1
1303993
Изобретение относится к автоматическому регулированию и управлению и предназначено для управления вынужденным движением нестационарных динамических объектов, описываемых уравнением
y4t) -t- a,,(t)(t) + ... +
+ a,(t)y(t) d,(t)f, (t) + ... +
+ d(t)f(t) + u(t).
нал y(t) поданный с объекта 1 управления, сравнивается с сигналом у (t), выработанным задатчиком 2 в блоке 3 сравнения. Полученная ошибка x(t) поступает непосредственно на вход первого модульного элемента 5 , а на входы остальных (5 ,,..,5) - через
дифференциаторы 4
z
1
,4 соответствующих порядков. Сигналы, полученПредполагается , что параметры объекта JO ные на выходе первых модульных эле- а .(t) (i 1,n) меняются произвольным ментов 5,... ,5, поступают через сонеконтролируемьш образом в известных диапазонах, определяемых константами
a(i Т7Н)
a(t) а;,
переменные параметры dj(t) (j 1,k) нестационарных каналов воздействия на объект внешних возмущений также считаются неизвестными функциями времени, удовлетворяющими условиям
.(t)-d;.,
ответствующие первые усилители , ...,6 на вход первого сумматора 7 и с его выхода - на вход блока 8 умНо15 женин. Сигналы ошибки регулирования x(t) и ее производных, полученных на вь1ходе дифференциаторов 4 ,, .. . ,4,, поступают через вторые усилители 9, ...,9. на вход второго сумматора 10,
20 .с выхода которого сигнал поступает на первый вход (делимое) блока 11 деления, а с выхода последнего сигнал поступает н вход усилителя 12 с насьш1ением, своим
т ,, . . Vвыходом подключенного к входу инерцигде d, (j 1,k) - известные константы. онного фильтра 18. Величины внешних Рассматриваемая задача управления
формулируется следующим образом. Необходимо обеспечить компенсацию ошибки регулирования
30
x(t) y(t) - y(t),
где у (t) const - задающее воздействие, до заданной величины, т.е. обеспевоздеиствии, полученные на датчиках 13 , . . ., 13j(, поступают последовательно на вторые модульные элементы 14 , ...,14ц, а с их выхода на третьи 15/, ...,15 и четвертые 16,,...,16 усилители, выходами подключенные с оот-. ветственно к первому 7 и третьему 17 сумматорам. С выхода третьего суммато ра 17 сигнал подается на второй вход
воздеиствии, полученные на датчиках 13 , . . ., 13j(, поступают последовательно на вторые модульные элементы 14 , ...,14ц, а с их выхода на третьи 15/, ...,15 и четвертые 16,,...,16 усилители, выходами подключенные с оот-. ветственно к первому 7 и третьему 17 сумматорам. С выхода третьего суммато ра 17 сигнал подается на второй вход
чить выполнение неравенства |x(t)|44, ,, инерционного фильтра 18, соединенногде л- заданная постоянная положительная константа.
Цель изобретения - повьш ение надежности и грубости системы управления.
