1
Изобретение относигся « област сельского хозяйСТ1ва ill 1юпользуется для создания си-сте--м а:втоматическ:аго наюравлендя движения самоходных , натример, при сельскохозяйствешюм ;прои33одсТВе, когда требуется высокая долтоэременная стабильность ноддержаиия траектории движения.
Известен способ О-риентации самоходных .машин в индукционном поле, состоящий в том, что преобразуют величину напряженности индукционного столя -3 соответствуюнюе 1 аиряжент1е, сравнивают его с этало-ном для дайной эквиди-ста-нтной линии и 1выделяк т сигнал ошибки каж разность этих двух начфяжений.
Иедостатком известного сласоба является недосгаточная .стабильность, которая является результатом изменения величины тока токонесущих ироводах, вел гчины эталонного }ишряже ния, либо величины коэффициента ио:редач41 :111чаукцион.нсг.о машитоирие.мннка.
С ислыо .повышения то чности ориентаиии иуте.м устра иения влияния измеиени я загуха1Ч1Я иилукии о ннаго ноля по пpeд..ilгaeмo y способу ориентаишо сам оходиых ироиз к().дят по мулеиой зк13И ДИСтант-н.оП линн и ядукщюиного ноля, которое создается одноналраиленны ми токами, и Выделяют сигнал о щибки ка;к ра.31иость сюсле сравнения его с эталоПИым иатряжением.
2
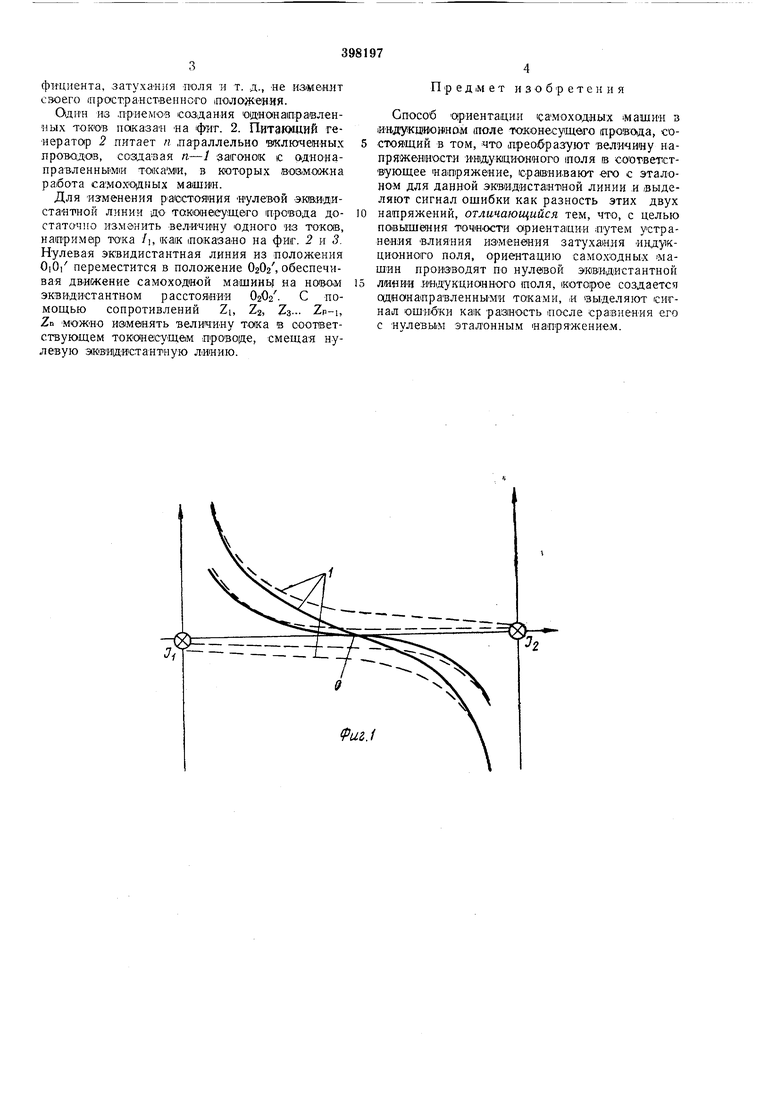
В iipocTpaiicTBe, ограниченном .дв)мя токонесущими ироводал и. создается н ндукционное ио.пе от каждого из афоводов. При обтека«и; этих иров одов одним TOiKOM на.п;ряженность ноля 3 каждой из точек пространства я.вляегся сум:мой модулей наиряженностей, создавае.мых каждым из и.роводов. Ири .протекаиии однонаиравлениых токов (фиг. 1) общее и}1дужииои.ное лоле ;; пространстве .между ироводникаМИ является рэзНостыо модулей наиряженностей, создаваемых каждым из провадниКОБ, ;, следивательно, будет линия эк.в:гдистакт;1ая токонесущему агроваду, на которой суммарная ианряжен.ность будет
нулю.
На ф;гг. 1 .1оказа п характер нанряжен-ности .ч идукиионного поля В1нутрн .двух .проводов с однонаправленными . на фиг. 2 - раскладка токонесущих нроводов для создания п
загонок; на фиг. 3 - смеил,ение нулевой эквидистантной линли, «anpiLMep, за счет из.менения тока.
Вертикальный разрез полей, создаваемых тока.мп /1 и /2, а также суммарного ноля, показан на фиг. 1, позиция /.
Иулевая .эюви дистантная лрн ад.ииаковом изменении величины токов /i И /о, вызванных, например, нестабильностью питающего генератора, негодным иаменением Коэффтгциента, затухэния поля и т. д., Не иэме.н.ит сзюего (просTpaffcieeиного лоложения.
