Изобретение относится к исполнительным органам промышленных роботов и манипуляторов, применяемых во всех областях народного хозяйства.
Известна рука робота, содержащая стержень, на одном конце которого размещено захватывающее устройство, дополнительную подвижную опору в виде силового цилиндра и разгрузочное устройство 1.
Недостатками известного устройства являются низкая грузоподъемность и сложность конструкции.
Цель изобретения - увеличение нагрузочной способности, улучшение динамических характеристик, упрощение конструкции.
Цель достигается тем, что в руке робота, содержащей стержень, на одном конце которого размещено захватывающее устройство, дополнительную подвижную опору, привод в виде силового цилиндра и разгрузочное устройство, корпус привода силового цилиндра снабжен дополнительной продольной направляющей, установленной параллельно оси корпуса силового цилиндра, а разгрузочное устройство выполнено в виде Г-образного рычага, меньшая полка которого смонтирована непосредственно на
захватывающем устройстве, а большая полка установлена с возможностью перемещения вдоль направляющей силового цилиндра.
На чертеже изображено предлагаемое устройство.
Рука робота содержит стержень 1, являющийся штоком пневмоцилиндра 2, на конце которого размещено захватывающее устройство 3, разгрузочное устройство, Выполненное в виде Г-образного рычага 4. Меньшая полка 5 рычага 4 смонтирована непосредственно на захвате 3, а большая полка 6 снабжена втулкой 7 и установлена с возможностью перемещения по направяющей 8, на конце которой установлен, проивовес 9.
Устройство работает следующим образом.
Стержень 1, удерживаю ций захватывающее устройство, при помощи пневмоцилиндра 2 перемещают в крайнее левое положение, захватывают деталь (не показана) и перемещают ее вправо, сбрасывая в подставленнун емкость. Далее цикл повторяется.
Изобретение позволяет устранить консольность руки и увеличить ее грузоподъемность.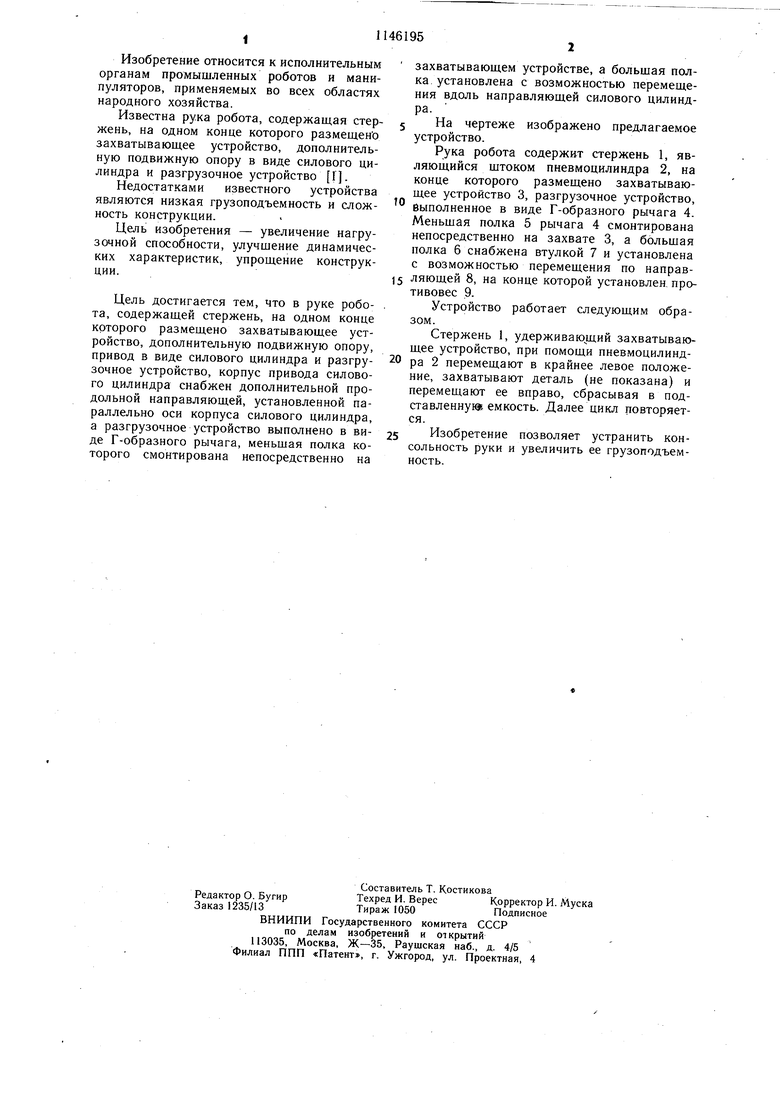
| название | год | авторы | номер документа |
|---|---|---|---|
| Рука робота | 1986 |
|
SU1313693A1 |
| Автоматизированный комплекс для листовой штамповки | 1979 |
|
SU774722A1 |
| Рука робота | 1985 |
|
SU1306709A1 |
| Автоматическая линия штамповки лезвий стрельчатых лап | 1984 |
|
SU1255263A1 |
| Промышленный робот | 1982 |
|
SU1186077A3 |
| Автоматическая линия штамповки изделий с лезвиями | 1984 |
|
SU1255256A1 |
| Автоматизированный технологический комплекс для прессования изделий из порошков | 1991 |
|
SU1801048A3 |
| УСТРОЙСТВО ДЛЯ ПОГРУЗКИ КИП СПРЕССОВАННОГО ЛЕКАРСТВЕННОГО СЫРЬЯ В КРУПНО-, СРЕДНЕ- И МАЛОТОННАЖНЫЕ КОНТЕЙНЕРЫ | 1999 |
|
RU2150394C1 |
| Промышленный робот | 1985 |
|
SU1268254A1 |
| Манипулятор | 1982 |
|
SU1045992A1 |
РУКА РОБОТА, содержащая стержень, на одном конце которого размещено захватывающее устройство, доролнительную подвижную опору, привод в виде силового цилиндра и разгрузочное устройство, отличающаяся тем, что, с целью увеличения нагрузочной способности, улучщения динамических характеристик и упрощения конструкции, корпус привода силового цилиндра снабжен дополнительной продольной направляющей, установленной параллельно оси корпуса силового цилиид;ра а разгрузочное устройство выполнено в виде Г-образного рычага, меньщая полка которого смонтирована непосредственно на захватывающем устройстве, а больщая полка установлена с возможностью перемещения вдоль направляющей силового цилиндра. 4 а со сд
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР по заявке № 3525656/25-08, кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
