1
Изобретение относится к исполнительным органам промышленных роботов и манипуляторов, применяемых во всех областях народного хозяйства.
Цель изобретения - снижение металлоемкости и улучшение динамических характе- ристик.
На чертеже показано предлагаемое устройство.
Рука робота содержит привод в виде силового цилиндра 1, на штоке 2 которого размещено захватываюш,ее устройство 3, продольную направляющую 4, установленную параллельно оси корпуса силового цилиндра, разгрузочное устройство, выполненное в виде Г-образного кронштейна 5. Одна полка 6 Г-образного кронштейна шарпир- но связана со штоком 2 силового цилиндра L а другая полка 7 - с основной направляюшей втулкой 8. Кроме того, загрузочное устройство снабжено дополнительной паправляюш,ей втулкой 9, стержнем 10, шарнирно связывающим основную направляющую втулку 8 и дополните.льную направляющую втулку 9, и упругим э.чемеп- том 11, например фужиной, соединяющим дополнительную направляющую втулку 9 с полкой 7 Г-образного крониггейна 5.
Устройство работает следующим образом.
При подаче рабочей среды в штоковую или бесштоковую полость силового цилиндра 1 TopnieHb с прикрепленным к ei o штоку 2 захватывающим устройством 3 пере- мешается в соответствующую сторону, при этом консольные подвижные части захваты- ваюп1его устройства 3 и штока 2 силового
1306709
s
5
0
0
цилиндра 1 уравновешиваются разгрузочным устройством следующим образом.
Установленный между полкой 7 Г-образного кронщтейна 5 и дополнительной направляющей втулкой 9 упругий элемент 11 уравновешивает момент сил веса захватывающего устройства 3, штока 2 силового цилиндра 1 и полки 7 Г-образного кронштейна 5 относительно шарнирного сочленения последнего с основной направляющей втулкой 8.
Формула изобретения
Рука робота, содержащая привод в виде силового цилиндра, на штоке которого раз- 1еп1,ено захватывающее устройство, продольную направляющую, установленную параллельно оси корпуса силового цилиндра, и разгрузочное устройство, выполненное в виде Г-образного кронштейна, одна полка которого закреплена на штоке, а другая имеет основную направляющую втулку, установленную с возможностью перемещения вдоль продольной направляющей силового цилиндра, отличающаяся тем, что, с целью снижения металлоемкости и улучшения