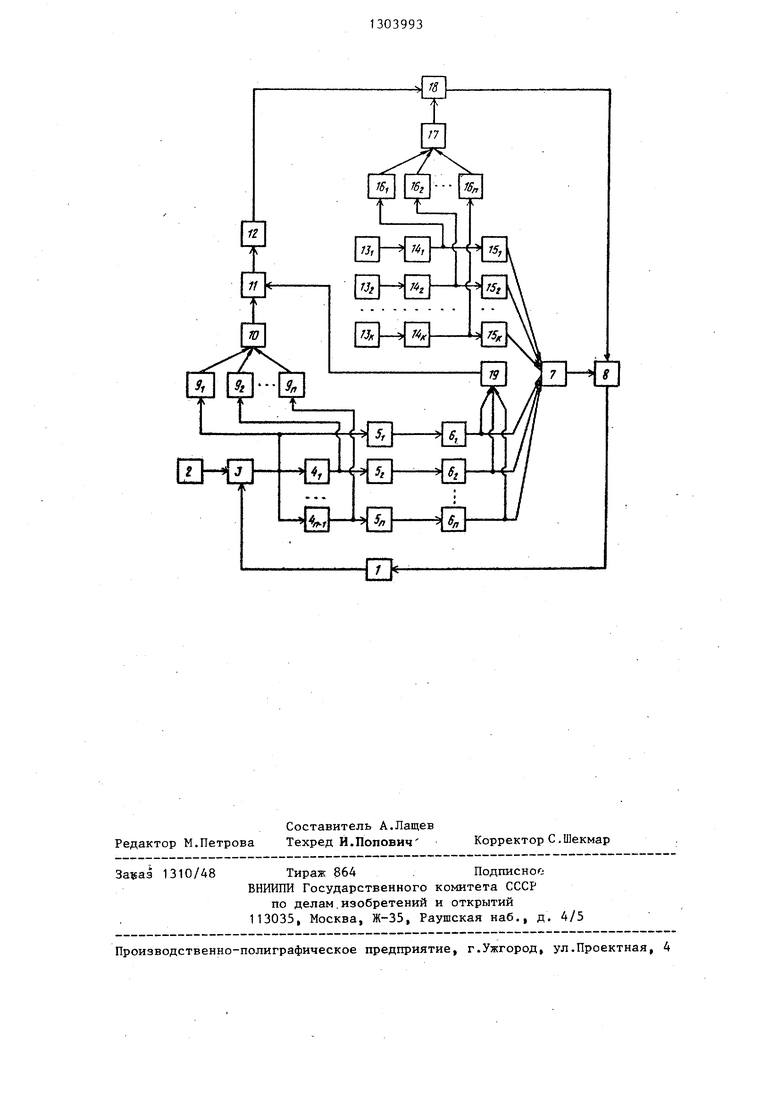
На чертеже представлена схема предлагаемой бинарной системы..
Схема содержит объект 1 управления, задатчик 2, вырабатывающий сигнал у(t), блок 3 сравнения, дифференциаторы 4,,,..4„,,, первые модульные элементы 5 ,. . ., 5 , первые усилители 6.(,...,6, первый сумматор 7, блок 8 умножения, вторые усилители 9,,...,9, второй сумматор 10, блок 11 деления, усилитель12 с насьш ением, датчики 13 ,.. ., 13j внешних воздействий, вторые модульные элементы 14,,
40
го выходом с вторым входом блока 8, на выходе последнего формируется сигнал управления u(t), подаваемый на объект 1 управления. На второй вход блока деления (делитель), на выходе которого формируется сигнал ошибки координатно-операторного контура, сигнал подается с выхода .четвертого сумматора 19, на вход кото- рого поступают сигналы с выходом первых усилителей 6,...,6. В предлагаемой системе по сравнению с известной иной способ образования контура координатно-операторной обратной связи. В предлагаемой схеме он образуется вторыми усилителями 9,,...,9, вторым сумматором 10, четвертым сумматором 19, блоком 11 деления, усилителем 12 с насьш5ением, четвертыми
50
...,14, третьи усилители 15 ,,...,15 , четвертые усилители 16,,..., 16, тре- г г усилителями . 16 ,,..., 16 , третьим сум- тий сумматор 17, инерционный фильтр матером 17 и инерционным фильтром 18. 18, четвертый сумматор 19.Регулятор описывается следующими соПредставим способ функционирования отношениями: предлагаемой системы управления. Сиг- u(t) H(t)(k x(t) + e°lf(t)( ;
нал y(t) поданный с объекта 1 управления, сравнивается с сигналом у (t), выработанным задатчиком 2 в блоке 3 сравнения. Полученная ошибка x(t) поступает непосредственно на вход первого модульного элемента 5 , а на входы остальных (5 ,,..,5) - через
дифференциаторы 4
z
1
,4 соответствующих порядков. Сигналы, полученные на выходе первых модульных эле- ментов 5,... ,5, поступают через соответствующие первые усилители , ...,6 на вход первого сумматора 7 и с его выхода - на вход блока 8 умНоженин. Сигналы ошибки регулирования x(t) и ее производных, полученных на вь1ходе дифференциаторов 4 ,, .. . ,4,, поступают через вторые усилители 9, ...,9. на вход второго сумматора 10,
.с выхода которого сигнал поступает на первый вход (делимое) блока 11 деления, а с выхода последнего сигнал поступает на вход усилителя 12 с насьш1ением, своим
онного фильтра 18. Величины внешних
воздеиствии, полученные на датчиках 13 , . . ., 13j(, поступают последовательно на вторые модульные элементы 14 , ...,14ц, а с их выхода на третьи 15/, ...,15 и четвертые 16,,...,16 усилители, выходами подключенные с оот-. ветственно к первому 7 и третьему 17 сумматорам. С выхода третьего сумматора 17 сигнал подается на второй вход
инерционного фильтра 18, соединенно
