Изобретение относится к исполнительным органам промышленных роботов и манипуляторов, применяемых во Eicex областях народного хозяйства.
Цель изобретения - увеличение нагрузочной способности и улучшение динамических характеристик, что обеспечивается за счет того, что во всем диапазоне перемещений компенсируются нагрузки на стержень, т. е. пол ностью устраняется коп- сольность руки.
.На фиг. ,1 сх§Штически изображена рука робота, л« фиV. 2 - то же, с устройст- вб.м pe y иpoвки опорного элемента. ,Л
робота .содержит стержень 1, являющийся вых одным звеном (штоком) привода поступательного перемещения, например силового цилиндра 2, при этом на конце штока размещено захватывающее устройство 3. Рука робота также имеет продольную направляющую 4, установленную параллельно на корпусе силового цилиндра 2, и разгрузочное устройства, выполненное в виде Г-образного кронщтейна 5, одна (меньщая) полка 6 которого смонтирована непосредственно на захватывающем устройстве, а вторая (большая) полка 7 снабжена направляющей втулкой 8, установленной с возможностью перемещения вдоль продольной направляющей 4. На второй полке 7 Г-образного кронщтейна установлен опорный элемент 9, а на корпусе силового цилиндра 2 щарнирно, при помощи щарнира 10, установлен рычаг 11 с противовесом 12. Опорный элемент 9 оснащен втулкой 13, установленной с возможностью регулировочного перемещения относительно второй полки 7 Г-образного кронщтейна и фиксации на нем при помощи зажима 14. При этом опорный элемент 9 взаимодействует с рычагом 11.
Устройство работает следующим образом.
Стержень 1, на конце которого размещено захватывающее устройство 3, приводом поступательных перемещений (силовым цилиндром) 2 выдвигают влево из исходного положения (фиг. 1) в заданную точку. При этом перемещается влево и Г-образный крон0
штейн, (одна) меньшая полка 6 которого смонтирована непосредственно на захваты- устройстве 3, а (вторая) большая полка 7 снабжена направляюш,ей втулкой 8, перемещающейся по продольной направляющей 4, причем опорный элемент 9 установлен на второй полке 7 и взаимодействует с рычагом 11, закрепленным в шарнире 10, и перемещается влево от противовеса 12 к шарниру 10. После выдвижения в задан5
5
ную точку производят захват детали или другого предмета и перемещают его вправо в исходное положение захватывающего устройства и укладывают в тару. Далее цикл повторяется.
При осуществлении рабочего цикла изменяется соотнощение плеч /i, /2, /3 (фиг. 2) и тем самы.м сохраняется нагрузочная способность, точность позиционирования и динамические характеристики руки робота во всем диапазоне перемещений, причем нагру- 0 зочная способность может изменяться путе.м перемещения втулки 13 опорного элемента 9 по второй полке 7 Г-образного крон- 1птейна. Опорный элемент 9 закрепляется на второй полке 7 при помощи зажима 14.
Формула изобретения
Рука робота, содержащая привод в виде силового цилиндра, на щтоке которого размещено захватывающее устройство, продольную направляющую, установленную параллельно оси корпуса силового цилиндра, и разгрузочное устройство, выполненное в виде Г-образного кронщтейна, одна полка которого закреплена на захватном устройстве, а вторая имеет направляющую втулку, установленную с возможностью перемещения вдоль продольной направляющей, отличающаяся тем, что, с целью увеличения нагрузочной способности и улучшения динамических характеристик, она снабжена рычагом с противовесом, шарнирно установленным на корпусе силового цилиндра, и опор- 0 ным элементом, установленным на второй полке Г-образного кронштейна, с возможностью регулировочного пере.мещения относительно последнего и взаимодействия с указанным рычаго.м.
