения). Траверса автооператора в этом случае движется вниз до ограничения конечным переключателем 55.
Ранее из схемы программного устройства (фиг. 2) был подан сигнал по шине 20 на элемент 60. При поступлении из схемы блока
вертикального перемещения (фиг. 5) сигнала по шине 28 на выходе элемента 60 появляется сигнал, который поступает на вход второго элемента 7 схемы программного устройства (фиг. 2), а с его выхода - на вход элементов 8 и 9. Следовательно появляется сигнал с выхода элементов 10, который обеспечивает выполнение следующей операции.
Лампы 71-73, а также усилители 74 выполняют функции, аналогичные функциям лампы 65 и усилителя 74.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления полуавтоматическими линиями обработки деталей в жидкостях | 1982 |
|
SU1120037A2 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ АВТОМАТИЧЕСКИМИЛИНИЯМИ | 1972 |
|
SU336648A1 |
| ВСЕСОЮЗНАЯ):.:|[НТШ-Т[ХНН4Е | 1973 |
|
SU367412A1 |
| Устройство для управления автома-ТичЕСКиМи лиНияМи | 1979 |
|
SU840804A1 |
| Устройство для управления автоматическими линиями гальванопокрытий | 1983 |
|
SU1095136A1 |
| Устройство программного управления автооператорами многопроцессных автоматических линий гальванопокрытий | 1982 |
|
SU1081243A1 |
| Устройство для управления автоматическими линиями | 1980 |
|
SU954939A2 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ ПОЛУАВТОМАТИЧЕСКИМИ ЛИНИЯМИ ОБРАБОТКИ ДЕТАЛЕЙ В ЖИДКОСТЯХ | 1970 |
|
SU261085A1 |
| Устройство для управления автоматическими линиями обработки деталей | 1983 |
|
SU1135820A1 |
| Устройство для управления автоматическими линиями | 1978 |
|
SU750440A1 |
Устройство для управления автоматическими линиями обработки деталей, содержащее программное устройство, устройство для управления горизонтальным перемещением автооператора и вертикальным перемещением траверсы автооператора с деталями, отличающееся тем, что, с целью упрощения ввода новых программ, в нем блок программ связан с блоком совпадения, блоком горизонтального перемещения, блоком вертикального перемещения траверсы автооператора, блоком переключения команд, блок совпадения подсоединен к блоку горизонтального перемещения и к блоку вертикального перемещения, входы блока переключения команд соединены с блоком вертикального перемещения и с источником питания, подключенным ко всем блокам устройства, блок горизонтального перемещения связан с блоком вертикального перемещения.