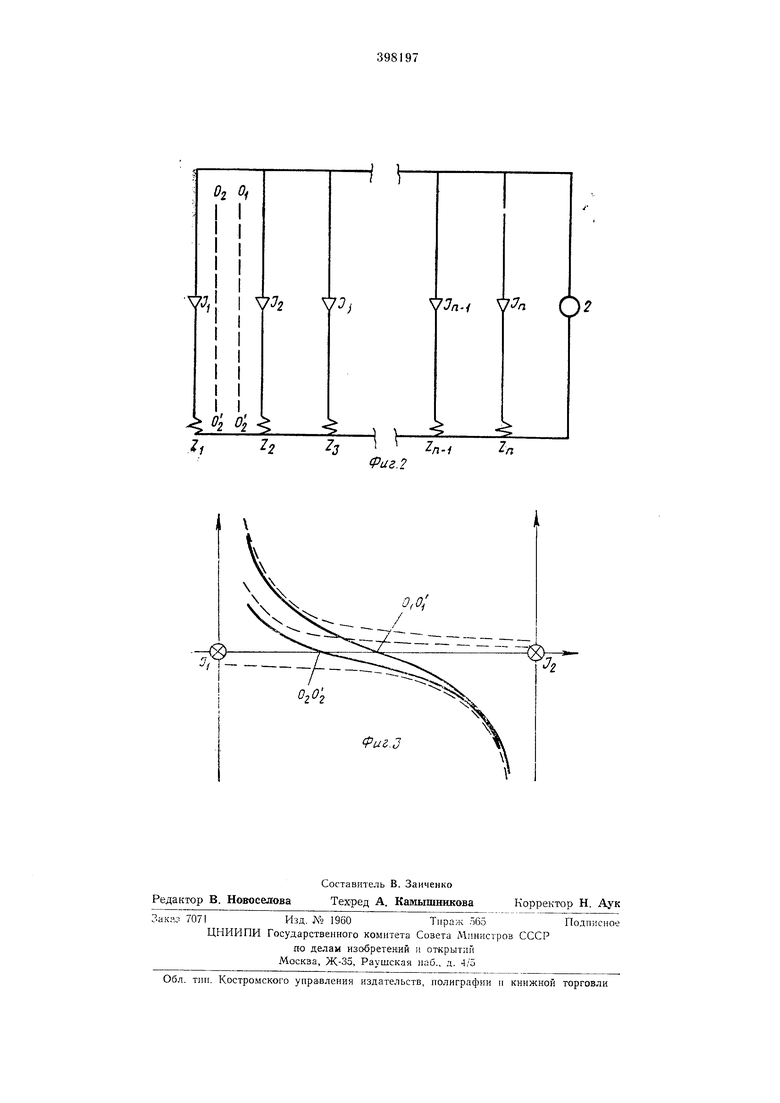
Один из .п-риемОЗ создания юанонаиравленных токюв паказаН «а фтт. 2. Питаюлций генератар 2 питает п .параллельно включенных проводов, соэдавая п-1 загонок с однонаправленньш1И токазди, в которых воаМОЖ-на работа са мохщных машин.
Для -измеиения расстояиия нулевой эювидястантной линии до токонесущего провода достаточно изменить величину одного из токов, например тока /ь «aiK доказано на фиг. 2 и 3. Нулевая эквидистантная линия из положения OiO/ переместится в положение 6202, обеспечивая движение самоходной машинь; на ново.м эквидистантном расстоядии 0202. С помощью сопротивлений Zi, Zz, Zs- ZP-I, Zn можно иэменять величину тожа в соответствующем токонесущем прово)де, смещая нулевую э(КВИ|Д И1Стант1ную лданию.
П р е д iM е т изобретения
Способ ориентации 1самоходных машии в 1ин,ду..м 1поле токонесущего (Провода, состоящий Б том, что (Преабразуют величину напряженности ИВдукщионного толя IB соответствующее 1настряжение, срашяивают его с эталоно-м для данной эквидистантной линии и выделяют сигнал ошибки как разность этих двух
напряжений, отличающийся тем, что, с целью по1ВЫЩ1ения точности ориентации путем устранения влияния изменения затухания инд жционного поля, ориентацию само.тодных мащин производят по нулотой эквидистантной
лияИН индукционного 1ПОЛЯ, которое создается однанашравленными токами, и выделяют сигнал ошибки как разность после сравнения его с нулевым эталонным напряжением.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ ориентации самоходных машин в переменном электромагнитном поле токонесущих проводов | 1982 |
|
SU1017180A1 |
| Способ ориентации самоходных машин в переменном электромагнитном поле токонесущих проводов | 1983 |
|
SU1139378A1 |
| Способ ориентации самоходных машин в индукционном поле токонесущего провода | 1978 |
|
SU695600A2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КУРСОВОГО УГЛА САМОХОДНОЙ МАШИНЫ1^СВСОЮЗНАЯ- '••-• ---"^'i^m | 1972 |
|
SU324969A1 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ДЛЯ СИСТЕМ | 1971 |
|
SU312560A1 |
| Устройство ориентации для систем группового автоматического вождения машинно-тракторных агрегатов | 1979 |
|
SU1376963A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО НАПРАВЛЕНИЯ ДВИЖЕНИЯ САМОХОДНОЙ КОЛЕСНОЙ МАШИНЫ | 1969 |
|
SU249110A1 |
| Способ ориентации самоходной машины в переменном электромагнитном поле токонесущих проводов | 1983 |
|
SU1087965A1 |
| Способ ориентации самоходной машины в индукционном поле токонесущего проводника | 1984 |
|
SU1285148A1 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ДЛЯ СИСТЕМ | 1973 |
|
SU385548A1 |
--ф-Г Т a2.f
Zj i
л Фиг.2
h-
