Фиг. I
Изобретение относится к землеройным машинам, в частности к экскаваторам-драглайнам с шагающим ходовым оборудованием.
Известен экскаватор-драглайн с шагающим ходовым оборудованием, перемещение которого происходит с неполным отрывом узла опирания от поверхности грунта, имеющим две расположенные симметрично относительно поворотной платформы и связанные с ней опорные лыжи, а также обеспечивающий шагание механизм.
Известно также шагающее устройство, включающее опорную раму, связанную посредством кольцевого рельса, катков и полой цапфы с верхним строением экскаватора, опорные лыжи с приводом и дополнительную опору в виде ряда пневмо- колес, контактирующую с грунтом при перемещении.
Наиболее близким техническим решением к изобретению является механизм шагания экскаватора-драглайна, включающий опорный узел в виде диска, нижняя часть которого выполнена по форме усеченного конуса с обечайкой по окружности. Внутри диска имеются примыкающие к обечайке, снабженные равномерно расположенными сквозными отверстиями изолированные секции. Каждая секция посредством радиального воздуховода может быть соединена с воздушным резервуаром, включенным в питаемую от компрессора пневмосистему экскаватора.
Недостатком этого механизма является необходимость увеличения производительности компрессорной станции, усложнение пневмосистемы экскаватора и зависимость эффективности воздушный смазки от состояния поверхности грунта.
Цель изобретения - упрощение конструкции и снижение энергоемкости перемещения путем уменьшения сопротивления движению.
Эта цель достигается за счет того, что узел опирания имеет радиально расположенные опорные элементы, каждый из которых выполнен из закрепленной снизу диска опорной площадки с боковыми направляющими и из расположенной в направляющих с возможностью перемещения подпружиненной плиты скольжения, выполненной по форме трехгранной призмы, верхняя грань которой расположена с возможностью взаимодействия с опорной площадкой. Кроме того, опорная площадка имеет продольный паз, а плита скольжения - упор, связанный с обечайкой посредством расположенной в пазу пружины, причем сопрягаемая с плитой скольжения поверхность опорной площадки имеет антифрикционное покрытие, например типа Нафтлен.
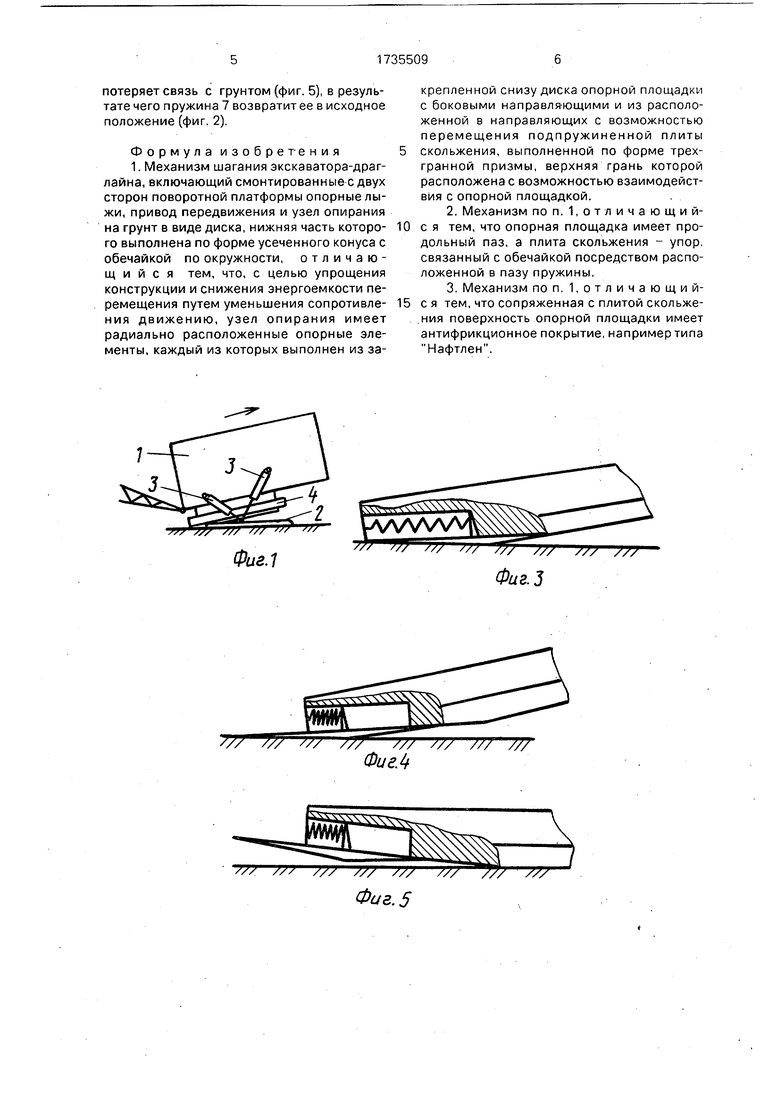
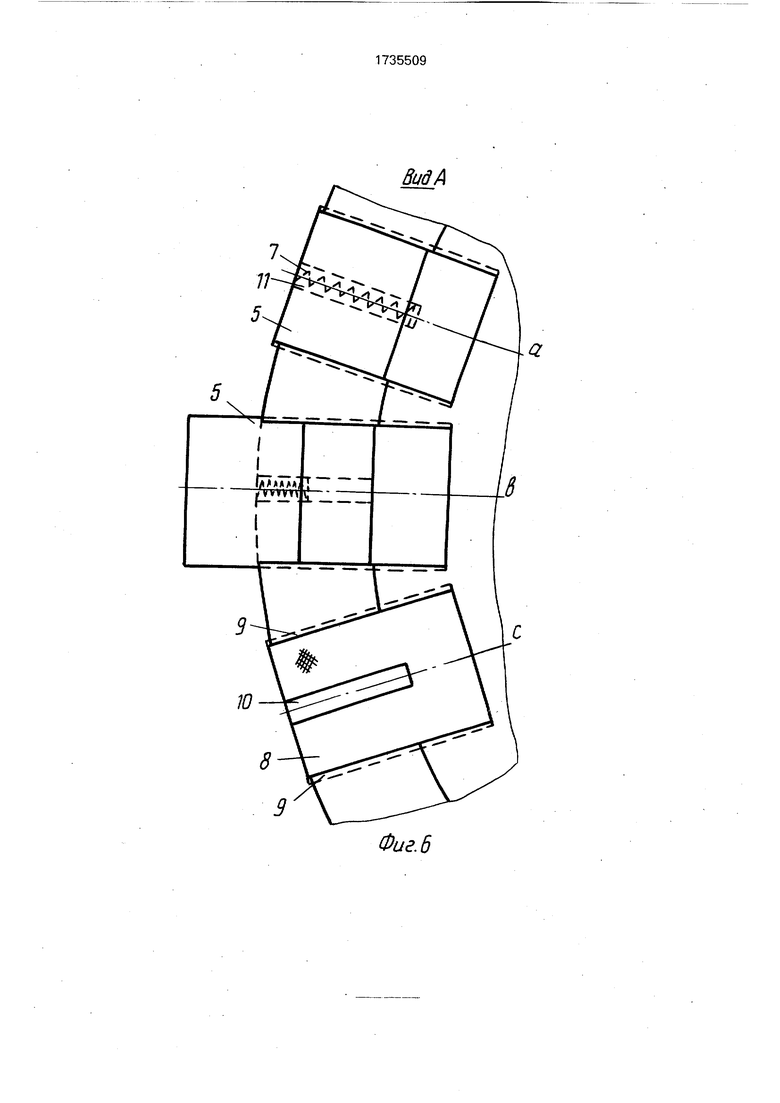
