Изобретение относится к измерительной технике и может быть использовано в качестве устройства перемещения измерительного зонда для измерения радиотехнических параметров антенны.
Известно устройство для перемещения измерительного зонда в раскрыве антенны, содержащее горизонтальную направляющую и установлен-ную на ней с возможностью перемещения горизонтальную каретку, на которой закреплены вертикальная направляющая с установленной на ней с возможностью перемещения вертикальной кареткой с измерительным зондом, приводы горизонтальной и вертикальной кареток снабжены блоком автоматического управления приводами. Вертикальная каретка соединена гибкой передачей с соответствующим приводом и противовесом посредством гибкой связи и блока, закрепленного на вертикальной направ-. ляющей ij .
Однако данное устройство не обеспечивает необходимых траекторий перемеиГения зонда и высокой эксплуатационной надежности.
Наиболее близким техническим решением к изобретению является известное устройство перемещения измерительного зонда, содержащее горизонтальную направляющую и установленную на ней с возможностью перемещения горизонтальную каретку, на которой закреплены ее привод и вертикальная стойка, несущая на своем конце планетарный- механизм, привод планетарного механизма с выходными коаксиальными валами, на наружном установлено центральное колесо, соединенное первой гибкой передачей с первым сателлитом, а на внутреннем закреплено водило, в котором установлена направляющая с размещенным на ней измерительным зондом, причем первый сателлит й первое колесо второй гибкой передачи установлены на первом конце направляющей, и блок управления приводами, при этом измерительный зонд установлен в ползуне с возмох ностью вращения вокруг своей оси и .снабжен дополнительным колесом, зацепленным с перво.й гибкой передачей, одна из ветвей которой неподвижно соединена с ползуном 2J .
Однако известное устройство перемещения измерительного зонда имеет ограниченные возможности перемещения
не обеспечивает высокой эксплуаационной надежности из-за отсутстия уравновешивающего устройства а инерционную массу направляющей (каретки) с установленным зондом ри статическом и динамическом ее оложениях.
Целью изобретения является расширение возможностей перемещения и повышение эксплуатационной надежности.
Цель достигается тем, что в устройстве перемещения измерительного зонда, содержащем горизонтальную направляющую и установленную на ней с возможностью перемещения горизонтальную каретку, на которой закреплены привод ее перемещения и вертикальная стойка, несущая на своем конце планетарный механизм; привод планетарного механизма с выходными коаксиальными валами, на наружном установлено центральное . колесо, соединенное первой гибкой передачей с первым сателлитом, а на внутреннем закреплено водило, в котором установлена первая направляющая с размещенным на ней первым измерительным зондом, причем первый сателлит и первое колесо второй гибкой передачи установлены на первом конце первой направляющей, и блок управления приводами, первый измерительный зонд установлен на первом конце первой направляющей, введены второй сателлит, второе колесо второй гибкой пер.едачи, второй измерительный зОнд, установленные на втором конце первой направляющей, передаточный механизм и уравновешивающее устройство с второй направляющей, первая направляющая установлена в водиле с возможностью поступательного движения, каждый измерительный зонд установлен на оси соответствующего сателлита, вторая гибкая передача снабжена отдельным приводом, первое и второе колеса которой установлены на первой направляющей с возможностью фиксации, передаточный механизм закреплен на водиле и кинематически связывает между собой обе гибкие передачи, выходные коаксиальные валы привода планетарного механизма установлены на вертикальной стойке с возможностью поочередной фиксации, а уравновешивающее устройство с второй направляющей установлено на водиле и кинематически связано с первой направляющей с возможностью взаимного поступательного перемещения в противоположных направлениях.
При этом уравновешивающее устройство выполнено в виде двух противовесов, каждый из которых закреплен на противоположных концах второй направляющей; установленной параллельно первойнаправляющей, при этом обе направляющие кинематиески связаны храповым механизмом вустороннего действия.
