Изобретение относится к землеро ным машинам, а конкретнее к шагающим экскаваторам. По основному авт. св. № 829821 известен механизм шагания экскаватора , содержащий кривошипы с опора ми j которые шарнирно связаны с лыжами и на которых закреплены кронштейны с двумя наклонными стойками с соосными отверстиями в них, а оп ры снабжены шарнирно связанными с ней подпружиненными ползунами, установленными с возможностью пере щения в отверстиях стоек lj . Недостатком указанного устройст ва является снижение маневренности на разных грунтовых основаниях изза одинаковой постоянной величины перемещения лыж относительно базыэкскаватора. Цель изобретения - повышение маневренности и проходимости экска ватора. Поставленная цель достигается тем, что механизм шагания экскаватора снабжен силовым цилиндром, корпус которого закреплен на кронштейне, а шток связан с концом под пружиненного ползуна. На чертеже изображен механизм шагания экскаватора, вид сбоку. Механизм шагания экскаватора содержит кривошип 1, опору 2, лыжу 3, кронштейн 4, ползун 5, силовой цилиндр 6. Опора 2 шарнирно св зана с ползуном 5, который подвижно и с возможностью продольного перемещения установлен в отверстиях стоек 7 и 8 кронштейна 4, подви но связанного с лыжей 3. На ползуне установлены пружины 9-11, посредством которых опора 2 взаимодействует со стойками 7 и 8. Соосн с наклонно расположенньЕМ ползуном 5 установлен силовой цилиндр 6 двустороннего действия, корпус которого жестко скреплен со стойкой 7, а шток соединен с торцевой частью ползуна. Силовой ци«тийдр 6 свя зан с гидросистемой (или пневмосис темой) экскаватора при помо1щ золо НИКОВ 12 и 13 „ управляемых операто ром с пульта. Механизм шагания работает следующим образом. При шагании экскаватора по срав нительно твердой опорной поверхности обе полости силового цилиндра 6 сообщают при помощи золотников 12 и 13 со сливной магистралью, и цилиндр не препятствует перемещению ползуна 5 в стойках 7 и 8, при котором ползун в случае возникновения нежелательных нагрузок, например при пробуксовке лыжи в момент отрыва ее от опорной поверхности, имеет возможность гасить посредством пружин 9-11 ударные нагрузки. При шагании экскаватора по неплотной опорной поверхности, когда увеличивается вдавливание каждой лыжи и уменьшается от этого высота подъема экскаватора и длина шага, до опускания лыжи штоковую полость цилиндра 6 при помощи золотника 13 соединяют с источником сжатого рабочего тела, под действием которого кронштейн 4 стойкой 7 приближается к опоре 2. Поскольку опора 2 при этом неподвижна, а стойка 7 Bbmie, чем стойка 8, перемещение кронштейна 4 и лыжи 3 происходит со снижением последней, при этом уменьшается высота нахождения лыжи от поверхности грунта, что при опирании последней способствует компенсации глубины ее продавливания в грунт, а следовательно , увеличению подъема экскаватора и улучшению шагания в этих условиях. По окончании .