На фиг. 1 показана схема экскаватора- драглайна в процессе шагания на этапе волечения задней кромки узла опирания; на фиг. 2-5 - последовательные положения плиты скольжения на различных этапах шагания; на фиг. 6 - диск узла опирания с плитой скольжения в исходном положении
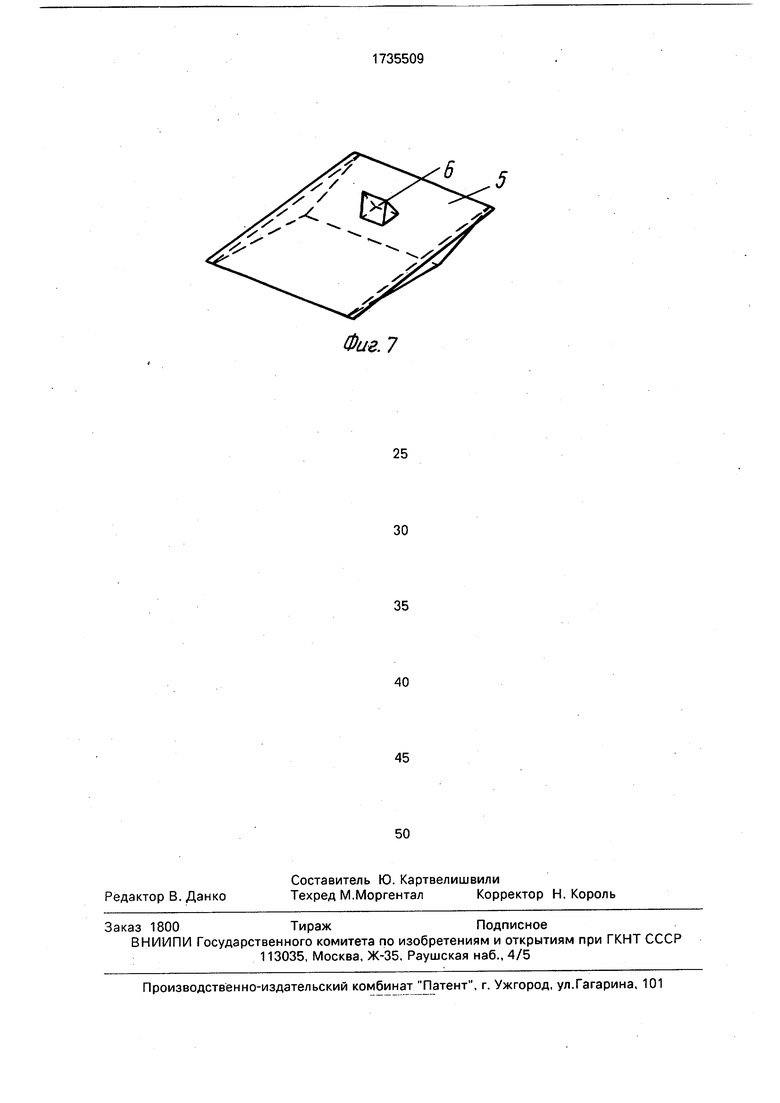
0 (а), сдвинутой относительно опорного диска (в) и площадка с пазом для пружины, имеющая антифрикционное покрытие, при снятой плите скольжения (с); на фиг. 7 - плита скольжения с упором для пружины.
5Механизм шагания экскаватора-драглайна содержит смонтированные с двух сторон поворотной платформы 1 опорные лыжи 2, привод 3 передвижения, опорный узел в виде диска 4, нижняя часть которого выпол0 нена по форме усеченного конуса с обечайкой по окружности. По периферии опорного диска равномерно расположены плиты 5 скольжения, каждая из которых представляет треугольную призму с упором 6 для пру5 жины 7. Верхняя грань плиты скольжения сопряжена с соответствующей радиально расположенной площадкой 8 опорного диска, армированной антифрикционным покрытием типа Нафтлен, с возможностью
0 перемещения в направляющих 9 вдоль площадки, имеющей продольный паз 10, в котором размещена пружина, установленная между упором плиты скольжения и обечайкой 11 опорного диска.
