1
(21) 4332142/24-07 (22) 23.11.87 (46) 07.01.90. Бкш. № 1
(71)Горькоеский политехнический институт
(72)А.И. Зайцев, Р.Н.Шакиров и В.А.Тихомиров
(53)621 .313.3.07(088.8)
(56)Авторское свидетельство СССР IP 656175, кл. Н 02 Р 5/34, 1979.
Авторское свидетельство СССР № 1026272, кл. Н 02 Р 5/34, Н 02 Р 7/42, 1981.
(54)ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА
(57)Изобретение относится к электротехнике, а именно к частотно-управл я- емым электроприводам переменного то ка, по строенным на основе асинхронных двигателей с коротко замкнутым ротором, и может быть использовано в системах с высокими требованиям по качеству регулирования частоты вращения, в частности в приводах главного движе-
ния станков с числовым программным управлением. Целью изобретения является повышение точности регулирования частоты вращения ротора двигателя. Указанная цель достигается тем, что в электроприводе с асинхронным двигателем 1, статорные обмотки которого подключены к выходам преобразователя 2 частоты, блоком 3 датчиков фазных токов, датчиком 4 частоты вращения, блоком 14 фазных регуляторов тока,вычислитель скольжения 6, подключенный входами к выходу аналого- цифрового преобразователя 5 и к выходу блока 11 вычисления активной составляющей вектора тока статора, реализует алгоритм работы, обеспечивающий вычисление скольжения не только по сигналу активной составляющей вектора тока статора, но и по ошибке между измеренной частотой вращения и ее эталонным значением на каждом интервале дискретности. 2 ил.
i
(Л

| название | год | авторы | номер документа |
|---|---|---|---|
| Частотноуправляемый электропривод переменного тока | 1982 |
|
SU1086536A1 |
| Электропривод переменного тока | 1981 |
|
SU1026272A1 |
| Частотноуправляемый электропривод переменного тока | 1982 |
|
SU1086535A1 |
| СПОСОБ ОЦЕНКИ РЕГУЛИРУЕМЫХ СИГНАЛОВ ТРЕХФАЗНОГО ДВИГАТЕЛЯ С КОРОТКОЗАМКНУТЫМ РОТОРОМ | 1998 |
|
RU2158472C2 |
| СПОСОБ ОЦЕНКИ РЕГУЛИРУЕМЫХ СИГНАЛОВ ТРЕХФАЗНОГО ДВИГАТЕЛЯ С КОРОТКОЗАМКНУТЫМ РОТОРОМ | 1998 |
|
RU2158471C2 |
| Электропривод переменного тока | 1984 |
|
SU1464276A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ ВРАЩЕНИЯ ТРЕХФАЗНОЙ МАШИНЫ | 2013 |
|
RU2557071C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЭДС РОТОРА СИНХРОННЫХ И ТОКА РОТОРА АСИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ (ЕГО ВАРИАНТЫ) | 2001 |
|
RU2207578C2 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2020724C1 |
Изобретение относится к электротехнике, а именно к частотно-управляемым электроприводам переменного тока, построенным на основе асинхронных двигателей с коротко - замкнутым ротором, и может быть использовано в системах с высокими требованиями по кочеству регулирования частоты вращения, в частности в приводах главного движения станков с числовым программным управлением. Целью изобретения является повышение точности регулирования частоты вращения ротора двигателя. Указанная цель достигается тем, что в электроприводе с асинхронным двигателем 1, статорные обмотки которого подключены к выходам преобразователя 2 частоты, блоком 3 датчиков фазных токов, датчиком 4 частоты вращения, блоком 14 фазных регуляторов тока, вычислитель скольжения 6, подключенный входами к выходу аналого-цифрового преобразователя 5 и к выходу блока 11 вычисления активной составляющей вектора тока статора, реализует алгоритм работы, обеспечивающий вычисление скольжения не только по сигналу активной составляющей вектора тока статора, но и по ошибке между измеренной частотой вращения и ее эталонным значением на каждом интервале дискретности. 2 ил.
софел
со
4 1
СО
ел
Изобретение относится к электротехнике, а именно к частотно-управляемым электроприводам переменного тока, построенным на основе асинхронных двигателей с короткозамкнутым ротором, и может быть использовано в системах с высокими требованиями по качеству регулирования частоты вращения, в частности в приводах главного движения станков с числовым программным управлением.
Целью изобретения является повышение точности регулирования частоты вращения ротора двигателя.
