(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ САМОХОДНОЙ СЕЛЬСКОХОЗЯЙСТВЕННОЙ МАШИНОЙ
1 Изобретение относится к сепьскохсм.
зяйственному машиностроению, в частности к устройствам для управления самоходаыми сельскохозяйственными машинами, используемыми на уборке ксрнепподов.
Известно устройство для ручного и автоматического управления трактором илн сельскохозяйственной машиной прв двюкении по р1эду растений, включаюшее узел дистанционного ручного управления, кинематически связанный с распредеш телем пцфомеханической слепящей системы посредством тормэзного звена, вы полненного в виде пары постоянно сжатых фртошонных дисков fll
Однако для этого устройства характерны сложная конструкция тормозного звена к недостаточная надежность его работы, так как в процессе эксплуатации постепенно сжатие фрикцио1шых дисков уменьшается, наблюдаются проскальзывания в тормозном звене, что ухудшает качество автоматического управления, тормозное звено в этом устройстве требует постояннсаго кошропя к периодической регулярности.
Наиболее близким к Еэобретенню по технической сути является устройство для управления самоходной сельскохозяйственной машиной, содержащее узел дистанционного управл шя и следящую систеклу авт юматического управления с гидрораспределттгепем, котсзрлй связан с улра&ляемыМЕ колесами посредством сиотемы рычагов, снабженной тсрмозным зъеяам, управляемым гящхишшшдром одностороннего действия, связанным с напорной попоспью гвдрораспредепителя 2.
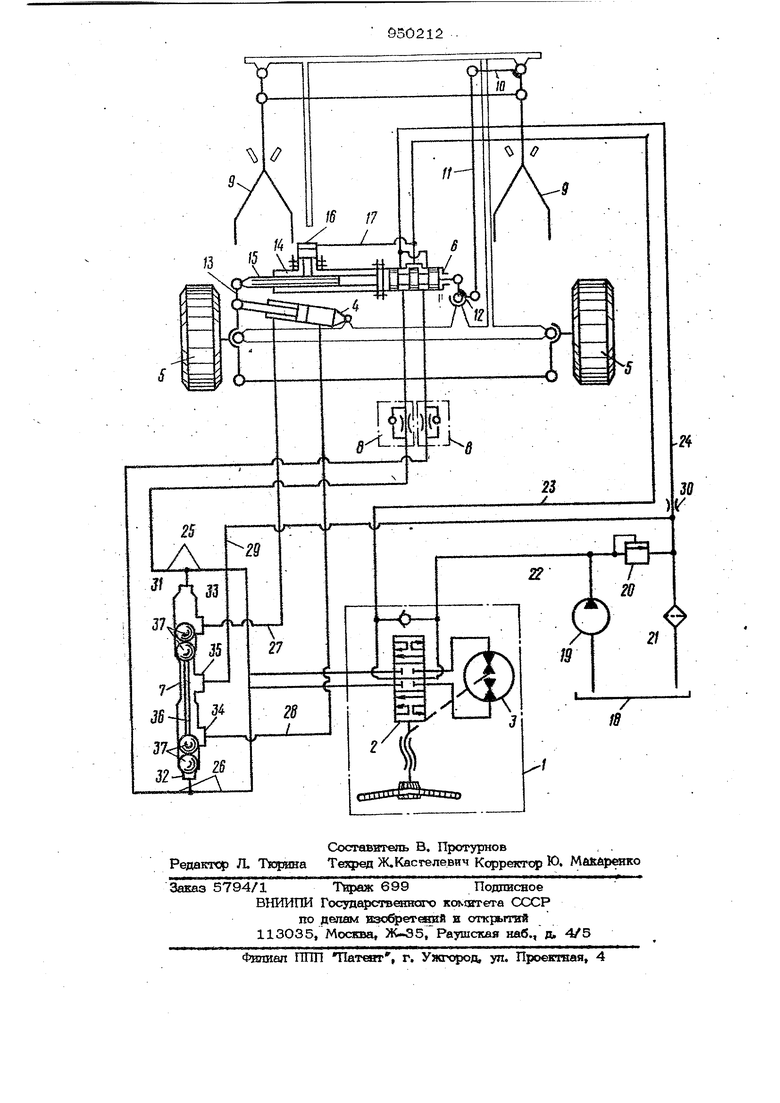
Однако наличие фрикционных дисков в отдельного Kqpnyca управляемого тормоза который необходимо мониесровать на раме машины, усложняет конструкшпо не только тормозного звена, но и рычажной системы, цепи входного сигнала и обрат вой связи в известном устройстве содержит много шарниров, рычагов и тяг, пчз уменьшает жесткость сяед5пцей системы 3 D и приводит к появленгао люфтов, снижаю ЩЕК качество есктоыатжческого управлетшя на гоне. Цепь изобретешь - повышшше топгос ти вождения маиппш и упрощение койстругашн устройства. Цель достигается тем, пю тормозное звено выполнено в виде телескош1 ческой тяги, наружная часть которой жестко связана с корпусом пццюраспределлтеля, при этом Kopnjc гвдрощ5гашд ра одностороннего действия эакретгаен на наружной части телескопической тяги для контактирования штока гящюшишндра с внутренней частью телескопической тяля. На чертеже изображена схема предлагаемого устройства. Устройство содержит узш дастшздионного ручного утфавления 1, который мо нет быть выполнен в виде пщрообъемкого руля с распредепитшвл 2 и шсос-дозатором 3, и пздроцшощдр 4 управляемых колес 5, связанный с распредегаятелем 2 гидрообъемного руля К с распределителем 6 следящей системы посредством трубопроводов с клаланной сжстемой. В последнюю входят шариковый переютючаквдий блок 7 и два комбетированкых элемента клалан-дроссепя 8, установлен таге в отводах распредегштеия.6, ГзДромеханйческая следящая система этого устройства, осушествпякадаа авахьматическое управление машины на гоне, включает кошфуюпще щупы 9, рьгчаг Ю, тягу 11 и дауплечий рычаг 12, щие цепь входного, сигнала н дазкфу 13 управляемых колес 5, связаниу1;о с рас пределителем 6 сяед5пцей сисягемы через телескопическую тягу о 1втной связи. Наружная часть 14 телесксша жестко связана с кортгусом распределителя 6, а внутренняя часть 15 - шарннрно с аапфо 13. В наружную часть 14 этой тяги вмо тирован односторонний гидрошшшуф 16, подктпоченный к полости нагнетания распределителя 6 через отвод 17. Такая тяга вьшолняет две функции она одковре менно является и тягой