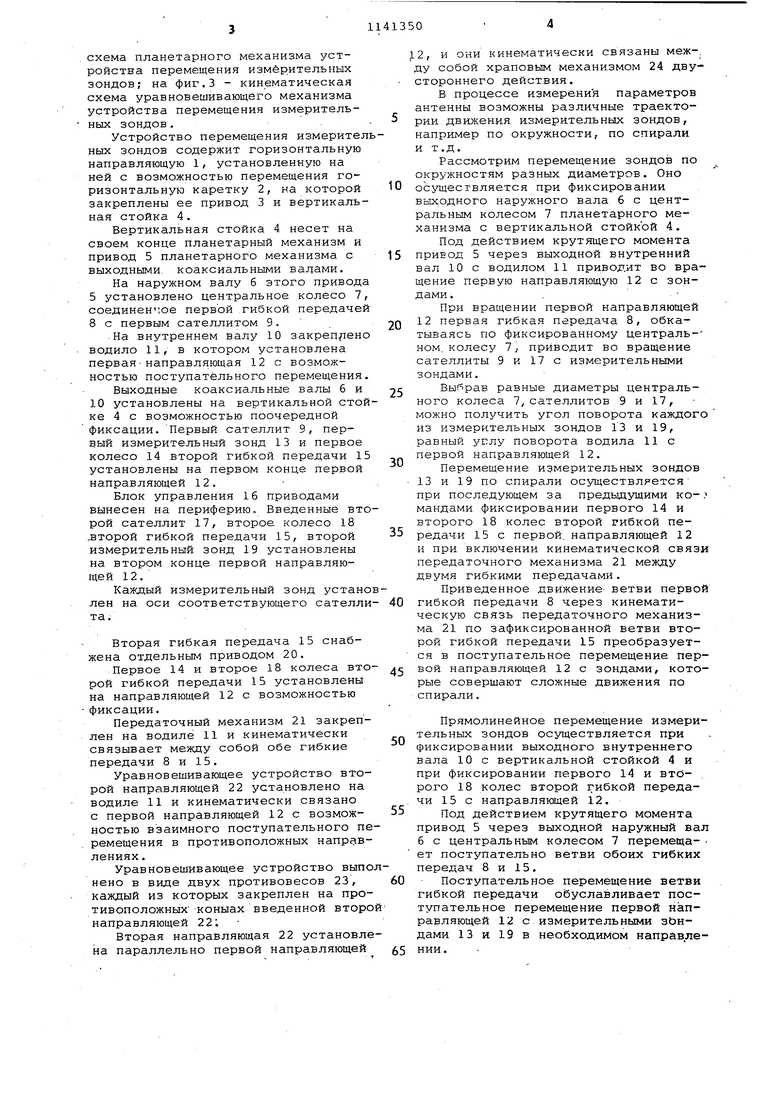
На фиг.1 показано устройство пеемещения измерительных зондов , обий вид; на фиг.2 - кинематическая
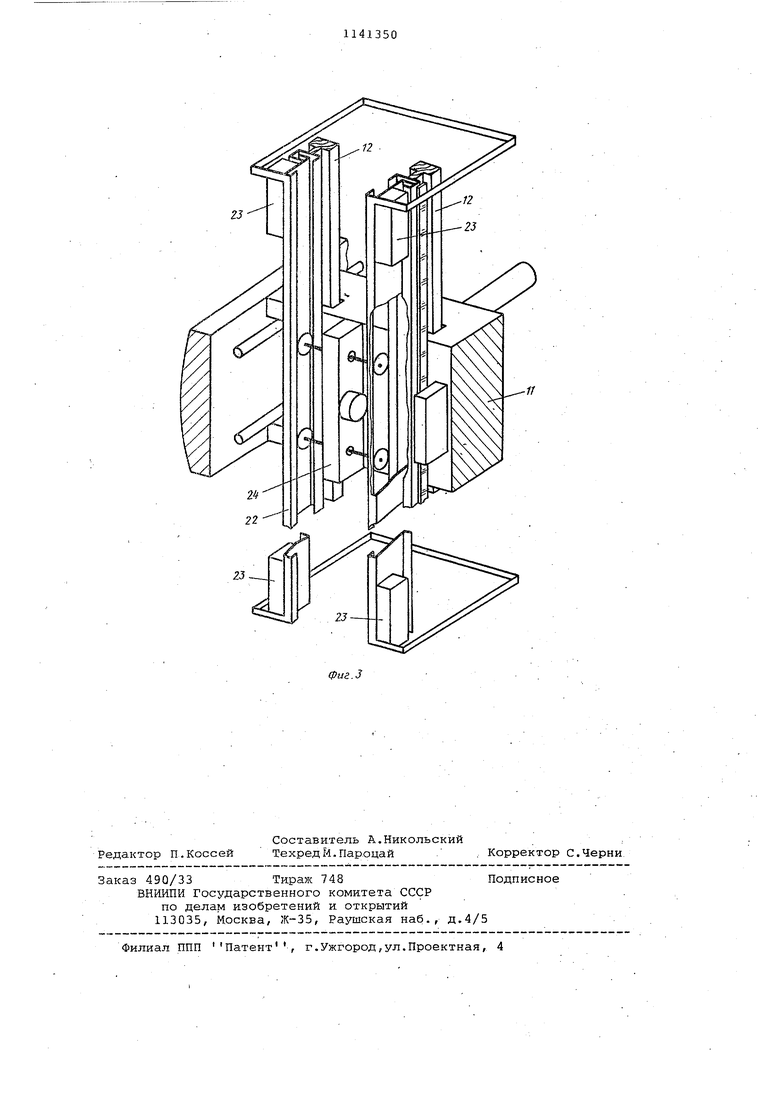
схема планетарного механизма устройства перемещения измерительных зондов; на фиг.3 - кинематическая схема уравновешивающего механизма устройства перемещения измерительных зондов.
