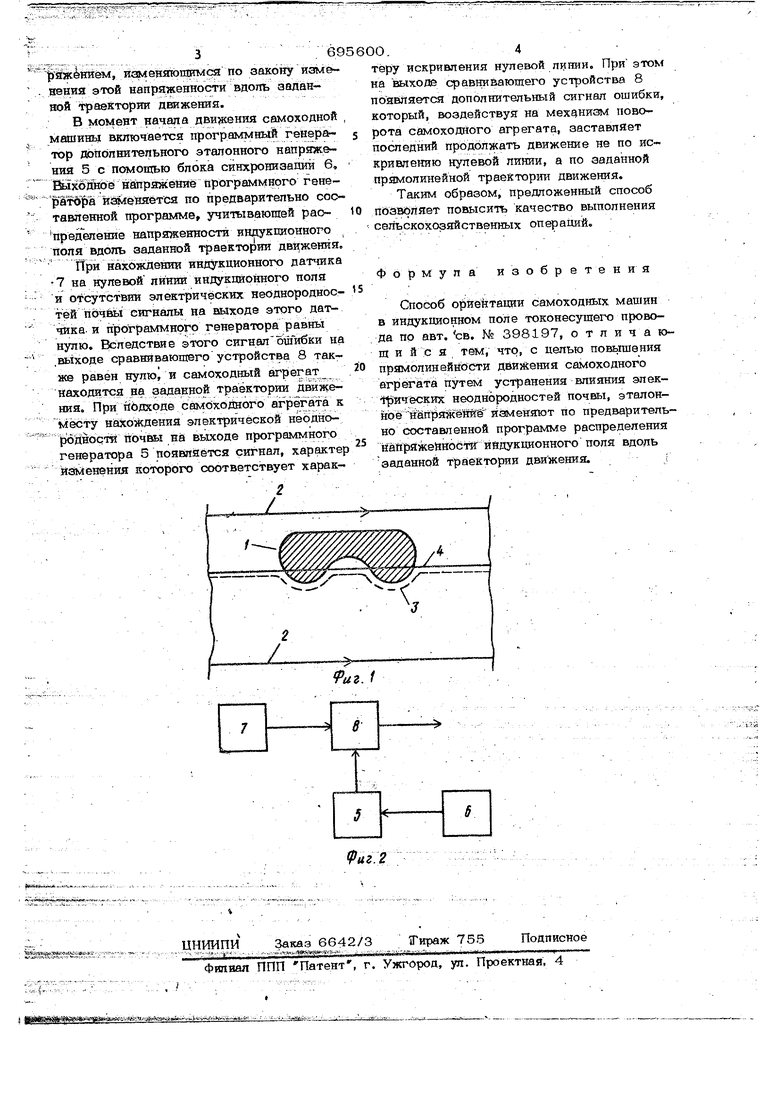
. . , I , , . Изобретение относится к сельскому хо зяйству и может быть использовано для создания систем автоматического напра& лен1ая движения самоходных машин. По основному авт. св. NO 398197 из вестен способ ориентации самоходных ма П1ИН в индукционном поле токонесущего провода, заключающийся в том, что орие тацию самоходных мащин производят по нулевой эквидистантной линии индукционного поля, создаваемого однонаправленными токами, и вьгдепяют сигнал ошибки как разность после сравнения сигнала де ствительного положения с кулевым эталонным напряжением. Недостатком известного способа является влияние электрических неоднородностей почвы на т ямолинейность движения самоходного агрегата, обславливаюшее искривление нулевой линии индукцион ного поля в местах нахождения этих неоднородностей. Целью изобретения является повышение прямолинейности движения самоходного агрегата путем устранения влияния электрических неоднородностей почвы. Это достигается т«л, что эталонное напряжение иаменшот по щэедвгрительно составленной программе распределения напряженности индукционного поля вдоль заданной траектории движешя. На фиг. I схетлатично показаны искривление нулевой линии и заданная траектория движешя самоходного агрегата; на фиг. 2 - блок-схема устройства. Электромагнитное поле электрической неоднаородности 1, возбужденное первичным электромагнитшлм полем токонесущих проводов 2, приводит к искривлению нулевой линии 3 индукционного пОля. При этом напряженность индукционного поля вдоль заданной траекагории движения 4 в месте нахождения неоднородности почвы будет отличной от нуля, и характер ее изменения будет соотвётствова:ть характеру искривления нулевой линии. Влияние этой дополнитеппьной напряженности компенсируется дополнительным эталонным нап69,ат4№ём, йемейяпопшмся по закону изм&не аия этой напряткенности вдопъ заданной траектории движения. В момент начала движения самоходной машивд включается нрограммный генера тор дополнительного эталонного напряжения 5 с помонгью блока синхронизашш 6, ШхоШзйё напряжение программного генерйтора й;э леняётся по предварительно составленной программе, учитывающей раопределение напряженности индукционного поля вдоль заданной траектории движения. При нахождении индукционного датчика 7 на нулевой линий индукционного поля и отсутствии электрических неоднородноетей почйа сигналы на выходе этого да-гчика. и про граммнргр генератора