обратной связи и тормозным звеном, которое автоматиче ки обеспечивает жесткую фиксахдаю часте 14 и 15 телескопа в режиме автовождения {при отработке обратной связи) и расфиксирует эти части при ручном управ лешш, позволяя им взаимно перемещать ся когда при повороте рулевого колеса копирующие щупы 9 и распредеяЕРгель б остаются неподвижными или их движение 12 может бытг-. не согласовано с поворотом улравпяемых колес 5. Пздросистема устройства маслобак 18, насос 19, предохранительный клапан 2О, фгыхьтр 21 и сеть трубопро soflOB 22 29, коммутиру1о 1П1х элемен ты схеьсы. В трубопроводе 24 может быть установлен дроссель 30, В конструкции лерекшочаюшего блока 7 испапъзова- нь элементы шариковых обратных клапанов и клала на с логической ф;,таа1ней li. Он содержит корггус с входными 31 и 32, выходными 33 и 34 и слквной 35 полостями и седлами, толкатель 36 и шары 37, перемещаемые потоком в корпусных проточках, выпо/1ненных по диаметур шаров, а ютапан-дроссель 8 представляет собой ед1шый эле -1ент (замедлительный 1шапан), гфоггускаюлшй поток рабочей жгодкости в однсь. нагфавлезши без сотфстгквления и зтшчктельно дросселирующий его в обратном нйщзаЕленш. Устройство работаем следующим образе. Когда сигналы py tiHuro и автоматическсго управления отсутствутют (рулевое колесои копирующие щупы не изменяют свое положение), рабочая квдкос1ъ, подаваемая насосом 19, последо вательно проходит через распределитель 2 н 6 н сштается в маслобак 18, дегсь, насос 18, трубопровод 22, распредепитеш 2, трубопровод 23, распредешетель 6, трубопровод 24 с дросселем 30, фильтр 21. При этом, давление, которое создается на распределителе 6 трубопроводе 24 и дросс 31е 30, передается через отвод 17 в полость одностороннего .п-Щроцйлщдра 16, шток этого шшиндра 1:фКНШ1.шет вал телескопической Tsmi к вну еаней поверхности трубы телескопа И за счет сзот трешш жестко фгагсирует последние от нх взаимного перемещения. Необходимое для этого давлеине может быть попучено путем соответствующего выбора щзосселя ЗО. Таким образом, следящая система оказьгаается подгютовленной к работе в автоматическом рехшме. При отклонеши мащины от направления колируюхщге щупы 9 начинают перемещаться в поперечном направле1ШИ. Эти перемещения через рьгчаг 10, тягу 11 и двуплечий рычаг 12 передаются на золотник распределителя 6, Золотмск смещается относительно корпуса, рабочпя жидкость из нагнетательной полости распре-, деэтителя 6 направляется в ОДЕШ из его отводов н, свободно проходя через клапан-дроссель S, поступает к переключаю щему блоку 7, naiip iMep, по трубопроводу 25. Если рулевое колесо ручного управления 1 в это время неподвгокно, то так как распредлитель 2 вьшолнен с положительным перекрытием (закрытыми отводами при нейтраш ном положешш золотника), жидкость из пачости 31 пере- клюггающего блока проходит в полость 33 и далее через трубопровод 27 в штоковую папость гидроцкгаавдра 4. Начинается поворот управляемых колес 5 вправо. При этом вытесняемая из противоположной (беоштоковой) полости ж щкослъ не возвращается к распределителю 6, а 1ЕШ11равяяется в маслобак 18 через иере ключаюншй блок 7 по цепи; трубсяровод 28 - полосга 34 и 35 переключаюшегч бпока - трубопровод 29. Поворот управляегушзх колес 5 влево в ренолме автовождения происходит акапо1 кч ным грбразом. Жэщкость подает.ся через трубсвпровод 26 к полости 32 блока 7. Потом перемвцаются шары 37 вверх и, проходя ИЗ полости 32 в полость 34, далее подается к гщфоштиадру 4 но -тру бопроводу 28. Вытесняемый нз штоко.