го выходом с вторым входом блока 8, на выходе последнего формируется сигнал управления u(t), подаваемый на объект 1 управления. На второй вход блока деления (делитель), на выходе которого формируется сигнал ошибки координатно-операторного контура, сигнал подается с выхода .четвертого сумматора 19, на вход кото- рого поступают сигналы с выходом пер вых усилителей 6,...,6. В предлагаемой системе по сравнению с известной иной способ образования контура координатно-операторной обратной связи. В предлагаемой схеме он образуется вторыми усилителями 9,,...,9, вторым сумматором 10, четвертым сумматором 19, блоком 11 деления, усилителем 12 с насьш5ением, четвертыми
усилителями . 16 ,,..., 16 , третьим сум- матером 17 и инерционным фильтром 18. Регулятор описывается следующими соiM(t) -()u(t)-fsat(A(t))()(f(t)|); Д(t)6-(t)/(S1x(t)),в(t)cx(t),
где u(t),(t),X(t) - сигналы различ- . ных контуров
системы,
k° ,е° , at% ot и с - коэффициенты усиления блоков 6
15
к
15,,.. 16i
1
18, lu, . . ,, 16, 9,9,,
10 и 11 соответственно, определяемые требованиями к качестЕдг 5 регулирования в системе.
Как следует из приведенных соотношений, при стремлении ошибки
конечное время в заданную окрестност & при обеспечении заданной динамики переходного процесса.
Покажем справедливость последней оценки на x(t). Перепишем исходное уравнение относительно ошибки регули рования x(t) у(t) - y(t)
x(t) A(t)x(t) + D(t)f(t) +
+ u(t), xeR ,(3)
матрицы A(t) и D(t) состоят из параметров (t) (i 1,n), d.j(t) (j 1,k). Уравнение (3) в координатах (x ,©), x R примет вид:
10
fi {б-
agx + + , (4)
AX+ h,(-b c
где Aj,h,D ,ag,hg., Cg-связ аны с параметрами a,-(i 1,n),dj(j 1 ,k)
регулирования x(t) сигнал управления 20 Очевидным образом. Соответствующим .u(t) уменьшается до некоторой малой ве- выбором вектора с можно обеспечить
выполнение следующих неравенств:
flT(t е)|1 (-8/t-r)), с ,8„ О - const,
О О
гдeФ(t,(r) - матрица Коши уравнения
личины, оставаясь при этом все время гладкой функцией. Параметры регулятог ра являются конечными величинами, выбираемыми исходя из соотношений: 25
k%M.Kc sup )| /0) . /(с t&u))d(t)|
а мако sup
Icifio)/
of маке sup g ( Kc±SuJ)a(t)/ + tuJfil 7/to
+ KC ±ScJ )/k ) , sup Д (I (c+ScJ )d(t)/ +
luilf.1 i,to
+ /c±Su)| e°).
(1) 30
А X
и
1(3)(t)fll fe d exp(-a(t - t.)),
A .7
d,a 0 - const.
При выполнении соотношения на коэффи циенты усиления (1) существует конеч 35 нь1й j oMeHT времени такой, что
1 :|&I4S|| (I Д тогда, переписав
первое уравнение из (4) в интеграль ной форме, оценку при
Динамика управляемых процессов x(t) в системе полностью определяется выбором коэффициентов с вторых усилителей 9..9f,, и при этом справедлива следующая оценка:45
Hx(t)N 6 M( f/x(t,-)// exp(-S(t - ,(2)
- to
50
где M H - положительные константы, a величина A О может быть сделана сколь угодно малой соответствующим вы- 6oifoM параметров регуля- « тора.
Из последнего неравенства следует, что данная система является диссипа- тивной и ее траектории погружаются за
5
039934
конечное время в заданную окрестность & при обеспечении заданной динамики переходного процесса.