равнь нулю. Вследствие этого сигналошибки на ,вь1коде сравнивающего устройства 8 также равен нулю) и самоходный агрегат Находится на заданной траектории движения. При йбдходе самоходного агрегата к месту нахождения электрической неодно рдйност почвы на выходе программного генератора 5 появляется сигнал, характер йййенения которого соответствует харак0теру искривления нулевой nijНИИ. Приэтом а выходе сравнивающего устройства 8 оявляется допЬппительный сигнал ошибки, который, воздействуя на механизм поворота самоходного агрегата, заставляет последний продолжать движение не по искривлению нулевой линии, а по заданной прямолинейной траектории движения. Таким образом, предложенный способ пбзвбляет повысить качество выполнения сельскохозяйственных операций. изобретения Формул а Способ о)йейта1ши самоходных машин в индукпионном поле токонесущего провода по авт. св. № 398197, отличающ и и ;с я тем, что, с целью повьхшения прямолинейности дйигйения самоходного агрегата путем устранения влияния электрических неоднородностей почвы, эталонjiioe HartpsIifKeMff ййменяют по предварительно составленной программе распределения напрйисеНной№ индукционного поля вдоль заданной трае ктории движения.Г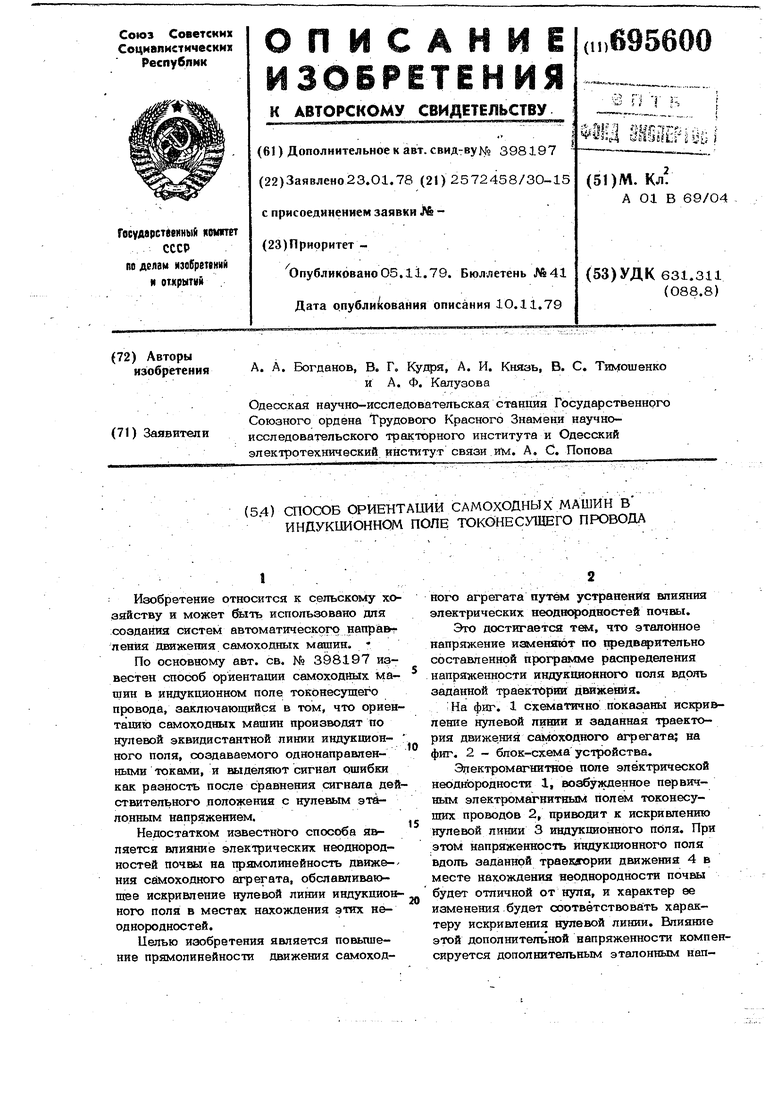
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ ориентации самоходных машин в переменном электромагнитном поле токонесущих проводов | 1982 |
|
SU1017180A1 |
| СПОСОБ ОРИЕНТАЦИИ САМОХОДНЫХ МАШИН В ИНДУКЦИОННОМ ПОЛЕ ТОКОНЕСУЩЕГО ПРОВОДLlifl;| '?M?^^^^3T^|j ;f"-h,4 O.JL--IX.S иШ | 1973 |
|
SU398197A1 |
| Способ ориентации самоходных машин в переменном электромагнитном поле токонесущих проводов | 1983 |
|
SU1139378A1 |
| Устройство для автоматического управления движением самоходного средства | 1981 |
|
SU976875A1 |
| Способ местоопределения тракторного агрегата и устройство для осуществления | 2015 |
|
RU2607337C1 |
| Чувствительный элемент системы автоматического управления вождением мобильного агрегата | 1977 |
|
SU791282A1 |
| Система управления движением самоходного агрегата при полигонных испытаниях | 1980 |
|
SU888080A1 |
| Устройство для автоматического направления движения самоходных агрегатов | 1977 |
|
SU615880A1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ МОБИЛЬНОГО АГРЕГАТА ПРИ ВЫПОЛНЕНИИ АГРОПРОЦЕССОВ | 2010 |
|
RU2430499C1 |
| Способ ориентации самоходной машины в переменном электромагнитном поле токонесущих проводов | 1983 |
|
SU1087965A1 |