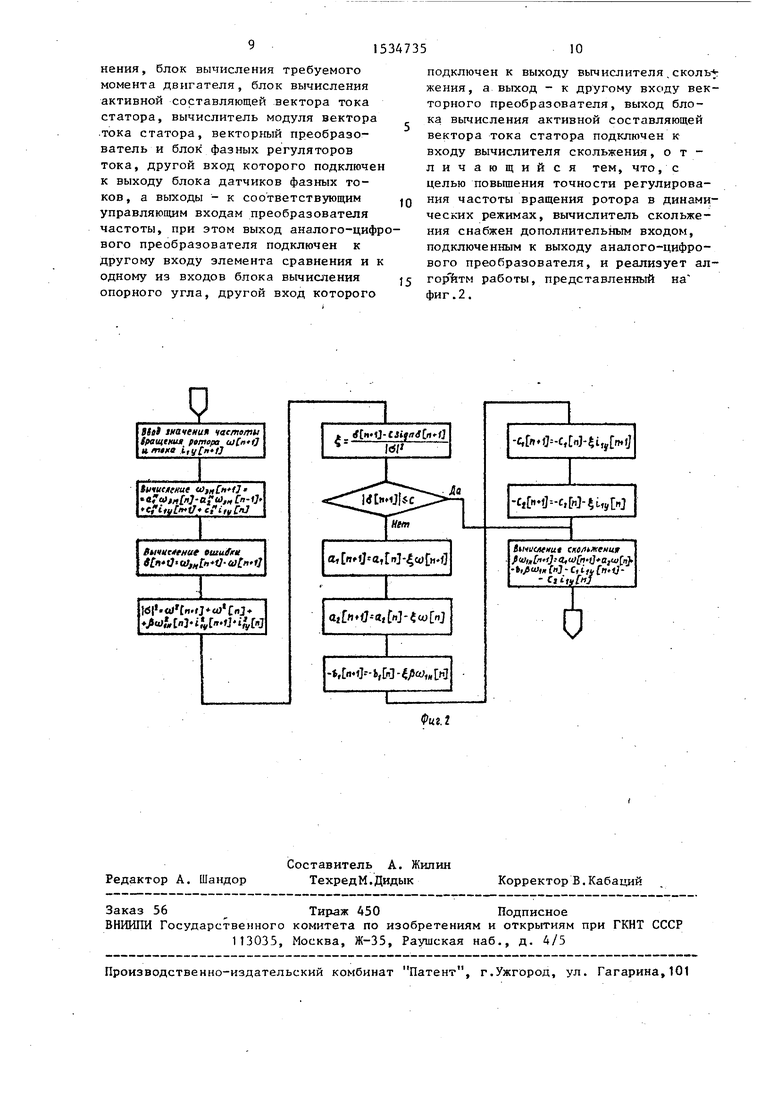
На фиг. 1 представлена функциональная схема электропривода переменного тока , на фиг. 2 - алгоритм работы вычислителя скольжения.
Электропривод переменного тока содержит асинхронный двигатель 1 с короткозамкнутым ротором, статорные обмотки которого подключены к выхо- дам преобразователя 2 частоты, блок 3 датчиков фазных токов, датчик 4 частоты вращения, установленный на валу асинхронного двигателя 1, аналого-цифровой преобразователь 5,подключенный к выходу датчика 4, вычислитель 6 скольжения, блок 7 вычисления опорного угла с двумя входами и последовательно соединенные задатчик 8 частоты вращения, элемент 9 сравнения, блок 10 вычисления требуемого момента двигателя, блок 11 вычисления активной составляющей вектора TOKI статора-, вычислитель 12 модуля вектора тока статора, векторный преобразователь 13 и блок 14 фазных репредставленный на фиг. 2, по которо величина скольжения ЙС04Н на (л+)такте расчета определяется дискретным выражением
a,G)n+f + ага n - - - , - c2i,y n
10
параметры а{, аг, -Ь, -с, , -с2 подстраиваются в процессе работы элект привода таким образом, чтобы ошибка между частотой вращения рото J5 ра и ее эталонным значением, задава емым реакцией эталонной модели по выражению
20
25
30
- и-1
+ + ,
была не больше допустимого значения Подстройка параметров определяет выражениями:
а,п+1 а, п , ) -b,n+l -b,n ,
-c,n+l -c,n - i,y n+l - n
где
35
У
Bfb- il - с sign 5 n+1
l( +( +
Ъ
ntl + i n.