0
5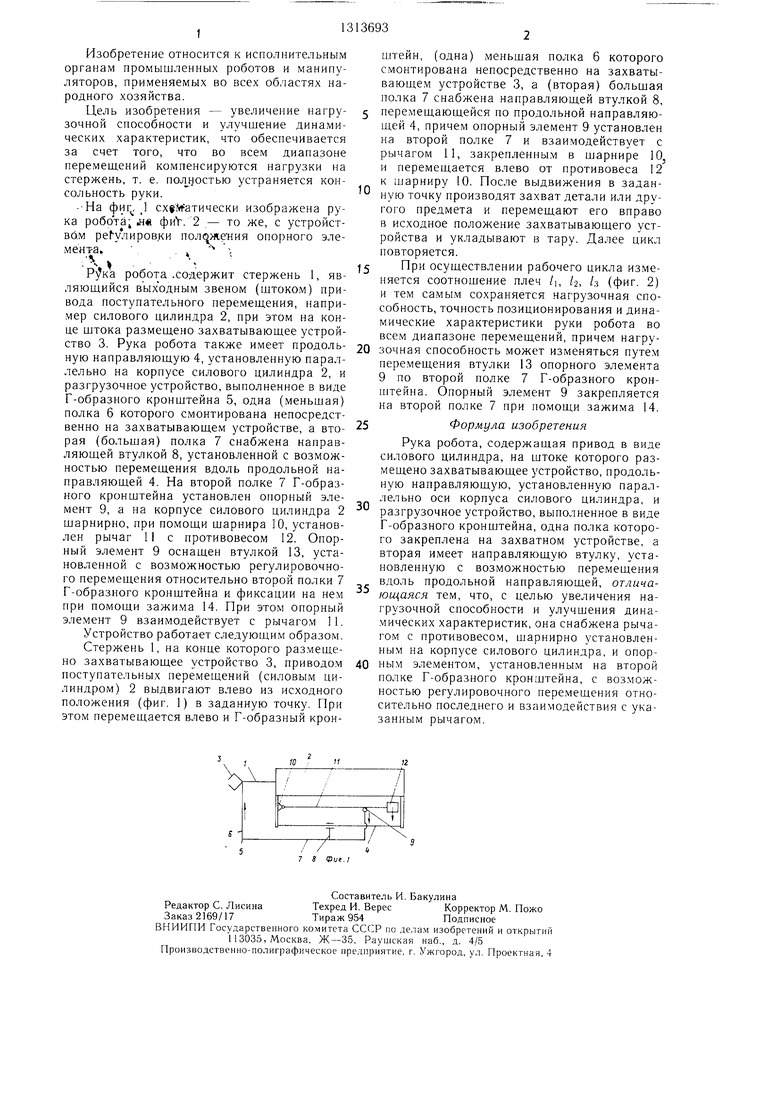
| название | год | авторы | номер документа |
|---|---|---|---|
| Рука робота | 1983 |
|
SU1146195A1 |
| Рука робота | 1985 |
|
SU1306709A1 |
| Автоматизированный комплекс для листовой штамповки | 1979 |
|
SU774722A1 |
| Автоматизированный технологический комплекс для прессования изделий из порошков | 1991 |
|
SU1801048A3 |
| Автоматическая линия штамповки лезвий стрельчатых лап | 1984 |
|
SU1255263A1 |
| Захватное устройство к погрузчику | 1978 |
|
SU749798A1 |
| Промышленный робот | 1986 |
|
SU1348166A1 |
| Промышленный робот | 1988 |
|
SU1616812A1 |
| Промышленный робот | 1982 |
|
SU1186077A3 |
| Промышленный робот | 1982 |
|
SU1125127A1 |
Изобретение относится к исполнительным органам промышленных роботов и манипуляторов, применяемых во всех областях народного хозяйства. Целью изобретения является увеличение нагрузочной способности и улучшение динамических характеристик за счет того, что во всем диапазоне перемещений компенсируются нагрузки на стержень, т. е. полностью устраняется кон- сольность руки. На конце стержня 1, явля- ЮШ.ИМСЯ выходным звеном силового цилиндра 2, размешено захватываюш.ее устройство 3. При этом продольная направляюш.