шагания, когда при опирании экскаватора на неплотную опорную поверхность нужно увеличить высоту подъема лыж для уменьшения задевания ее о поверхность грунта при экскавации или повороте экскаватора, штоковую полость цилиндра 6 при помощи золотника 13 сообщают с магистралью низкого давления, а поршневую полость при помощи золотника 12 - с нагнетательной. При этом происходит перемещение корпуса цилиндра 6 и лыжи 3 с кронштейном 4, при котором последний более низкой стойкой 8 приближается к onopie 2, к которой через ползун 5 подвешена лыжа 3, последняя находится в более высоком положении на наклонно расположенном ползуне 5, что уменьшает ее задевание за поверхность при продавливании экскаватора опорной базой 311450 j условиях работы на слабых грунта5. Таким образом, за счет связи элементов цилиндра с кронштейном лыжи и наклонно расположенным к ней ползуном опоры обеспечивается управляемое изменение высоты положения лыжи относительно опоры с фиксацией ползуна и кронштейна в заданном положении, а при шагании по твердой опорной поверхности - восстановле974ние амортизации между опорой и лыжей. Использование изобретения позволяет повысить маневренность, надежность и производительность шагающих экскаваторов, в частности проходимость экскаватора путем независимого изменения положения каждой лыжи по высоте относительно опорной базы экскаватора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм шагания экскаватора | 1982 |
|
SU1086087A1 |
| Механизм шагания экскаватора | 1982 |
|
SU1167277A1 |
| Механизм шагания экскаваторов | 1974 |
|
SU631610A1 |
| Шагающий механизм к самоходной повозке | 1955 |
|
SU112203A1 |
| ШАГАЮЩЕЕ ХОДОВОЕ ОБОРУДОВАНИЕ | 1993 |
|
RU2034963C1 |
| Шагающее устройство землеройной машины | 1983 |
|
SU1121365A1 |
| Шагающий болотный тягач | 2022 |
|
RU2779001C1 |
| ВОЕННАЯ ГУСЕНИЧНАЯ МАШИНА С ПОВЫШЕННОЙ ПРОХОДИМОСТЬЮ НА СЛАБЫХ ГРУНТАХ | 2016 |
|
RU2653407C1 |
| Шагающий болотоход | 2022 |
|
RU2792148C1 |
| Механизм шагания экскаватора-драглайна | 1990 |
|
SU1735509A1 |
МЕХАНИЗМ ШАГАНИЯ ЭКСКАВАТОРА по авт. св. № 829821, отличающийся тем, что, с целью повышения маневренности и проходимости, он снабжен силовым цилиндром, корпус которого закреплен на кронштейне, а шток связан с концом подпружиненного ползуна. i 4 СП СО 41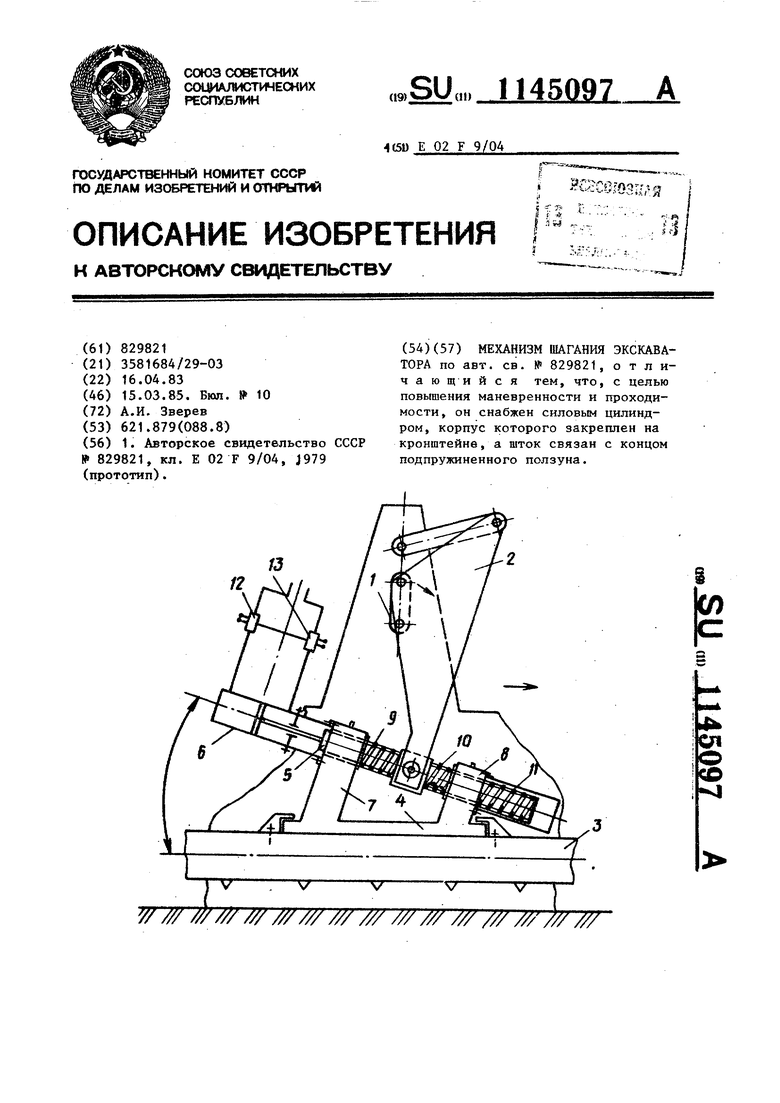
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Механизм шагания экскаватора | 1979 |
|
SU829821A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