Устройство перемещения измерителных зондов содержит горизонтальную направляющую 1, установленную на ней с возможностью перемещения горизонтальную каретку 2, на которой закреплены ее привод 3 и вертикальная стойка 4.
Вертикальная стойка 4 несет на своем конце планетарный механизм и привод 5 планетарного механизма с выходными, коаксиальными вацами.
На наружном валу б этого привода 5 установлено центральное колесо 7, соединенное первой гибкой передачей 8 с первым сателлитом 9.
На внутреннем валу 10 закреп/тено водило 11, в котором установлена перваянаправляющая 12 с возможностью поступательного перемещения.
Выходные коаксиальные валы б и 10 установлены на вертикальной стойке 4 с возможностью поочередной фиксации. Первый сателлит 9, первый измерительный зонд 13 и первое колесо 14 второй гибкой передачи 15 установлены на первом конце первой направляющей 12.
Блок управления 16 приводами вынесен на периферию. Введенные второй сателлит 17, второе колесо 18 .второй гибкой передачи 15, второй измерительный зонд 19 установлены на втором конце первой направляющей 12.
Каждый измерительный зонд устанолен на оси соответствующего сателлита.
Вторая гибкая передача 15 снабжена отдельным приводом 20.
Первое 14 и второе 18 колеса второй гибкой передачи 15 установлены на направляющей 12 с возможностью фиксации.
Передаточный механизм 21 закреплен на водиле 11 и кинематически связывает между собой обе гибкие передачи 8 и 15.
Уравновешивающее устройство второй направляющей 22 установлено на водиле 11 и кинематически связано с первой направляющей 12 с возможностью взаимного поступательного перемещения в противоположных направлениях.
Уравновешивающее устройство выпонено в виде двух противовесов 23, каждый из которых закреплен на противоположных коныах введенной второ направляющей 22;
Вторая направляющая 22 установлена параллельно первой направляющей
12, и они кинематически связаны меж-, ду собой храповым механизмом 24 двустороннего действия.
В процессе измерения параметров антенны возможны различные траектории движения измерительных зондов, например по окружности, по спирали и т.д.
Рассмотрим перемещение зондов по окружностям разных диаметров. Оно 0 осуществляется при фиксировании
выходного наружного вала 6 с центральным колесом 7 планетарного механизма с вертикальной стойкой 4.
Под действием крутящего момента 5 привод 5 через выходной внутренний вал 10 с водилом 11 приводит во вращение первую направляющую 12 с зондами..
При вращении первой направляющей Q 12 первая гибкая передача 8, обкатываясь по фиксированному центральном, колесу 7, приводит во вращение сателлиты 9 и 17 с измерительными зондами.
равные диаметры центрального колеса 7,сателлитов 9 и 17, можно получить угол поворота каждого из измерительных зондов 13 и 19, равный углу поворота водила 11 с первой направляющей 12.
Перемещение измерительных зондов - 13 и 19 по спирали осуществляется при последующем за предыдущими командами фиксировании первого 14 и второго 18 колес второй гибкой передачи 15с первой, направляющей 12 и при включении кинематической связи передаточного механизма 21 между двумя гибкими передачами.
Приведенное движение- ветви первой 0 гибкой передачи 8 через кинематическую связь передаточного механизма 21 по зафиксированной ветви второй гибкой передачи 15 преобразуется в поступательное перемещение первой направляющей 12 с зондами, которые совершают сложные движения по спирали.
Прямолинейное перемещение измерительных зондов осуществляется при
фиксировании выходного внутреннего вала 10 с вертикальной стойкой 4 и при фиксировании первого 14 и второго 18 колес второй гибкой передачи 15 с направляющей 12.
Под действием крутящего момента привод 5 через выходной наружный вал б с центральным колесом 7 перемеща- ет поступательно ветви обоих гибких передач 8 и 15.
Поступательное перемещение ветви гибкой передачи обуславливает поступательное перемещение первой направляющей 12 с измерительными зЬндами 13 и 19 в необходимом направлеНИИ.
Блок 16 управления приводами производит корректировку перемещения первой направляющей 12 посредством управления отдельными приводом 20 второй гибкой передачи 15.
