Изобретение относится к области станкостроения, в частности к захватным устройствам для погрузочнор аз груз о чных подъемно-тр анспортных и других технологических операций манипуляторов, применяемых преимущественно в автоматических линиях, обрабатьшающих комплексах и центрах.
Известен захват манипулятора, содержащий корпус, зажимные губки и привод lj .
Недостатком известного манипулятора является невозможность зажима с перехватом и транспортировки составных заготовок в зафиксированные размерами установочные базы зажимных приспособлений из-за отсутствия подвижного звена в захвате, необходимого при досылке пакета заготовок до неподвижной вертикальной базовой губки тисков, прежде чем зажать в них заготовку и затем отпустить захватом.
Цель изобретения - зажим с перехватом и транспортировка составных заготовок.
Цель достигается тем, что захват снабжен упругими элементами, а корпус выполнен из двух частей, соединение между которь1ми выполнено в виде ласточкиного хвоста с зазорами, причем верхняя часть корпуса соединена с приводом и на ней смонтированы упругие элементы, а на нижней части корпуса размещены зажимные губки.
На чертеже изображен предлагаемьй захват, общий вид..
Захват манипулятора содержит корпус, состоящий из двух частей - верхней 1, соединенной со штоком 2 силового цилиндра вертикального перемещения руки манипулятора, и нижней 3, несущей на себе неподвижную 4 и подвижную 5 губки зажима изделия 6. Подвижная губка снабжена рейкой, контактирующей с шестерней, связанной с приводом (не показан). Верхняя часть корпуса соединена с нижней наклонными поверхностями в виде ласточкиного хвоста. На верхней части выполнены охватывающие наклонные 7 и плоские 8 поверхности. На нижней части выполнены охватываемые наклонные 9 и плоские 10 поверхности. Оси симметрии штока и наклонных поверхностей совпадают. Верхняя часть корпуса выполнена с наружными наклонными поверхностями, которые симметричны внутренним. На них жестко закреплены упругие элементы, например пластинчатые пружины 11 и 12. На нижней части корпуса также выполнены симметричные скосы, причем в свободном состоянии эти скосы лежат в плоскости скосов верхней части корпуса. Пружины свободно касаются нижних скосов.
Захват манипулятора работает следующим образом.
При опускании зажатой составной заготовки в тиски зажимных приспособлений нижняя часть 3 корпуса захвата свободно подвешена к верхней 1 .. при помощи самоцентрирующих наклонны поверхностей 7 и 9, а между плоскими поверхностями 8 и 10 зазор максимальньй. Плоские пружины 11 и 12 фиксируют свободное положение составных частей корпуса захвата. При перемещении неподвижные губки 4 захвата ориентируют вертикальную базовую поверхность заготовки относительно неподвижной