вой псиости этого гщфоШЕЛйндра объем сяиае ется в маслобак 18, через трубо провод 27 н соединенные в новом Сверх нем) повхоженни шаров полости 33 к 35. Так как во время автоматического поворота копес давление в нагнетающей полости распредащггеля 6 по1вышается (нв обходамо щгеодопевать сойроукшхенке по ворогу) то части 14 и 15 тепёскопкческой ТЯГЕ ае бодее -надейшо (|шж:сйру ются, что обоспе1 ква€гт чеа-кую тработку обратной связи; ДБ);скение управляемых кс5пес при повороте передается корпусу распредпаггегтя 6 сюй$юйнр к без тофгоб в результате корпус к збпотвж вновь занимает нейтральное положение н яойо рот колес Щекрашается. Поеяе окончания переходного процесса мшшна выходйт на необходимую,траекторию, так как люфты к друше нелинейности в этом устройстве сведены к минимуму, то при соответсгвук щем выборе плеч рычагов саедягаей сйотемы вооможно осуществлять оптимапъ ное автома-гаческое управление, т.е. улра «einie с минимальной ошибкой вождения. Наоборот, при ругюом управпенин час ти 14 и 15 телескопической тягк автО матически расфиксирукугся. Это Ерсясхошп- потому, что во- время поворота руяев го колеса ручзюго управления 1 поток от 9 126 распредешггеля 2 направляется к гидрошоппэдру 4 ynpaBHHeivibix колес 5, а клапа шая система опять переключает слив рабочей жзщкости после гидрощшиндра 4 непосредственно в маслобак 18, прекращая, тагагм образом, в эти моменты времени движение поаюка через распределитель 6. Поэтому давление в отводе 17 быстро падает до нуля, поджатие одноci opoHHjJM гидрошшнндром 16 вала становится незЕшчительньп-л н части телескопической тяги свободно перемещаются друг относительно друга, обеспечивая независЕМые перемещения управляемых колес ,. и кошфукяцих щупов. Например, при повсроте рулевого колеса ручного -правления 1 влево одновременно происходит смещение золотасика расзтредеянтахя 2 и поворот насоса-дозатора 3. Пoзтo y поток от насоса 19, Грроходя через распредлитепь 2 в дозатор 3, направляется в трубопровод 26. Далее, незавкамо от того в каком сосгошвш находится распредиштепь 6, следящей системы, осуиесгвлнетсй 1фИoptiTeTHoe ручное угфаБлекие (т.е. автоматическое уиравленне колес 5 прекрашается н начщнает отрабатываться в первую очередь сйгиал ручного уяравления, так 1сак рзспредпш ель 2 распояожен первым по летанию-в иосиедсжатеиьной цепи, а пет)екшоча1 шшй блок 7 направляет весь поток после отрабсягки непосредственно в маслобак 18, респредапитепь 6 авто- . матнчесщ ирн ручном утфвЕленин обесточивается. Таким образом, кз трубопровода 26 5{щдкость поступает в пспость, 33. блока 7, Движению жгздкости дапее к распредеюггелю 6 прешттгвует кпапан1фоссель 8 (эти клапаш 1.нак а гкт:11 дггя разгфмеожзашш эашшутык объемов трубопроводов 25 S 26, обеспеч:№ая тем caMbnvj возможнооть надеяш«ях перекшочешга Б блоке 7 при любых, даже самых малых, потоках моздкостк), .Поэтсялу жнпкость под напором пракодит из полости 32 в полость 34, перемещая шары 37 нверх, ecjttJ онк до этого находились в HHHCiSKi попожешш, и далее в бесштоковую пояостъ пщроципиЕдра 4, колеса 5 поворайшаются влево. Шгфы 37 верхней части блока 7, прижатые потоком через толкатель 36 к седлу иолосга 31, препят ствуют попа,ааншо при этом вытесняемого из пщррщшиндра 4 объема жидкости в распредгштель 2, откуда он мог бы поступгпъ к распредлвтелк 6 следящей системы. Наоборот, поток направляется по трубопроводу 27 через полости 33
к 35 и трубопровод 29 на слзш в маслобак 18. При этсм части 14 к 15 телескопической тяги все время рас4в1кснроБЙ11Ы, так как в трубсшроводе 23 жидкость не нагнетается и давление в отоутствуегг,
П жоротуправляемых колес вгграво в ре изтме ут1р(аш1ения происходит аналогичным образом.