гуляторов тока, другой вход которого .Q Постоянные коэффициенты а, а, с,
ПОДКЛЮЧеН К ВЫХОДУ блока 3 ДаТЧИКОВ f ътяпг -и-иг,й мппопм 7 - гп пппстгтк-я
сЈ эталонной модели 2-го порядка определяются желаемыми динамическим характеристиками электропривода пер менного тока.
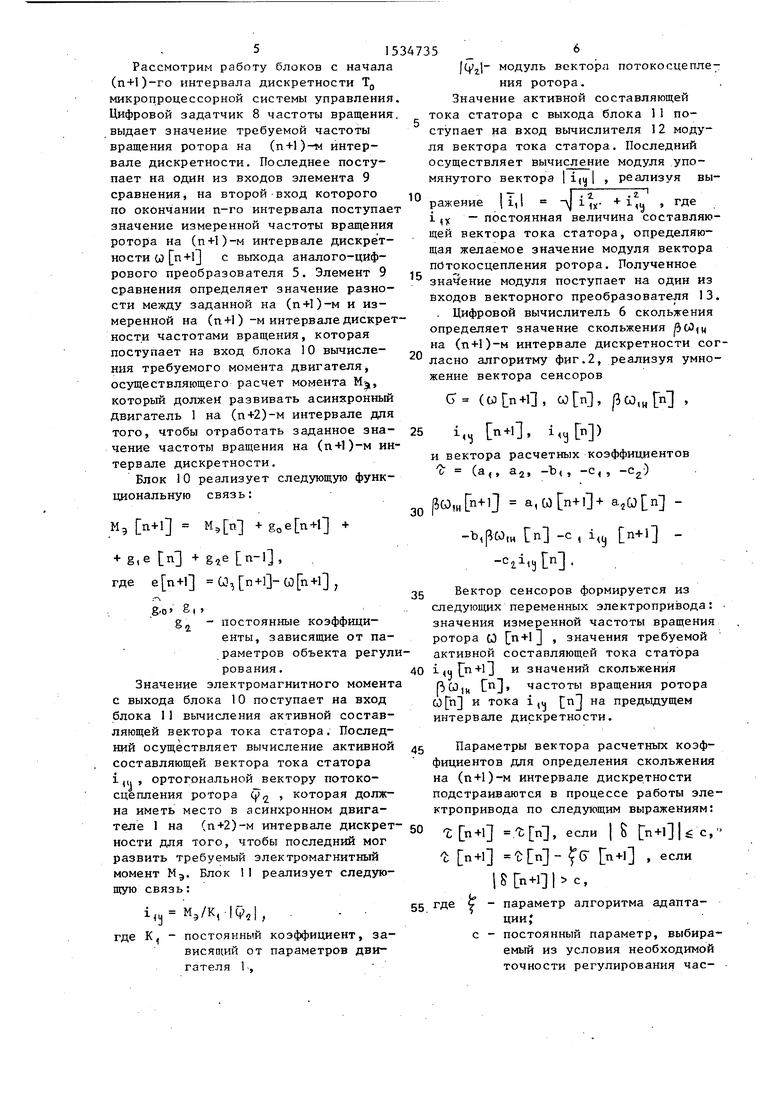
фазных токов, а выходы - к соответствующим управляющим входам преобразователя 2 частоты. При этом выход аналого-цифрового преобразователя 5 подключен к другому входу элемента 9 сравнения и к одному из входов блока 7 вычисления опорного угла, другой вход которого подключен к выходу вычислителя 6 скольжения, а выход - к другому входу векторного преобразователя 13. Выход блока 11 вычисления активной составляющей вектора тока статора подключен к входу вычислителя 6 скольжения. Вычислитель 6 скольжения снабжен дополнительным входом, подключенным к выходу аналого-цифровото преобразователя 5, и реализует алгоритм работы,
представленный на фиг. 2, по которому величина скольжения ЙС04Н на (л+)м такте расчета определяется дискретным выражением
a,G)n+f + ага n - - - , - c2i,y
параметры а{, аг, -Ь, -с, , -с2 подстраиваются в процессе работы электропривода таким образом, чтобы ошибка между частотой вращения рото- ра и ее эталонным значением, задаваемым реакцией эталонной модели по выражению
-
+ + ,
была не больше допустимого значения с. Подстройка параметров определяется выражениями:
а,п+1 а, п , ) -b,n+l -b,n ,
-c,n+l -c,n - i,y - n
где
У
Bfb- il - с sign 5 n+1
l( +( +
Ъ
ntl + i n.