Покажем справедливость последней оценки на x(t). Перепишем исходное уравнение относительно ошибки регулирования x(t) у(t) - y(t)
x(t) A(t)x(t) + D(t)f(t) +
+ u(t), xeR ,(3)
матрицы A(t) и D(t) состоят из параметров (t) (i 1,n), d.j(t) (j 1,k). Уравнение (3) в координатах (x ,©), x R примет вид:
10
fi {б-
agx + + , (4)
AX+ h,(-b c
где Aj,h,D ,ag,hg., Cg-связ аны с параметрами a,-(i 1,n),dj(j 1 ,k)
Очевидным образом. Соответствующим выбором вектора с можно обеспечить
А X
30
и
1(3)(t)fll fe d exp(-a(t - t.)),
A .7
d,a 0 - const.
40
45
При выполнении соотношения на коэффициенты усиления (1) существует конеч- 35 нь1й j oMeHT времени такой, что
1 :|&I4S|| (I Д тогда, переписав
первое уравнение из (4) в интегральной форме, оценку при
j|x4t)(| 6 с // x (t)// exp(-$(t - t,)) -ь c
sup f(hj| f (//x(t) +
t .to Ч,
+ u)exp(-6(t -r))dl.+
t + JexpfS Ct -t-))exp(-a(t -c-))
из которого по лемме Гронуолла-Бепма- на следует приведенная оценка (2).
Приведем иллюстративный пример. Дан управляемый объект, заданный в канонической форме:
. 1 л.
x,g a,,(t) a(.t)xj d (tH4 + d,(t)(t)f,-.,
параметры которого меняются в диапазонах:
a,(t),U;a ЮеЕЧ.ОЗ; d, (tkC-t.OJ; d,j(t:)el-1,5; 0. dj(t),5; 0,31.
Пусть стоит задача обеспечения дисси пативности системы в области А i и чтобы переходный процесс имел показатель периодичности 0,75. Поскольку показатель в оценке (2) имеет следующий вид:;
S & - 8 ( 1 + MQKC
cJ( -5).
ВИДНО, чтобы обеспечить заданн лй показатель апериодичности необходимо выбрать параметры S 0,2, с {1,1). Из соотношений (1) выбираем остальные параметры регулятора k ° (2j 4); г° (2,3,1); - (54,81, о(- 72. Таким образом, приведенный пример показывает, что предлагаемая система позволяет решить поставленную задачу управления.
Фор мул а изобретения
Бинарная система управления, содержащая последовательно соединенные пер
O
вый сумматор, блок умножения, вторым -входом подключенный к выходу инерционного фильтра, объект управления, блок сравнения, второй вход которого подклю чей к выходу задатчика, а выход - к входам дифференциаторов, выходы которых и выход блока сравнения через после,-- довательно соединенные первые модульные элементы и первые усилители соединены с входом первого сумматора и через соответствующие вторые усилители - с входом второго сумматора, датчики возмущений, выходы которых через соответствующие последовате льно соединен5 ные вторые модульные элементы и третьи усилители соединены с входом пер-, вого сумматора и через последовательно соединенные вторые модульные элементы и четвертые усилители - с входом
0 третьего сумматора, выход которого подключен к входу инерхщонного фильтра, отличающаяся тем, что, с целью повышения надежности и грубости системы, она содержит четвер- 25 тый сумматор, усилитель с насыщением и последовательно соединенные блок деленияt первый и второй вход которого подключены соответственно к выходам второгооИ четвертого -сумматора, к вхо0 ду которого подключены выходы первых усилителей, а выход усилителя с насыщением подключен к второму входу инерционного фильтра.