ая 4 установлена параллельно на корпусе силового цилиндра 2, а разгрузочное устройство выполнено в виде Г-образного кронштейна 5, одна полка 6 которого смонтирована непосредственно на захватываю- шем устройстве, а другая полка 7 снабжена направляющей втулкой 8, установленной с возможностью перемещения вдоль продольной направляюшей 4, а так же опорным элементом 9. Причем на корпусе силового цилиндра шарнирно установлен рычаг 11 с противовесом, а опорный эле.мент 9 имеет возможность регулировочного перемещения и взаимодействия с рычагом 11. При перемешении захватывающего устройства 3 в заданную точку перемещается и Г-об- разный кронштейн. При осуществлении рабочего цикла изменяется соотношение плеч /I, /2, /3 и тем самым сохраняется нагрузочная способность. 2 ил. (Л 12 со ОС О5 со 00 Фиг. 2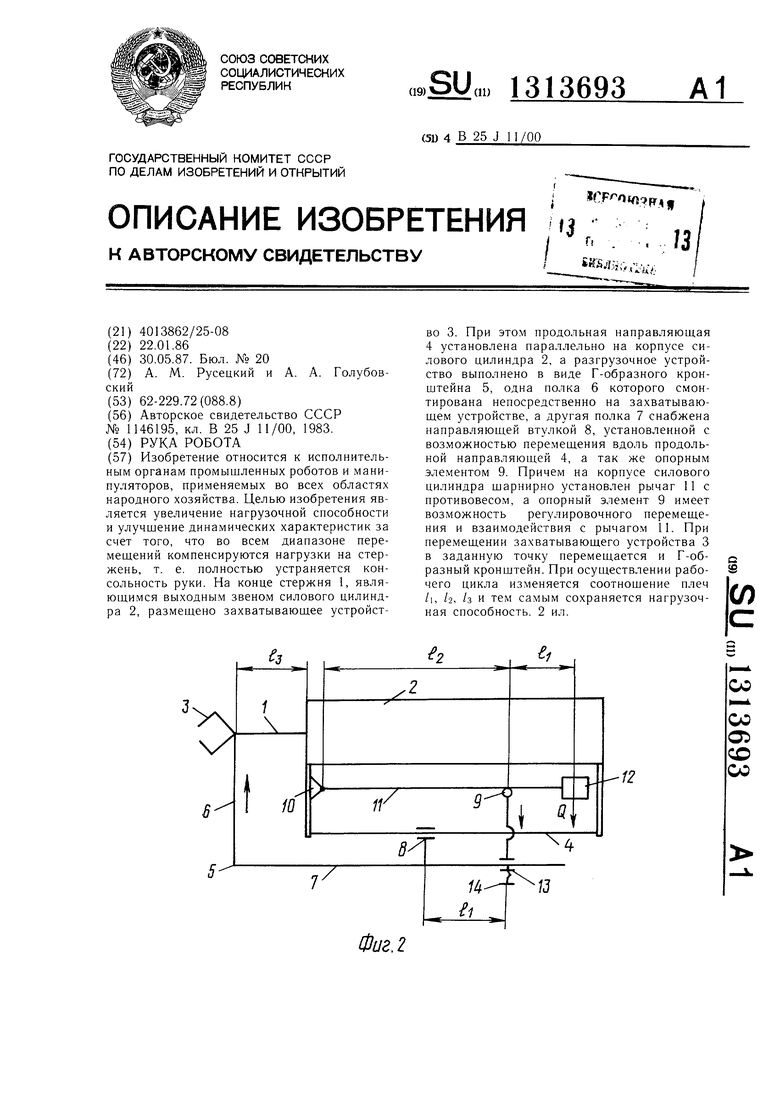
7 S Q3uf./
Составите..) И. Бакулина
Редактор С. ЛисинаТехред И. ВересКорректор М. Пожо
Заказ 2169/17Тираж 954Подписное
ВНИИПИ Государственного комитета СССР по дела.м изобретений и открытий
И 3035, Москва. , Раушская наб., д. 4/5 Произ15одственно-полиграфическое предприятие, г. Ужгород, ул. Проектная. 4
| Рука робота | 1983 |
|
SU1146195A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