Постоянные коэффициенты а, а, с,
f ътяпг -и-иг,й мппопм 7 - гп пппстгтк-я
сЈ эталонной модели 2-го порядка определяются желаемыми динамическими характеристиками электропривода переменного тока.
Цифровые блоки системы управления электропривода выполнены на базе микропроцессорных БИС серии К1801, К580.
Электропривод переменного тока работает следующим образом.
Функционально система управления электроприводом выполнена двухконтур- ной: внешний - цифровой контур регулирования частоты вращения, выполняющий также функции формирования задающих токов статора, реализован программно на базе микропроцессорных БИС, внутренний - контур регулирования фазных токов статора, реализован аппаратно на дискретных элементах.
515
Рассмотрим работу блоков с начала (п+1)-го интервала дискретности Т0 микропроцессорной системы управления Цифровой задатчик 8 частоты вращения выдает значение требуемой частоты вращения ротора на (п+1)-м интервале дискретности. Последнее поступает на один из входов элемента 9 сравнения, на второй вход которого по окончании n-го интервала поступае значение измеренной частоты вращения ротора на (п+1)-м интервале дискретности СО n+l с выхода аналого-цифрового преобразователя 5. Элемент 9 сравнения определяет значение разности между заданной на (п+1)-м и измеренной на (п+1) -м интервале дискретности частотами вращения, которая поступает на вход блока 10 вычисления требуемого момента двигателя, осуществляющего расчет момента М, который должен развивать асинхронный двигатель 1 на (п+2)-м интервале для того, чтобы отработать заданное зна- чение частоты вращения на (п+1)-м интервале дискретности.
Блок 10 реализует следующую функциональную связь:
Мэ п+1 M,n + +
+ g,e n + g,e n-l,
где ,
Л
8-0 Ј i g,
30
3CO, a,( + - -Ъ,ри,„ n -c , i,y n+l - 3 H
-сг1,
35 Вектор сенсоров формируется из следующих переменных электропривода значения измеренной частоты вращени ротора (О Гп+ значения требуемой активной составляющей тока статора
- постоянные коэффициенты, зависящие от параметров объекта регулирования.40 i4i)Un+0 и значений скольжения Значение электромагнитного момента ВСО,„ Сп частоты вращения ротора с выхода блока 10 поступает на вход и тока i Ha предыдущем блока 11 вычисления активной составляющей вектора тока статора. Последний осуществляет вычисление активной составляющей вектора тока статора i Ч ортогональной вектору потоко- сцепления ротора (р , которая должна иметь место в асинхронном двигателе 1 на (п+2)-м интервале дискретности для того, чтобы последний мог развить требуемый электромагнитный
интервале дискретности.
45 Параметры вектора расчетных коэффициентов для определения скольжения на (п+1)-м интервале дискретности подстраиваются в процессе работы эле ктропривода по следующим выражениям
50 1 n-И , если | Б Ъ n+l Ј(Г n+l , если
момент Мэ. Блок 11 реализует следующую связь:
Ц м9/к, |фв|,
где К, - постоянный коэффициент, зависящий от параметров двигателя 1 ,
ftyil м°ДУЛь вектора потокосцепления ротора.
Значение активной составляющей тока статора с выхода блока 11 поступает на вход вычислителя 12 модуля вектора тока статора. Последний осуществляет вычисление модуля упомянутого вектора I i(y I , реализуя выражение
(X
л|ТТ
+ , где - постоянная величина составляю
щей вектора тока статора, определяющая желаемое значение модуля вектора пОтокосцепления ротора. Полученное значение модуля поступает на один из входов векторного преобразователя 13. Цифровой вычислитель 6 скольжения определяет значение скольжения оОщ на (п+1)-м интервале дискретности сог- ласно алгоритму фиг.2, реализуя умножение вектора сенсоров
СГ (, , |ЗеО, , Ц n+l, )
и вектора расчетных коэффициентов (а(, а2, -Ъ(, -с,, -сг)
t
3CO, a,( + - -Ъ,ри,„ n -c , i,y n+l - 3 H
-сг1,
Вектор сенсоров формируется из следующих переменных электропривода: значения измеренной частоты вращения ротора (О Гп+ значения требуемой активной составляющей тока статора
i4i)Un+0 и значений скольжения ВСО,„ Сп частоты вращения ротора и тока i Ha предыдущем
i4i)Un+0 и значений скольжения ВСО,„ Сп частоты вращения ротора и тока i Ha предыдущем
интервале дискретности.