| название | год | авторы | номер документа |
|---|---|---|---|
| Бинарная система оптимальной стабилизации | 1988 |
|
SU1837255A1 |
| Бинарная система управления | 1985 |
|
SU1294798A1 |
| Бинарная система управления | 1988 |
|
SU1837254A1 |
| Бинарная система управления | 1988 |
|
SU1640670A1 |
| Бинарная система управления | 1984 |
|
SU1140095A1 |
| Бинарная система управления объектами с запаздыванием | 1986 |
|
SU1383294A1 |
| Бинарная система управления вынужденным движением | 1983 |
|
SU1117587A1 |
| СИСТЕМА ИДЕНТИФИКАЦИИ ОБЪЕКТОВ УПРАВЛЕНИЯ | 2012 |
|
RU2486563C1 |
| Адаптивная система управления | 1986 |
|
SU1399700A1 |
| Система управления вибратора | 1986 |
|
SU1315936A1 |
Изобретение относится к технике автоматического регулирования .и управления и выполнено в рамках бинарных систем. Целью изобретения является повьшение надежности и грубости системы управления. Цель изобретения достигается за счет специального способа построения контура координатно- операторной обратной связи. Изобретение предназначено для управления .вынужденным движением нестационарных динамических систем, работающих в условиях неопределенности, обусловленной произвольным неконтролируемым изменением параметров объекта управления и внешних возмущений в извест- . ных диапазонах. Система дополнительно содержит сумматор, усилитель с насыщением, блок деления. Изобретение может быть использовано при автоматизации различных процессов, в частности процессов аглодоменного производства. 1 ил. Ш (Л со о со со со со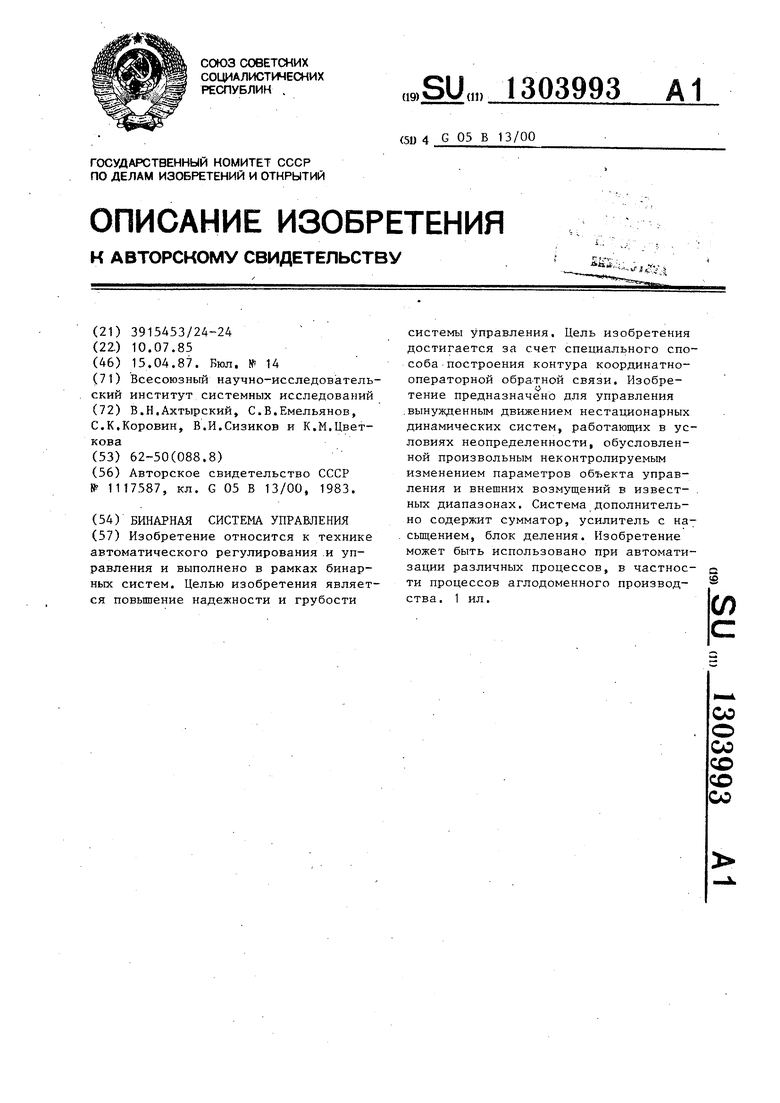
Составитель А.Лащев Редактор М.Петрова Техред И.Попович Корректор С,Шекмар
За«а1 1310/48
Тираж 864 . Подписное ВНИИПИ Государственного комитета СССР
по делам.изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
| Бинарная система управления вынужденным движением | 1983 |
|
SU1117587A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