базовой губки станочных тисков с зазором. Когда заготовка касается горизонтальной базы станочных тисков, шток 2 силового цилиндра вертикального перемещения захвата продолжает движение вниз. При этом сокращается и затем исчезает зазор между рабочими плоскими поверхностями 8 и 10 составных частей корпуса, захвата, а упругие пластинчатые пружины 11 иМ2 проскальзьгоают по на;клонным поверхностям нижней части корпуса и образуют некоторый угол, а боковой заэор между поверхностями 7 и 9 увеличится. Когда усилие прижима заготовки достигнет расчетной величины, отключается вертикальное перемещение штока 2 и включается перемещение подвижной губки тисков станочного приспособления. Оно прекращается при достижении расчетной величины усилия зажима изделия. При этом заготовка (пакет) досылается донеподвижной базовой трубки тисков нижняя часть корпуса смещается относительно верхней, а зазор, ранее равномерный с двух сторон, становится неравномерным. В результате бокового смещения пружина 11 увеличивает угол сгиба, а пружина 12 распрямляется. После достижения расчетного усилия зажима тисков подается команда на разжим губок захвата, и под действи311442934
ем пружины 11 составные части корпуса щение в исходное положение. Съем загбвновь самоцентрируются, в это время товок аналогичен, происходит в обзахвat получает вертикальное переме- ратном порядке.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля профиля пера заготовки турбинной лопатки | 1989 |
|
SU1620809A1 |
| Зажимное устройство с самоцентрирующимся механизмом | 2021 |
|
RU2773979C1 |
| ГИБКИЙ ПРОИЗВОДСТВЕННЫЙ МОДУЛЬ | 1989 |
|
RU2014201C1 |
| Наладка тисков | 1989 |
|
SU1703442A1 |
| Самоцентрирующие тиски | 1981 |
|
SU1025499A1 |
| Клещевая подача для универсально-гибочных автоматов с приводом от центральной шестерни | 1987 |
|
SU1547916A1 |
| Самоцентрирующие тиски | 1991 |
|
SU1796436A1 |
| ТОКАРНЫЙ СТАНОК | 2012 |
|
RU2494840C1 |
| УСТРОЙСТВО ДЛЯ КРЕПЛЕНИЯ ОПТИЧЕСКОГО ПРИЦЕЛА НА ОРУЖИИ И СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ | 2001 |
|
RU2199073C1 |
| Загрузочное устройство | 1982 |
|
SU1085754A1 |
ЗАХВАТ МАНРШУЛЯТОРА, содержащий корпус, зажимные губки и привод, отличающийся тем, что, с целью расширения технологических возможностей, он снабжен упругими элементами, а корпус выполнен из двух частей, соединение между которыми выполнено в виде ласточкина хвоста с зазорами, причем верхняя часть корпуса соединена с приводом и на ней смонтированы упругие элементы, а на нижней части корпуса размещены зажимные губки. $5 (Л ff 4: 4iik ГС со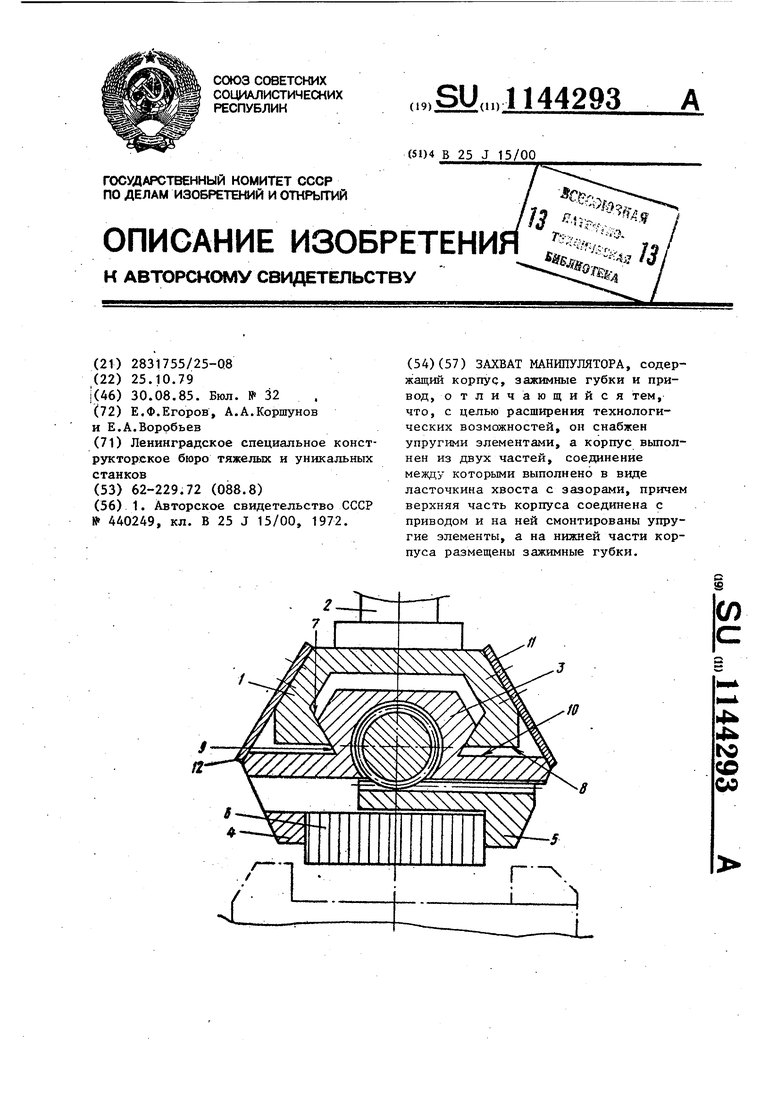
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Захват | 1972 |
|
SU440249A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
