Известны способ регулирования предохранительного торможения шахтных подъемных машин путем воздействия на управляемый регулятор давления.
Предложенный способ отличается тем, что регулирование тормоза производят по нагрузке путем измерения разности натяжений подъемных канатов с учетом направления движения груза.
Это позволяет обеспечить заданную величину замедления подъемной машины.
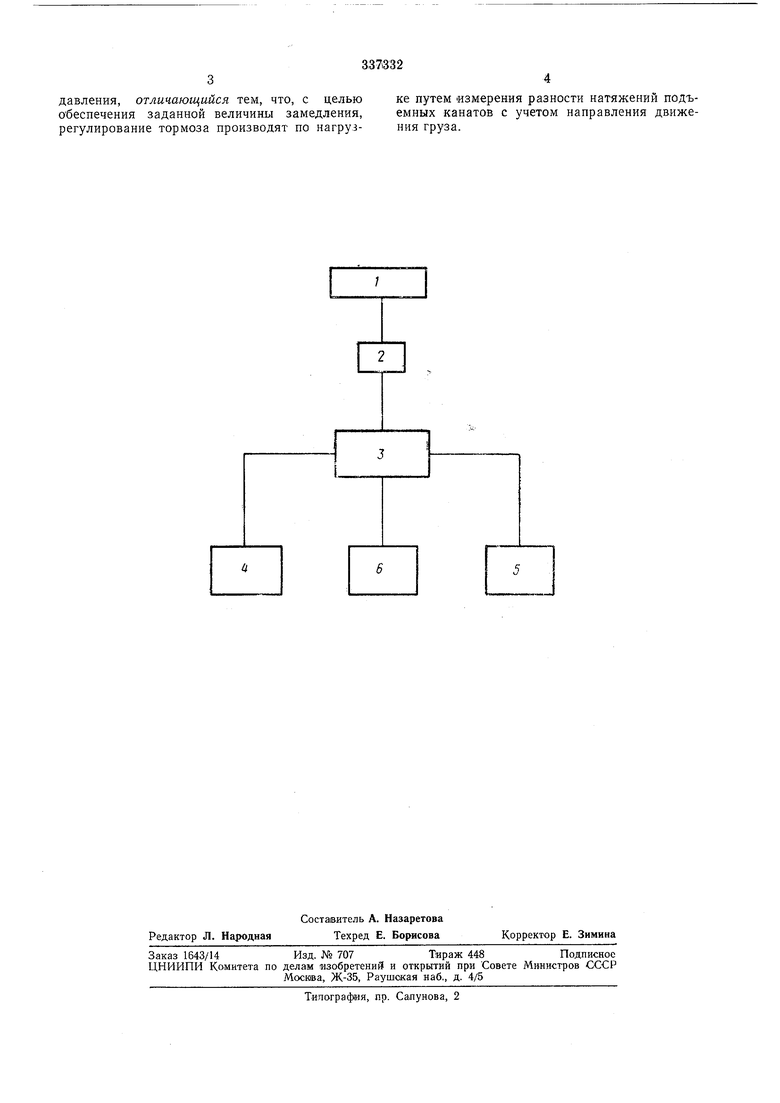
Регулирование по предложенному способу осуш,ествляют при помощи системы, состояш;ей из регулятора давления 1, привода 2, коллектора 3, датчиков нагрузки 4 и 5 и датчика направления 6. Датчик нагрузки 4 измеряет усилие натяжения в одной подъемной ветви каната, а датчик 5 - в другой.
Выходные электрические сигналы этих датчиков при -помощи датчика направления 6 вычитаются, а их разность А/ подается на коллектор 3.
Коллектор выполняет несколько функций. Во-шервых, он создает постоянный электрический сигнал (Io const) для поворота регулировочного винта на угол, при котором развивается тормозной момент, необходимый для. торможения подъемной установки в режиме перегона порожних сосудов при их встрече в
стволе. В этом случае At 0. Во-вторых, в коллекторе алгебраически суммируется разность сигналов At с базисным сигналом также при помощи датчика направления 5. Если происходит подъем груза, от базисного сигнала (/б) вычитается разность сигналов нагрузки гб- Ai. При этом уменьшается угол поворота регулировочного винта, а следовательно, и тормозной момент. При лодъеме груза происходит суммирование га + А/, т. е. увеличиваются угол поворота и тормозной момент, развиваемый предохранительным тормозом. Таким образом, предлагаемый способ предусматривает во время работы машины непрерывное вращение регулировочного винта регулятора давления с таким расчетом, чтобы величина замедления развиваемого предохранительным тормозом была близкой к постоянному значению независимо от режима работы подъемной установки. Причем воздействие на управляемый регулятор давления производится до получения импульса на начало предохранительного торможения.
25
Предмет изобретения
давления, отличающийся тем, что, с целью обеспечения заданной величины замедления, регулирование тормоза производят по нагрузке путем Измерения разности натяжений подъемных канатов с учетом направления движения груза.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ предохранительного торможения шахтного подъемника и устройство для его осуществления | 1978 |
|
SU763229A1 |
| Способ регулирования процесса предохранительного торможения шахтной подъемной машины | 1983 |
|
SU1146269A1 |
| Устройство для предотвращения проскаль-зыВАНия KAHATA шАХТНОгО пОд'ЕМНиКА | 1970 |
|
SU827368A1 |
| Способ управления агророботом | 1987 |
|
SU1556557A1 |
| Устройство для управления тормозными режимами подъемной машины | 1979 |
|
SU781170A1 |
| Способ защиты шахтной подъемной установки от напуска каната | 1987 |
|
SU1572967A1 |
| Устройство для управления тормозом шахтной подъемной машины | 1989 |
|
SU1757981A1 |
| Способ предохранительного торможения подъемной машины | 1983 |
|
SU1346552A1 |
| Гидропривод тормоза подъемной машины | 1984 |
|
SU1203015A1 |
| Система управления тормозом шахтной подъемной машины | 1981 |
|
SU1009994A1 |