динамических характеристик, одна полка Г-образного кронштейна разгрузочного устройства шарнирно связана со штоком силового цилиндра, а другая - с основной направляющей втулкой, при этом разгрузочное устройство снабжено дополнительной направляющей втулкой, стержнем, шарнирно связывающим основную и дополнительную направляющие втулки, и упругим элементом, соединяющим последнюю с другой полкой Г-образного кронштейна.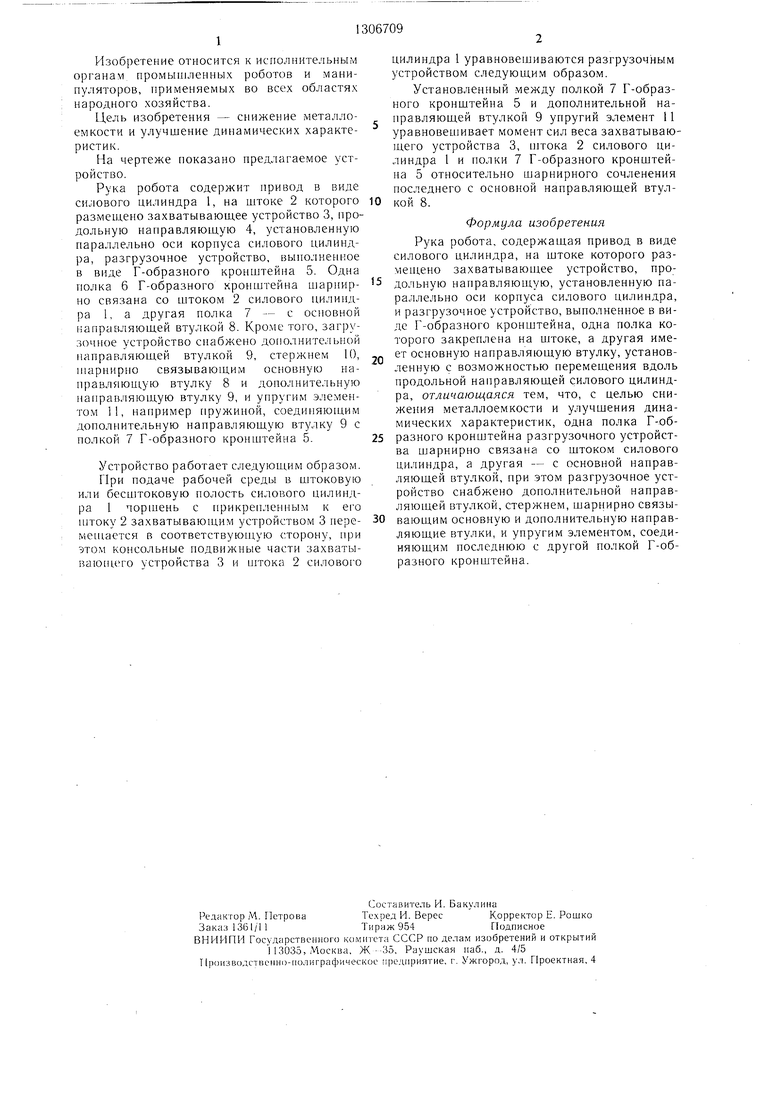
| название | год | авторы | номер документа |
|---|---|---|---|
| Рука робота | 1986 |
|
SU1313693A1 |
| Рука робота | 1983 |
|
SU1146195A1 |
| Автоматизированный технологический комплекс для прессования изделий из порошков | 1991 |
|
SU1801048A3 |
| МАНИПУЛЯТОР РОБОТА | 2015 |
|
RU2616317C1 |
| Устройство для формирования группы кирпичей и переноса их на вагонетку | 1982 |
|
SU1071434A1 |
| Промышленный робот | 1975 |
|
SU597327A3 |
| СЕЛЬСКОХОЗЯЙСТВЕННЫЙ МАНИПУЛЯТОР | 1999 |
|
RU2166846C2 |
| Манипулятор | 1988 |
|
SU1569222A1 |
| ГРУЗОПОДЪЕМНАЯ СТРЕЛА КРАНО-МАНИПУЛЯТОРНОЙ УСТАНОВКИ | 1999 |
|
RU2169694C2 |
| МАНИПУЛЯТОР | 1999 |
|
RU2167100C1 |
Изобретение относится к исполнительным органам промышленных роботов и манипуляторов, применяемых во всех областях народного хозяйства. Целью изобретения является снижение металлоемкости и улучшение динамических характеристик. Рука робота содержит привод в виде силового ци7 W линдра 1, на штоке 2 которого размещено захватывающее устройство 3, продольную направляющую 4 и загрузочное устройство, выполненное в виде Г-образного кронштейна 5, одна полка 6 которого шарнир- но связана со щтоком 2 силового цилиндра I, а другая полка 7 - с основной направляющей втулкой 8. Основная 8 и дополнительная 9 направляющие втулки шарнирно соединены между собой стержнем 10, а упругий элемент II соединяет дополнительную направляющую втулку 9 с другой полкой 7 Г-образного кронштейна 5. При выдвижении захватывающего устройства 3 упругий элемент И уравновещива- ет момент сил веса захватывающего устройства 3, штока 2 силового цилиндра I и полки 7 относительно щарнирного сочленения последнего с основной направляющей втулкой 8. I ил. i (Л О С5 О со
| Рука робота | 1983 |
|
SU1146195A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
