N3
О) 00 Ю
ел
4 Изобретение относится к области автоматизации штамповочных работ. Цель изобретения - повышение надежности в работе. На фиг. 1 показана структурная схема перемещений элементов промышленного робота; на фиг. 2 - разрез А-А на фиг. 1 (схема зажимного устройства); на фиг. 3 - возможная компановка технологического комплекса; на фиг. 4 - вид Б на фиг. 3. Робот к штамповочному прессу содержит станину 1, руку 2, на которой при помощи парнира 3 закреплен двуплечий рычаг 4, на одном конце которого смонтирован захватный орган 5. Другой конец 6 двуплечего рычага 4 подпружинен пружиной 7 к руке 2, на которой расположен датчик 8, взаимодействуюший с концом 6 двуплечего рычага 4. На станине 1 закреплен механизм 9 поворота, имеюший датчики 10 и 11 крайнего положения руки 2 при повороте вокруг вертикальной оси. Датчик 10 выдает сигнал «Рука к прессу, датчик 11 - «Рука от пресса. Привод вертикального перемещения выполнен в виде силового пневмоцилиндра 12, закрепленпого на станине 1. Шток пневмоцилиндра 12 соединен через рычаг 13 с приводным валом 14, который в свою очередь, через механизм 9 поворота соединен с рукой 2. Параллельно приводному валу 14 в станине I установлен в подшинниках 15 скольжения подвижной вал 16, в торцах которого размещены гидродемпферы 17. На рычаге 13 закреплен стопорный цилиндр 18, который через рычажный механизм 19 связан с подвижными вкладышами 20, обхватывающими подвижной вал 16. Датчики 21 и 22, а также датчики 23 и 24 фиксируют соответственно крайние положения приводного и подвижного валов. Система 25 управления снабжена логическим устройством 26, связанным с датчиками 8, 10 и 11. Промышленный робот обслуживает листоштамповочный пресс 27 со штампом 28. Заготовки 29 расположены в кассетах 30 устройства выдачи заготовок, например, многопозиционного магазинного устройства 31. Робот работает следующим образом. По команде от системы 25 управления включаются механизм 9 поворота, силовой нневмоцилиндр 12 и приводной вал 14 приводит в движение руку 2. Рука с двуплечим рычагом 4 перемещается к прессу 27 или от него по заданной программе. Конец 6 двуплечего рычага 4 под действием пружины 7 постоянно поджат к датчику 8. При повороте руки 2 к магазинному устройству 31 система 25 управления по сигналу датчика 11, фиксирующего положение «Рука от пресса, включает силовой пневмоцилиндр 12 и рука 2 с захватным органом 5 опускается в кассету 30 захвата заготовки 29. Захватный орган 5 взаимодействует с заготовкой 29, захватывает ее и поворачивает двуплечий рычаг 4 вокруг шарнира 3. Пружина 7 растягивается, и конец 6 двуплечего рычага 4 выходит из взаимодействия с датчиком 8, который подает сигнал в логическое устройство 26 системы 25 управления. При совокупности сигналов от датчиков 8 и 11 логическое устройство включает стопорный цилиндр 18, который посредством рычажного механизма 19 захватывает подвижными вкладышами 20 подвижной вал 16. Подвижной вал 16 начинает перемещаться совместно с приводным валом 14 и взаимодействует с нижним демпфером 17. Тем самым происходит останов движения руки 2 вниз (сигнал датчика 24). При подъеме руки 2 с заготовкой 29 вверх по сигналу датчика 21 система 25 управления включает стопорный цилиндр 18 и по описанной схеме подвижной вал 16 перемещается вверх, взаимодействуя с верхним демпфером 17. При повороте руки 2 с заготовкой 29 к прессу 27 положение «Рука к прессу фиксирует датчик Ю. Установка заготовки 29 в штамп 28 происходит при опускании руки 2 силовым цилиндром 12, при этом заданная величина опускания определяется датчиком 22. При изменении толщины заготовки 29 или неправильной ее укладке в штамп 28 (заготовка уложена в щтампе с перекосом и упирается на кромку его ручья) рука 2 при опускании захватным органом 5 взаимодействует с заготовкой и поворачивает двуплечий рычаг 4. Датчик 8 подает сигнал в логическое устройство 26. Система 25 управления по совокупности сигналов датчиков 8 и 10 логического устройства 26 подает сигнал на ВЕЯключение силового пневмоцилиндра 12 механизма 9 поворота. Формула изобретения 1. Промышленный робот, содержащий систему управления, установленный в станине рычаг, приводимый в движение в вертикальном направлении от силового цилиндра, руку с захватным органом, смонтированную на приводном валу, механизм торможения рычага и датчики, отличающийся тем, что, с целью повышения надежности в работе, он снабжен логическим устройством запрета. связанным с датчиками, один из датчиков смонтирован на руке, а другие датчики установлены с возможностью взаимодействия с приводным валом, механизм торможения рычага выполнен в виде дополнительного вала, установленного в станине с возможностью перемещения параллельно направлению перемещения приводного вала, демпферов. смонтированных в станине с возможностью взаимодействия с концами дополнительного
вала, и узла зажима, установленного на рычаге с возможностью взаимодействия с дополнительным валом.