5Передвижение экскаватора-драглайна
осуществляется следующим образом.
Опорные лыжи 2 выдвигаются приводом 3 передвижения вперед относительно ориентированной соответствующим обра0 зом платформы 1, после чего происходит подъем опорного диска 4 с неполным отрывом его от поверхности грунта - экскаватор- драглайн получает крен. Затем следует подтягивание узла опирания к выставлен5 ным вперед лыжам. При этом с грунтом контактирует одна из плит 5 скольжения.
Ввиду того, что коэффициент трения скольжения пары металл - антифрикционное покрытие типа Нафтлен // 0,0150 0,095 на порядок меньше коэффициента трения пары металл-грунт, происходит соскальзывание задней кромки опорного диска 4 с плиты 5 скольжения, контактирующей с ним посредством площадки 8. При этом
5 пружина 7, установлзнная между упором 6 плиты скольжения и обечайкой 11 диска, сжимается (фиг. 4). После того, как в процессе шагания опорный диск 4, а вместе с ним и экскаватор-драглайн вновь примут горизонтальное положение плита 5 скольжения
потеряет связь с грунтом (фиг. 5), в результате чего пружина 7 возвратит ее в исходное положение (фиг. 2).
Формула изобретения 1. Механизм шагания экскаватора-драглайна, включающий смонтированные с двух сторон поворотной платформы опорные лыжи, привод передвижения и узел опирания на грунт в виде диска, нижняя часть которо го выполнена по форме усеченного конуса с обечайкой по окружности, отличающийся тем, что, с целью упрощения конструкции и снижения энергоемкости перемещения путем уменьшения сопротивления движению, узел опирания имеет радиально расположенные опорные элементы, каждый из которых выполнен из за-
крепленной снизу диска опорной площадки с боковыми направляющими и из расположенной в направляющих с возможностью перемещения подпружиненной плиты скольжения, выполненной по форме трехгранной призмы, верхняя грань которой расположена с возможностью взаимодействия с опорной площадкой.
2.Механизм по п. 1,отличающий- 10 с я тем, что опорная площадка имеет продольный паз, а плита скольжения - упор, связанный с обечайкой посредством расположенной в пазу пружины.
