Изобретение относится « устройствам для э.коплуатационных испытаний самоходных машин.
Известные устройства содержат токонесущий провод, индукционный датчик с опорным усилителем и фазовый детектор.
В предлагаемом устройстве для измерения курсового угла самоходной машины на любых расстояниях от токонесущего провода опор-ный усилитель ох1вачеи системой автоматичеокого регулирования усиления, управляющим сигналом которой синхронно изменяется коэффициент усилеиия сигнального усилителя, а продольная ось датчика совмещена с направлением движения машины.
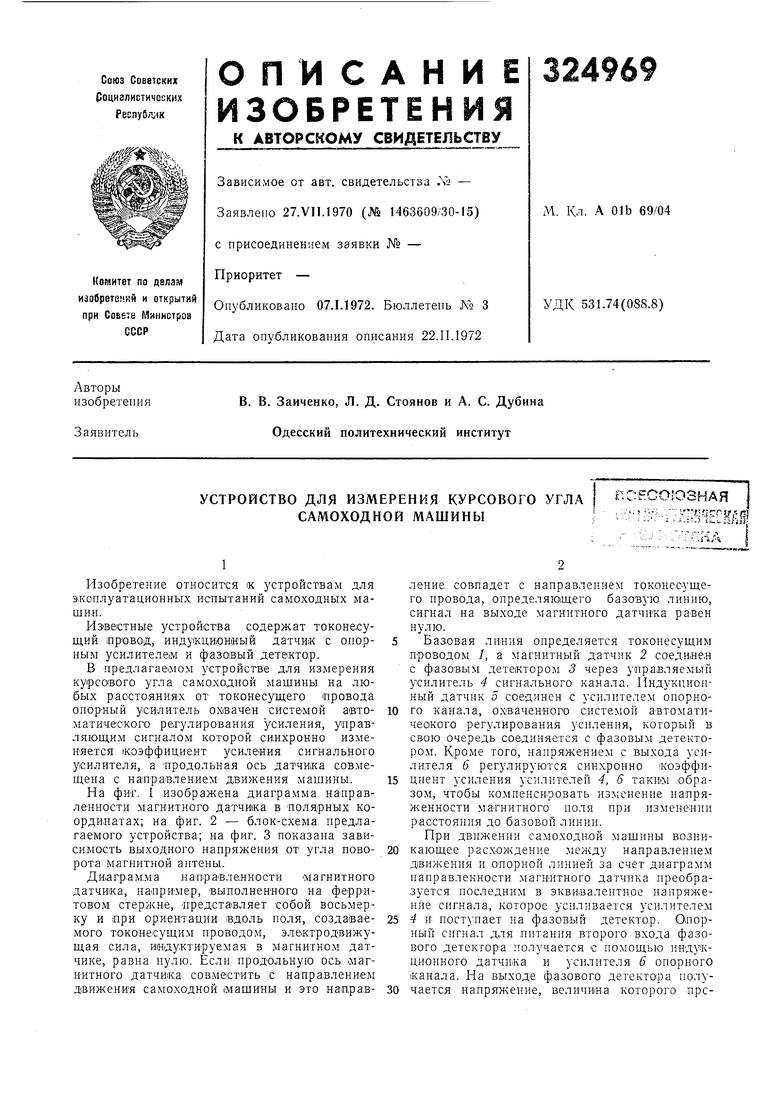
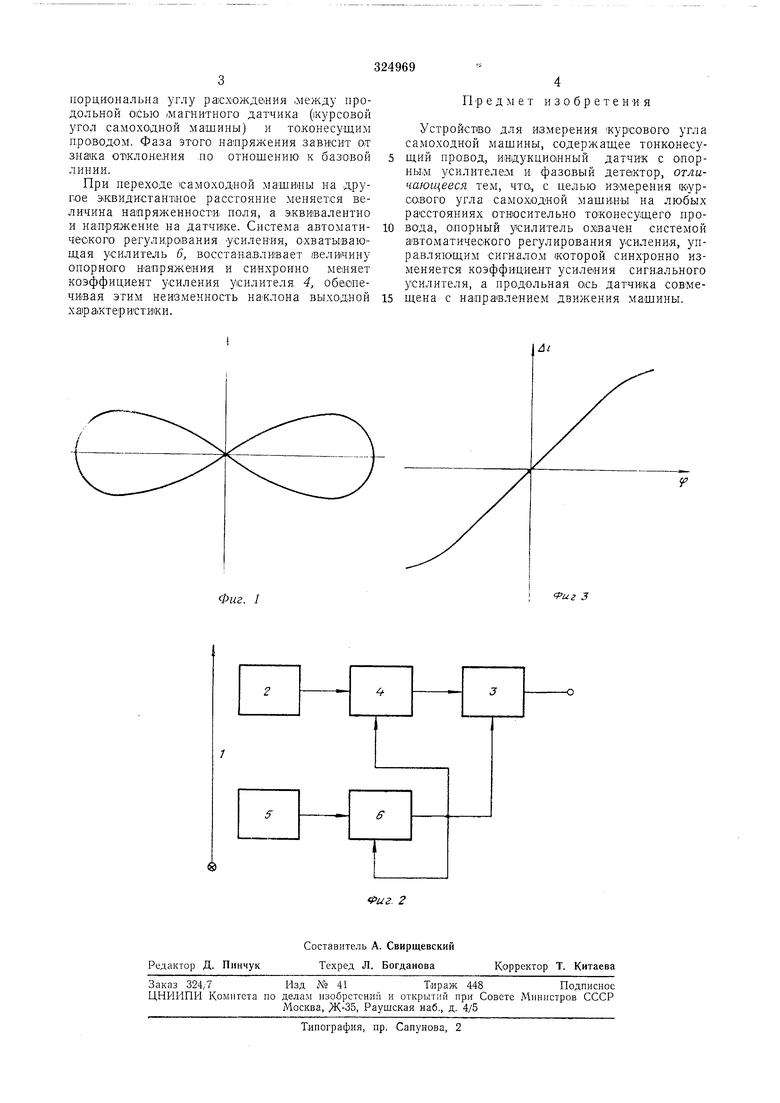
На фиг. 1 изображена диаграмма направленности магнитного датчика в полдрных координатах; на фиг. 2 - блок-схема предлагаемого устройства; на фиг. 3 показана зависимость выходного напряжения от угла поворота магнитной антены.
Ди1аграм,ма направленности магнитного датчика, например, выполиенного на феррптовом стержне, представляет собой восьмерку и при ориентации вдоль ноля, создаваемого токонесущим проводом, электродвижущая сила, индуктируемая в магнитном датчике, равна нулю. Если продольную ось магнитного датчика совместить с направлением движения самоходной 1мащины и это HaiupaBление совпадет с направлением токонесущего провода, определяющего базовую линию, сигнал на выходе магнитного датчика равен нулю.
Базовая линия определяется токонесущим проводом /, а магнитный датчик 2 соединен с фазовым детектором 3 через управляемый усилитель 4 сигнального канала. Индукционный датчик 5 соединен с усилителем опорного канала, охваченного системой автоматического регулирования усиления, который в свою очередь соединяется с фазовым детектором. Кроме того, напряжением с выхода усилителя 6 регулируются синхронно