Когда оператор перестает поворачи- вать рулевое колесо, цепь последователь ного питазаня распределителей 2 и 6 воо станавшгвается, создазааемые при движе- чши яовдкости дашлення в наплетающей полости расп| едантеня 6 передаются че рез отвод в одност чюнщ1й гидротсилиндр 16, и чвсти 14 и 15 телескопической
тяги автоматхгчески надежно фиксируются от взаимзюго перемездения.
TaioiM образом, в зоредпагаемом устройстве простая конструкшш тормозного звена, вьшолненного в виде телескопи ческой тяги с автомагшческой фиксацией ее частей, непосредств ЕШО свяаьгоающей управляемые колеса с распределителем следящей системы, позволяет р шашзягъ рычажную систему компактно, с минимальным числом шарниров, и гс ежать люфты. При этом достигается высокое качество управления в автоматическом режиме, когда управляемые колеса с минимальной ошн6кой отспеяшвают движения копирующих щулов, и наиболее простым путем обеспечивается переход к их независимому движению, когда копирующие тупы ограничены в перемешении рядками растений (режим py4iioE коррекции траектории) или фиксаторами яа раме (режимы рушого управлечшя па траис1торгге), а управляемые колеса слаободно пещора- ягоаются в 1гуж1гую сторону оператором чфез уэеп дистшшзгонного ручнотх) управления.
Формула изобретения
Устройство для утфавления самоходной сельскохозяйственной машиной, со- держащ€ е узел диса анздаонного управления и следящую систему автоматического управления с гидрораспределитвлем, который связан с управляемыми колесами посредством системы рычагов, снабже1ш Ьй тормозным звеном, управляемым подродалкндром одностороннего действия, связанным с напорной полостью гидрорас- пределитетя, отличающееся тем, что, с целью повышения точности вонодения машины и упрошения конструкции устройства, тормозное звено вьшолнено в ввде телескопической тяги, наружная часть которой жестко связана с ксфпусом пщрорасгфеделителя, при этом кор пус гидроцншщдра одностороннего действия закрашен на наруишой части телескопической тяги для контактирования штокя хйДроаишндра с внутре1шей частью теле)скопической тяги.
Источники информации, принятые во внимание при экспертизе
1.Авторское скидетепьсгво СССР
6 5263О4,кп, А 01 В 69/04, 1976.
2.Авторское свидетельство СССР Ht 677699, ют.А 01 В 69/04,1979.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления самоходной сельскохозяйственной машиной | 1982 |
|
SU1113011A1 |
| Устройство для управления самоходной сельскохозяйственной машиной | 1977 |
|
SU677699A1 |
| Устройство для управления самоходнойСЕльСКОХОзяйСТВЕННОй МАшиНОй | 1979 |
|
SU852207A1 |
| Устройство для автоматического вождения самоходной сельскохозяйственной машины | 1981 |
|
SU952122A1 |
| Устройство для автоматического направления движения самоходной сельскохозяйственной машины | 1980 |
|
SU948308A1 |
| Устройство управления самоходной сельскохозяйственной машиной | 1989 |
|
SU1676474A1 |
| Устройство управления самоходной сельскохозяйственной машиной | 1985 |
|
SU1287763A1 |
| Устройство для управления самоходной сельскохозяйственной машиной | 1983 |
|
SU1122251A1 |
| Устройство для управления самоходной сельскохозяйственной машиной | 1979 |
|
SU854297A2 |
| Копирующее устройство для автоматического вождения сельскохозяйственной машины по борозде | 1981 |
|
SU959649A1 |