Р1зобретение относится к области нелинейных систем автоматического управления.
Известны непрерывные приводы, содержащие усилитель, силовой механизм с односторонним ограничением, соединенный через блок обратной связи с усилителем, модель усилителя, вход которой соединен со входом усилителя, а выход - со входом модели силового механизма без ограничения, соедине; ной через модель блока обратной связи со входом модели усилителя.
Недостатком известных устройств является то, что при больших сигналах управления из-за действия ограничения может происходить срезание части периодического сигнала, обусловленного свободным движением систем управления, в которые они включены. В результате этого ухудшаются динамические свойства приводов и, как следствие, нарушается режим работы систем управления.
Предложенный непрерывный привод отличается тем, что он содержит последовательно соединенные фиксатор ограничения и блок временной коммутации. Вход фиксатора ограничения соединен с выходом привода через нормально замкнутый контакт блока временной коммутации, усилитель соединен с силовым механизмом, подключенным через нормально разомкнутый контакт блока коммутации к модели усилителя.
Это позволяет улучшить динамические характеристики прявода.
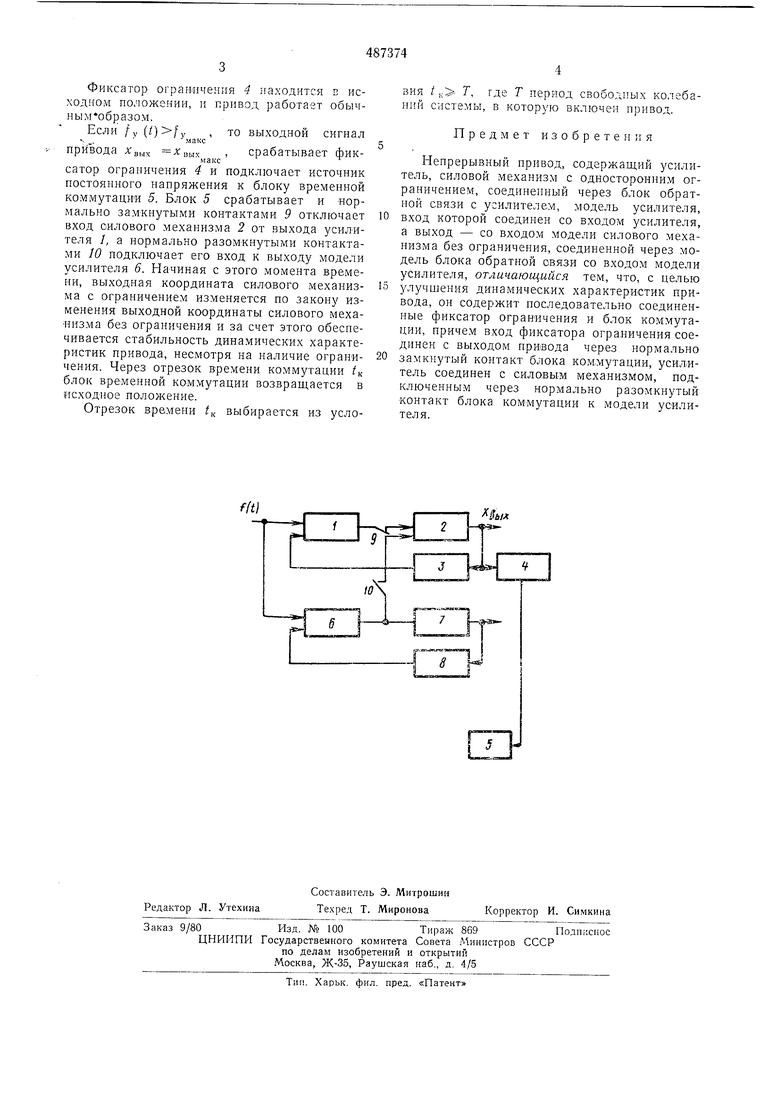
На чертеже приведена блок-схема предложенного непрерывного привода.
Привод содержит: усилитель /; силовой механизм с односторонним ограничением 2; блок обратной связи 3: фиксатор ограничения 4; блок временной коммутации 5; модель усилителя 6; модель силового механизма без ограничения 7 и модель блока обратной связи 5.
Предлагаемый иривод работает следующим образом.
Предположим, что на вход усилителя / привода подается сигнал управления
/у (О /, (/) (г)
где /2 (/) - гармоническая составляющая сигнала управлення, обусловленная свободным Дзи/кением системы, в которую В),1ючен привод;
(01 постоянная (медленно меняющаяся) составляющая сигнала управления. Если (/)/v(где f,.-вели макс акс
чина сигнала на входе привода, соответствующая насыщению его выходной координаты), то насыщения не происходнт, т. е.
Б ,- - П.-
Фиксатор огран.ичеиня 4 находится Е исходном положении, и привод работает обычным образом.
Если /V ( 1 то выходной сигнал
макс
Привода ,,,,. :Свых , срабатывает фик макс
сатор ограничения 4 и подключает источник постоянного напряжения к блоку временной коммутации 5. Блок 5 срабатывает и нормально замкнутыми контактами 9 отключает вход силового механизма 2 от выхода усилителя /, а нормально разомкнутыми контактами 10 подключает его вход к выходу модели усилителя 6. Начиная с этого момента времени, выходная координата силозого механизма с ограничением изменяется по закону изменения выходной координаты силового механизма без ограничения и за счет этого обеснечивается стабильность динамических характеристик привода, несмотря на наличие ограничения. Через отрезок времени коммутации /к блок временной коммутации возвращается в исходное положение.
Отрезок времени t выбирается из услоВИЯ гк Т, где Т перрюд свободных колебаний системы, в которую включен привод.
Предмет изобретения
Непрерывный привод, содержащий усилитель, силовой механизм с односторонним ограничением, соединенный через блок обратной связи с усилителем, модель усилителя, вход которой соединен со входом усилителя, а выход - со входом модели силового механизма без ограничения, соединенной через модель блока обратной связи со входом модели усилителя, отличающийся тем, что, с целью улучшения динамических характеристик привода, он содержит последовательно соединенные фиксатор ограничения и блок коммутации, причем вход фиксатора ограничения соединен с выходом привода через нормально замкнутый контакт блока коммутации, усилитель соединен с силовым механизмом, подключенным через нормально разомкнутый контакт блока коммутации к модели усилителя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Непрерывный привод | 1976 |
|
SU643827A2 |
| Непрерывный привод | 1982 |
|
SU1137441A2 |
| Непрерывный привод | 1989 |
|
SU1734071A2 |
| Непрерывный привод | 1981 |
|
SU964572A2 |
| ИМИТАТОР СИСТЕМЫ СОПРОВОЖДЕНИЯ | 1978 |
|
SU1840907A1 |
| Устройство для моделирования вентильного электродвигателя | 1988 |
|
SU1596357A1 |
| Адаптивный регулятор состава смеси двигателя с принудительным зажиганием | 1974 |
|
SU503217A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ МЕХАНИЗМОМ ТРИММЕРНОГО ЭФФЕКТА МАНЕВРЕННОГО САМОЛЕТА | 2018 |
|
RU2719610C1 |
| Привод | 1974 |
|
SU732800A1 |
| Устройство для определения параметров динамического звена второго порядка | 1984 |
|
SU1231489A1 |
ых
