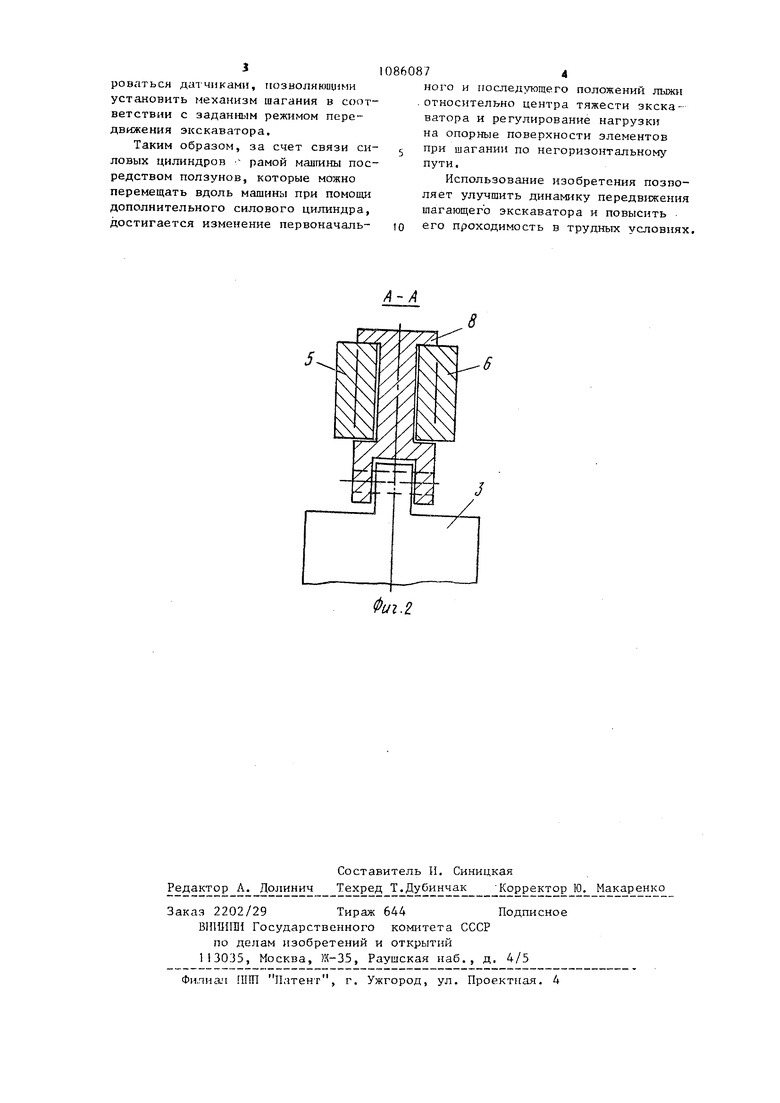
Изобретение относится к землеройной технике, в частности к механизмам шагания экскаваторов. Известен механизм шагания экскаватора, содержащий силовые цилиндры; которые верхним концом прикреплены к раме машины, а нижниь шарнирно связаны с опорными льрками Cl. Недостатком данного механизма является то, что он не удовлетворяет условиям передвижения экскаватора по неровному пути. Наиболее близким техническим решением к изобретению является механизм шагания экскаватора, содержащий лыжу шарнирно связанную с силовыми цилинд рами ее подъема, которые другими кон цами щарнирно соединега. с экскаватором посредством упорного элемента 2 Однако в этом механизме шахания постоянная связь силовых цилиндров с рамой машины не позволяет эффектив но использовать характеристики механизма, что отрицательно сказывается на стабильности ходовь Х качеств экскаватора в условиях негоризонтапьной поверхности пути передвг-жения, Так, при шагании экскаватора на подъем наклон приводит к повышенному смещению центра тяжести машинь в сторону стрелы, что увеличивает сопротивление с грунтом скользящей части рамы и снижает на лыжах, способствуя из пробуксовке. Цель изобрете1-шя - повь;шение проходимости экскаватора. Указанная цель достигается тем, что в механизме ьчагания экскаватора содержащем лыжу лиарнионо связанную С силовыми цилиндрами ее подъема, которые щарнирно соедошены через упорный элемент с экскаватором, механизм шагания снабжен дополнител ным силовым цилиндром и связанными ;с его щтоком ползунами, соединенными между собой посредством жесткой тяги, при этом упорный элемент выпо нен в виде горизонтально расположен ной направляющей, в которой установ дены ползуны, связанные шарнирно с силовыми цилиндрами подъема лм«Ии а ось дополнительного силового цилиндра и ось направляющей расположены на одной прямой линии. На фиг. 1 изображен механизм шагания экскаватора; на фиг. 2 разрез А-А на фиг. 1. Механизм шагания содержит опорную пыжу 1; силовые цилиндры 2, 3 и дополнительный силовой цилиндр 4, направляющие 5 н 6 и ползуны 7 и 8. Силовые цилиндры 2 и 3 верхним концом шарнирно соединены с ползунами 7 и 8, которые соединены между собой жесткой