Перемещения первой направляющей 12 с измерйтельньоми зондами 13 и 19 относительно водила 11 уравновешиБаются противовесами 23 при одинаковом перемещении направляющей 22 в противоположном направлении и самоблокируются храповым механизмом 24 двустороннего действия.
Установка первой направляющей 12 с измерительными зондами 13 и 19 в водиле 11 с врзможностью возвратнопоступательного движения, фиксация колес второй гибкой передачи 15 с
первой направляющей 12 и возможности поочередной фиксации центрального колеса 7 и водила 11 планетарного механизма для сложного движения измерительного зонда обеспечивают возможность воспроизводить любые траектории сканирования, что расширяет сферу перемещения.
Наличие уравновешивающего уст- ройства со второй, направляющей для возможности уравновешивания инерционных масс исключает динамические воздействия на элементы конструкции.
Отсутствие динамических воздействий на элементы конструкции исключает заклинивание и поломку элементов устройства, что повышает эксплуатационную надежность при сканировании.
| название | год | авторы | номер документа |
|---|---|---|---|
| Сканирующее устройство измерительного зонда | 1982 |
|
SU1084705A1 |
| Механизм привода промышленного робота | 1989 |
|
SU1660959A1 |
| ДИФФЕРЕНЦИАЛЬНЫЙ КРИВОШИПНЫЙ ПРЕОБРАЗУЮЩИЙ МЕХАНИЗМ ПРИВОДА СТАНКА-КАЧАЛКИ | 2005 |
|
RU2303182C2 |
| Привод штанговой скважинной насосной установки | 2023 |
|
RU2820080C1 |
| Манипулятор с возвратно-поступательным движением захватных устройств | 2023 |
|
RU2822909C1 |
| ДИФФЕРЕНЦИАЛЬНЫЙ КРИВОШИПНЫЙ МЕХАНИЗМ ПРИВОДА ШТАНГОВОГО СКВАЖИННОГО НАСОСА | 2002 |
|
RU2246650C2 |
| Устройство для захвата и подачи плоских изделий | 1986 |
|
SU1375548A1 |
| УСТАНОВКА ДЛЯ ОБРАБОТКИ ПОВЕРХНОСТИ ИЗДЕЛИЙ ИЗ БЕТОННЫХ СМЕСЕЙ | 1992 |
|
RU2012497C1 |
| РЕГУЛИРУЕМАЯ ПЛАНЕТАРНАЯ ЗУБЧАТАЯ ПЕРЕДАЧА | 1991 |
|
RU2006723C1 |
| Планетарно-винтовой механизм | 1978 |
|
SU724844A1 |
1.УСТРОЙСТВО ПЕРЕМЕЩЕНИЯ ИЗМЕРИТЕЛЬНЫХ ЗОНДОВ, содержащее горизонтальную направляющую и установленную на ней с возможностью перемещения горизонтальную каретку, на которой закреплены привод ее перемещения и вертикальная стойка, несущая на своем конце планетарный механизм, привод планетарного ме:ханизма с выходными коаксиальными валами, на наружном установлено центральное колесо, соединенное первой гибкой передачей с сателлитом, а на внутреннем закреплено водило, в котором установлена первая направляющая с размещенным на ней первым измерительным зондом, причем первый сателлит и . первое колесо второй гибкой передачи установлены на первом конце первой направляющей, и блок управления приводами, отличающеес я тем, что, с Целью расширения возможностей перемещения и повышения эксплуатационной надежности, первый измерительный зонд установлен на первом конце первой направляющей, введены второй сателлит. второе колесо второй гибкой передачи, второй измерительный зонд, установленные на втором конце первой направляющей, передаточный механизм и уравновешивающее устройство с второй направляющей, первая направляющая установлена в водиле с возможностью поступательного движения, каждый измерительный зонд установлен на оси соответствующего сателлита, вторая гибкая передача снабжена отдельным приводом, первое и второе колеса которой установлены на первой направляющей с возможностью фиксации, передаточный механизм закреплен на водиле и кинематически связывает между собой обе гибкие передачи, выходные 1 оаксиаль(Л ные валы привода планетарного механизма установлены на вертикальной стойке с возможностью поочередной фиксации,а уравновешивающее устройство с второй направляющей установлено в водиле и кинематически связано с первой направляющей с возможностью взаимного поступательного перемещения в противоположных направлениях. 2.Устройство по П.1, отличающееся тем, что уравновешивающее устройство выполнено со ел в виде двух противовесов, каждый из которых закреплен на противопог ложных концах второй направляющей, установленной параллельной первой направляющей, при этом обе направляющие кинематически связаны храповым механизмом двустороннего действия.
W
2
16
Itt
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