3.Механизм поп. 1,отличающий- 15 с я тем, что сопряженная с плитой скольжения поверхность опорной площадки имеет антифрикционное покрытие, например типа Нафтлен.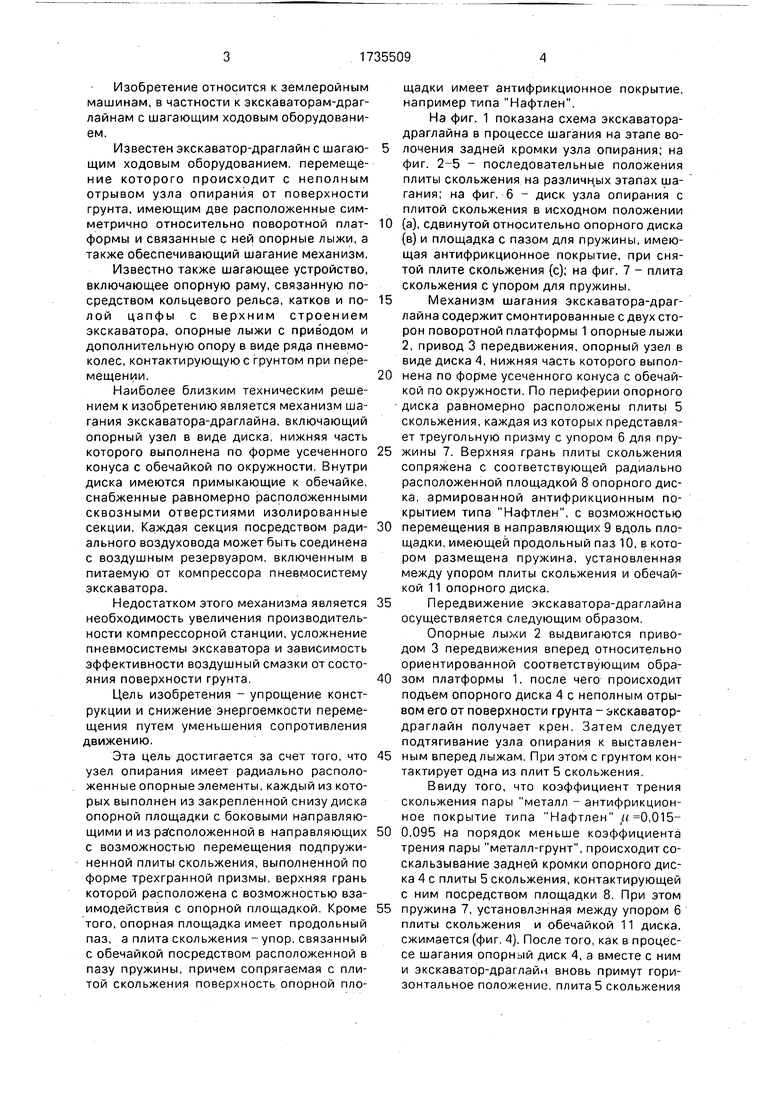
| название | год | авторы | номер документа |
|---|---|---|---|
| ШАГАЮЩЕЕ ХОДОВОЕ ОБОРУДОВАНИЕ | 1993 |
|
RU2034963C1 |
| Гидравлический механизм шагания экскаватора | 1983 |
|
SU1074973A1 |
| Механизм шагания экскаватора-драглайна | 1985 |
|
SU1411396A1 |
| Переносное колейное покрытие автомобильной дороги | 1989 |
|
SU1728324A1 |
| Опорное устройство ходового механизма | 1979 |
|
SU861507A1 |
| Механизм шагания экскаватора | 1979 |
|
SU825806A1 |
| Шагающее ходовое оборудование | 1979 |
|
SU899801A1 |
| Механизм шагания экскаватора | 1983 |
|
SU1145097A2 |
| Опорно-поворотное устройство экскаватора | 1981 |
|
SU1116130A1 |
| Опорное устройство шагающего механизма | 1982 |
|
SU1084386A1 |
Сущность изобретения: механизм шагания содержит расположенный ниже поворотной платформы опорный диск 4, нижняя часть которого выполнена по форме усеченного конуса с обечайкой по окружности, а по его периферии расположены плиты скольжения 5. Каждая плита 5 выполнена по форме треугольной призмы с упором 6 для пружины 7. Верхняя грань плиты 5 сопряжена с радиально расположенной площадкой опорного диска 4. Площадка 8 армирована антифрикционным покрытием и имеет продольный паз, в котором расположена пружина 7. При работе после выдвижения лыж вперед подтягивается по грунту корпус экскаватора с опорой на диск 4 и одну из плит скольжения 5. Плита скольжения 5 перемещается в направляющих относительно диска 4, сжимая пружину 7. При подъеме опорного диска 4 пружина 7 возвращает плиту 5 в исходное положение. 2 з.п.ф-лы, 7 ил. СО С
Фиг.1
/7/ /// 77/ 77/
Фие.4
Вид А
Фиг. 6
Фиг. 7
| Подэрни Р.Ю | |||
| Горные машины и автоматизированные комплексы для открытых работ | |||
| М.: Недра, 1979, с | |||
| Железнодорожный снегоочиститель | 1920 |
|
SU264A1 |
| Механизм шагания экскаватора-драглайна | 1985 |
|
SU1411396A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