тягой 9 и со штоком 10 дополнительного силово1о цилиндра Af прикрепленного к раме 11, опирающуюся на раму 2 машины. Направляющие 5 и 6 расположены горизонтально и прикреплены жестко к раме 1 машины, а ползунь 7 и 8 установлены в направляющих подвижно и с возможностью их перемещения при воздействии штока силового цилиндра 4, ось которого расположена соосно с ползунами и на одной прямой с осью направляющей. Механизм шагания работает следуюш)лм образом. При передвшкении экскаватора в неблагоприятных условиях, например на подъем при поднятой лыже 1, включают силовой цилиндр 4, который перемещает ползуны 7 и 8 по направляющим 5 и 6 вперед. При этом вместе с ползунами 7 и 8 вперед перемещаются силовые цилиндры 2 и 3 и льока , а ось О опоры механизма шагания окажетсяближе к центру тяжести G машины (который находится впереди от оси механизма шагання), При выдвижении лыжи 1 посредством силовых цилиндров 2 и 3 с опусканием на грунт меньшее удаление оси механизма шагания от центра тяжести машины обеспечивает перераспределение веса машины между опорными частями, снижение действия центра тяжести в сторону стрель машины и усиление давления на лыжу Это уменьшает сопротивление перемещению рамы и повьшает сопротивление проскальзыванию лыжи. На перемещение поднятой машины оказывает влияние повышеннь Й момент от действия масс относительно сместившейся оси опоры механизма шагания, облегчающий перемещение машины по поднимающейся трассе После окончания передвижения экскаватора ползуны 7 и 8 при помо;н силового цилиндра А могут быть возвращены в первоначальное положение ли в положение, соответствующее арактеру передвижения Причем полоение ползунов 7 и 8 может контролировлться датчиками, позволяюи ими установить механизм шагания в соответствии с заданным режимом передвижения экскаватора.
Таким образом, за счет связи снловых UHJTiiHApoB - рамой малтины посредством ползунов, которые можно перемещать вдоль машины при помощи дополнительного силового цилиндра, достигается изменение первоначаль860874
ного и последующего положений лыжи .относительно центра тяжести экскаватора и регулирование нагрузки на опорные поверхности элементов при шагании по негоризонтальному пути.