Параметры вектора расчетных коэффициентов для определения скольжения на (п+1)-м интервале дискретности подстраиваются в процессе работы электропривода по следующим выражениям:
1 n-И , если | Б Ъ n+l Ј(Г n+l , если
с
где 9 - параметр алгоритма адаптации;
с - постоянный параметр, выбираемый из условия необходимой точности регулирования час7153
тоты вращения и величины возмущающих воздействийJ S|n+l СО n+l Р иГп+П ошибка между частотой вра
Эгг - -
щения ротора и ее эталонным значением.
Следовательно, подстройка параметров определяется выражениями
a, n+l a,, , -Ъ,п+1 -Ъ,п ,
-с, п+1 -с,,и п+1,
с-1 Гп+11 -с2..
Вычисление параметра алгоритма адаптации осуществляется по следуго- выражению:
- Cti+1 J - csign 7
где | + +рйЦп + + ijj n+l + ij,j n .
Эталонное значение частоты вращения ротора двигателя задается реакцией эталонной модели дискретным уравнением
зм п+11 -аГиэм М - а2«э« п-
+ ,i, n+l + .
Постоянные коэффициенты а , a, c, c эталонной модели определяются желаемыми динамическими характеристиками электропривода.
В свою очередь, значения измерен- ной частоты вращения ротора на п+1)интервале дискретности Q n+l с вы хода аналого-цифрового преобразователя 5 и скольжения 3 СО in с выхода цифрового вычислителя 6 скольжения поступают на входы блока 7 вычисления опорного угла, осуществляющего вычисление требуемого углового положения вектора тока статора на (п+2)-м интервале дискретности, используя выражение
9 n +( +
+ }5CO, ),
Запоминают его, после чего полученное -значение поступает на один из входов векторного преобразователя 13. Поспедний вычисляет значения
5
5
0
30
4Q ,
50
55
данных фазных токов статора i,a .
t . --, t . L- J j
Ln+lJ 1%с 1П + Ч которые поступают в цепи заданий блока 14 фазных регуляторов.
Определение функций корня квадратного в вычислителе 12 и синусов в векторном преобразователе 13 осуществляется табличным способом,т.е. значения функций предварительно вычисляются в необходимом диапазоне и записываются в постоянные запоминающие устройства.
В результате этого на (п+1)-м интервале дискретности на статор асинхронного двигателя 1 подаются такие напряжения с выхода преобразователя 2 частоты, которые позволяют отработать заданные токи статора и частоту вращения ротора.
Работа электропривода на последующих интервалах дискретности осуществляется аналогично описанной.
Таким образом, дополнительное подключение вычислителя скольжения к выходу аналого-цифрового преобразователя и реализация в нем алгоритма работы, представленного на фиг. 2, обеспечивает вычисление требуемого скольжения не только по сигналу активной составляющей вектора тока статора, но и по ошибке между измеренной частотой вращения и ее эталонным значением на каждом интервале дискретности, благодаря чему осуществляется адаптация скольжения к изменяющимся параметрам электропривода и повышается точность регулирования частоты вращения ротора асинхронного двигателя в динамических режимах работы в сравнении с известным решением.
Формула изобретения
Электропривод переменного тока, содержащий асинхронный двигатель с короткозамкнутым ротором, статорные обмотки которого подключены к выходам преобразователя частоты, блок датчиков фазных токов, включенный на выходе преобразователя частоты, датчик частоты вращения, установленный на валу асинхронного двигателя, аналого-цифровой преобразователь, подключенный к выходу датчика, вычислитель скольжения, блок вычисления опорного угла с двумя входами и последовательно соединенные задат- чик частоты вращения, элемент срав915
нения, блок вычисления требуемого момента двигателя, блок вычисления активной составляющей вектора тока статора, вычислитель модуля вектора тока статора, векторный преобразователь и блок фазных регуляторов тока, другой вход которого подключен к выходу блока датчиков фазных токов , а выходы - к соответствующим управляющим входам преобразователя частоты, при этом выход аналого-цифрвого преобразователя подключен к другому входу элемента сравнения и к одному из входов блока вычисления опорного угла, другой вход которого
r
0
10
подключен к выходу вычислителя , сколь - жения, а выход - к другому входу векторного преобразователя, выход блока вычисления активной составляющей вектора тока статора подключен к входу вычислителя скольжения, о т - личающийся тем, что, с целью повышения точности регулирования частоты вращения ротора в динамических режимах, вычислитель скольжения снабжен дополнительным входом, подключенным к выходу аналого-цифрового преобразователя, и реализует ал- гор йтм работы, представленный на фиг. 2.