2. Робот по п. I, отличающийся тем, что узел зажима выполнен в виде подвижных вкладышей, установленных с возможностью взаимодействия с дополнительным валом, дополнительного силового цилиндра
и рычажного механизма, связывающего силовой цилиндр с подвижными вкладышами. 3. Робот по п. I, отличающийся тем, что он снабжен двуплечим рычагом, шарнирно закрепленным на руке с возможностью взаимодействия одним концом с датчиком, а захватный орган смонтирован на свободном конце друплечего рычага
А -А повернуто
29
S
-30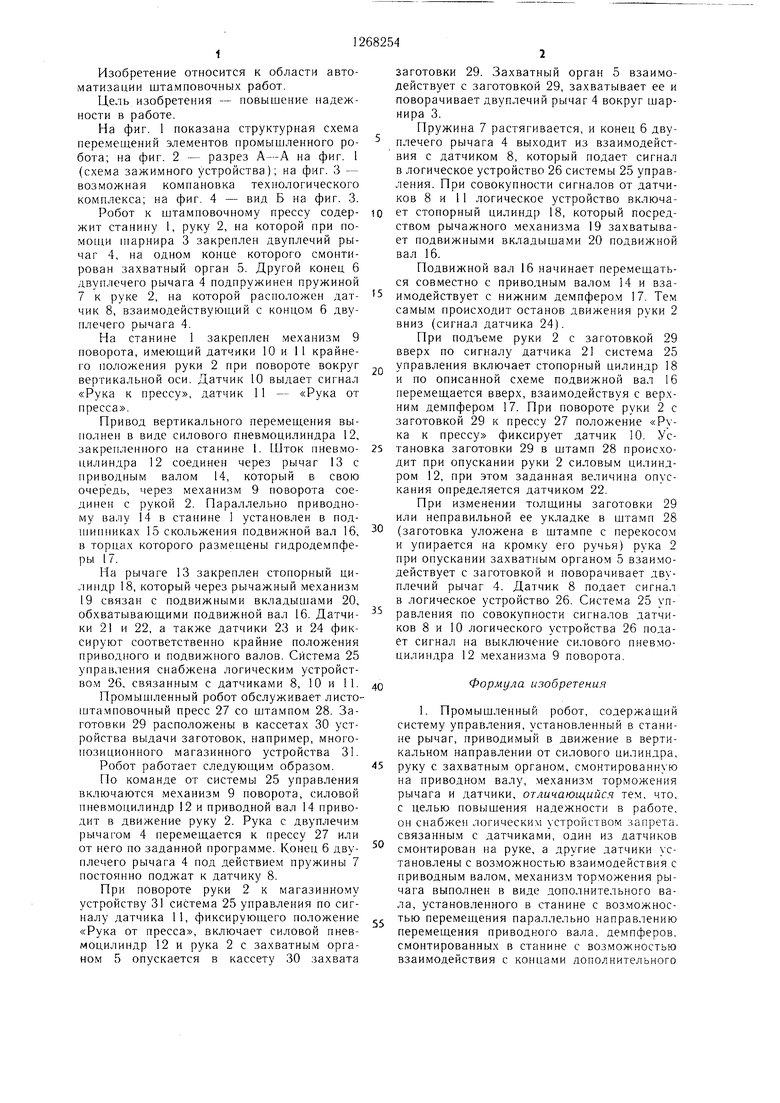
| название | год | авторы | номер документа |
|---|---|---|---|
| Робот к листоштамповочному прессу | 1986 |
|
SU1465158A1 |
| Автоматизированный комплекс для листовой штамповки | 1979 |
|
SU774722A1 |
| Робот к штамповочному прессу | 1982 |
|
SU1127674A1 |
| Промышленный робот | 1983 |
|
SU1155334A1 |
| РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ МНОГОПЕРЕХОДНОЙ ШТАМПОВКИ | 1993 |
|
RU2082527C1 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ ЗАГОТОВОК В ПРЕСС | 1993 |
|
RU2063287C1 |
| Автоматизированный комплекс для многономенклатурной штамповки деталей из штучных заготовок | 1984 |
|
SU1214290A1 |
| Автоматизированная линия штамповки деталей | 1986 |
|
SU1389914A1 |
| Устройство для подачи материала в рабочую зону пресса | 1987 |
|
SU1488075A1 |
| Технологический модуль для объемной штамповки | 1988 |
|
SU1648607A1 |


Изобретение относится к автоматизации штамповочных работ. Целью изобретения является повышение надежности в работе. Это достигается тем, что система управления робота снабжена логическим устройством, связанным с датчиками. По команде от системы управления 25 включаются механизм поворота 9, силовой пневмоцилиндр 12, и приводной вал 14 приводит в движение руку 2. Рука с двуплечим рычагом 4 перемешается к прессу 27 или от него по заданной программе. 2 з.п. ф-лы, 4 ил.
I J/
фиг.МБ
| Промышленный робот | 1974 |
|
SU503712A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