Использование изобретения позволяет улучшить динамику передвижения шагающего экскаватора и повысить 10 его проходимость в трудных условиях.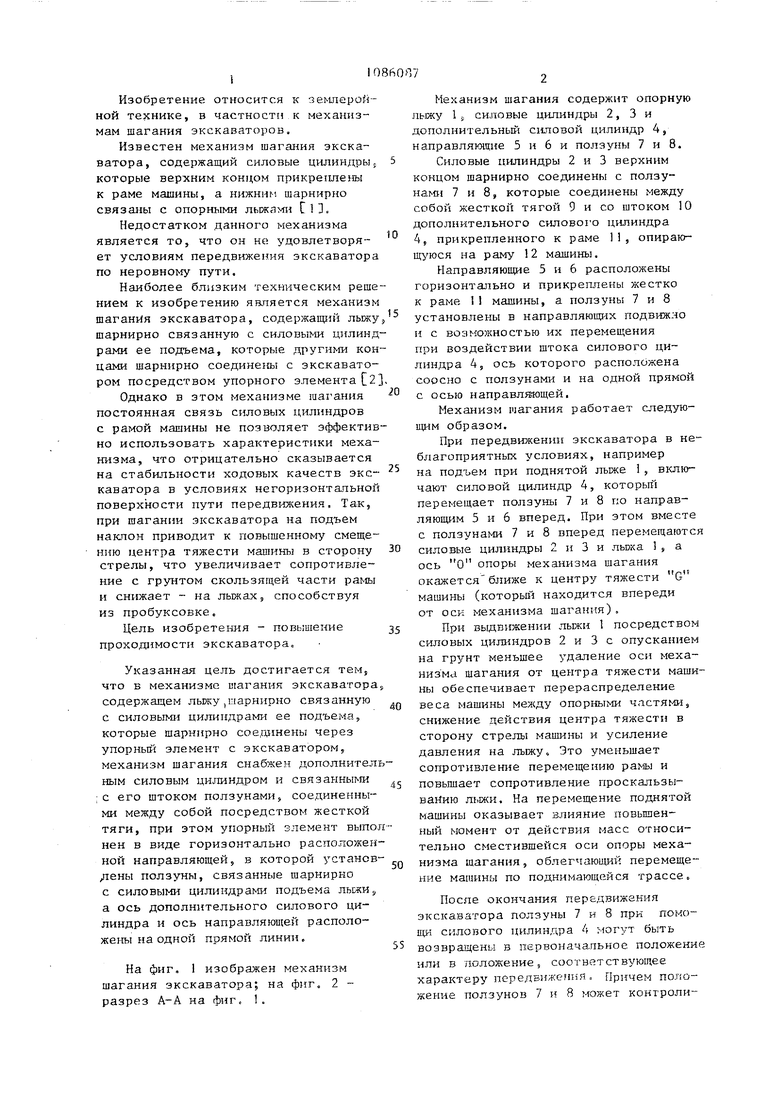
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм шагания экскаватора | 1980 |
|
SU899802A1 |
| Шагающее устройство землеройной машины | 1983 |
|
SU1121365A1 |
| Механизм шагания экскаваторов | 1974 |
|
SU631610A1 |
| Механизм шагания экскаватора | 1979 |
|
SU825806A1 |
| Механизм шагания экскаватора | 1983 |
|
SU1145097A2 |
| Механизм шагания экскаватора | 1982 |
|
SU1167277A1 |
| Механизм шагания шнекобуровой машины | 1981 |
|
SU989056A1 |
| ХОДОВОЙ МЕХАНИЗМ ТЯЖЕЛЫХ МАШИН | 1967 |
|
SU222983A1 |
| Гидравлический механизм шагания экскаватора | 1983 |
|
SU1074973A1 |
| Механизм шагания экскаватора | 1979 |
|
SU829821A1 |
МЕХАНИЗМ ИАГАНИЯ ЭКСК/.ВАТОРА, содержащий лыжу, шарннрно связанную с силовыми цилиндрами ее подъема, которые шарнирно соединены через упорный элемент с экскаватоотличающий ся тем. ром, что, с целью повышения проходимости экскаватора, механизм шагания снабжен дополнительным силовым цилиндром и связанными с его штоком ползунами, соединенными между собой посредством жесткой тяги, при этом упорный элемент выполнен в виде горизонтально расположенной направляющей, в которой установлены ползуны, связанные шарнирно с силовыьш цилиндрами подъема лыжи, а ось дополнительного силового цилиндра и ось направляющей расположены на одной прямой линии. с о 00 CD о 00 vj Г2 Ь г./
S
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| МЕХАНИЗМ ШАГАНИЯ | 0 |
|
SU217280A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