коэффициент усиления усил1;телей 4, 6 таким образом, чтобы компенсировать изменение напряженности ма-гнитного ноля при изменепии расстояния до базовой линии. При движении самоходной машины возникающее расхождение между направлением движения и опорной линией за счет диаграмм направленности магнитного датчика преобразуется последним в эквигвалентное напряжение сигнала, которое усиливается усилителем
4 и поступает на фазовый детектор. Опорный сигнал для питания второго входа фазового детектора получается с помощью индукционного датчика и усилителя 6 опорного канала. На выходе фазового детектора полупорциональна углу расхождения (Между продольной осью магнитного датчика (1курсовой угол самоходной машины) и токонесущим проводом. Фаза этого наиряжения зависит от знака отклонения ло отношению к базовой линии.
При переходе самоходной машины на другое эквидистантйое расстояние меняется величина наиряженности поля, а эквивалентно и напряжение на датчике. Система автоматического регулирования усиления, охватывающая усилитель 6, восстанавливает величину опорного н-апряжения и си«хронно меняет коэффициент усиления усилителя 4, обеспечивая этим неизменность наклона выходной характеристики.
П р е д .м е т изобретения
Устройство для измерения курсового угла самоходной мащины, содержащее тонконесущий провод, иидукционный датчик с опорНЫ)М усилителем и фазовый детектор, отличающееся тем, что,, с целью измерения курсового угла самоходной машины на любых расстояниях относительно токонесущего провода, опорный усилитель охвачен системой автоматического регулирования усиления, управляющим сигналом которой синхронно изменяется коэффициент усиления сигнального усилителя, а продольная ось датчика сов-мещена с направлением движения машины.