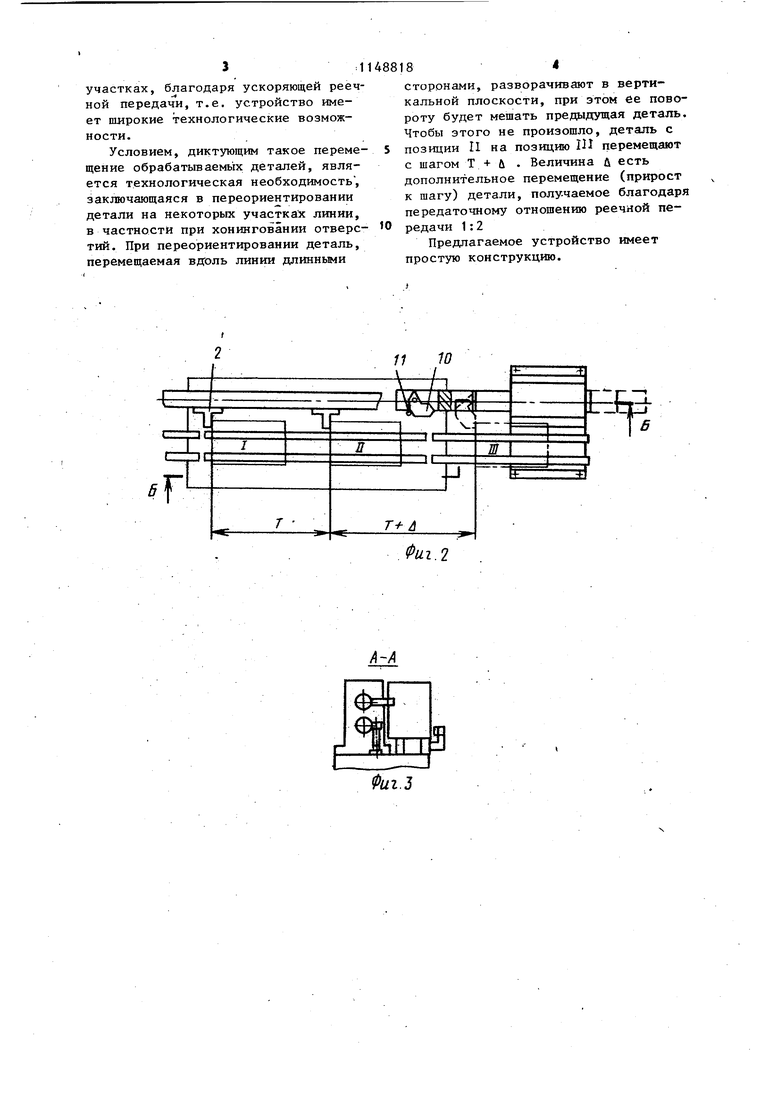
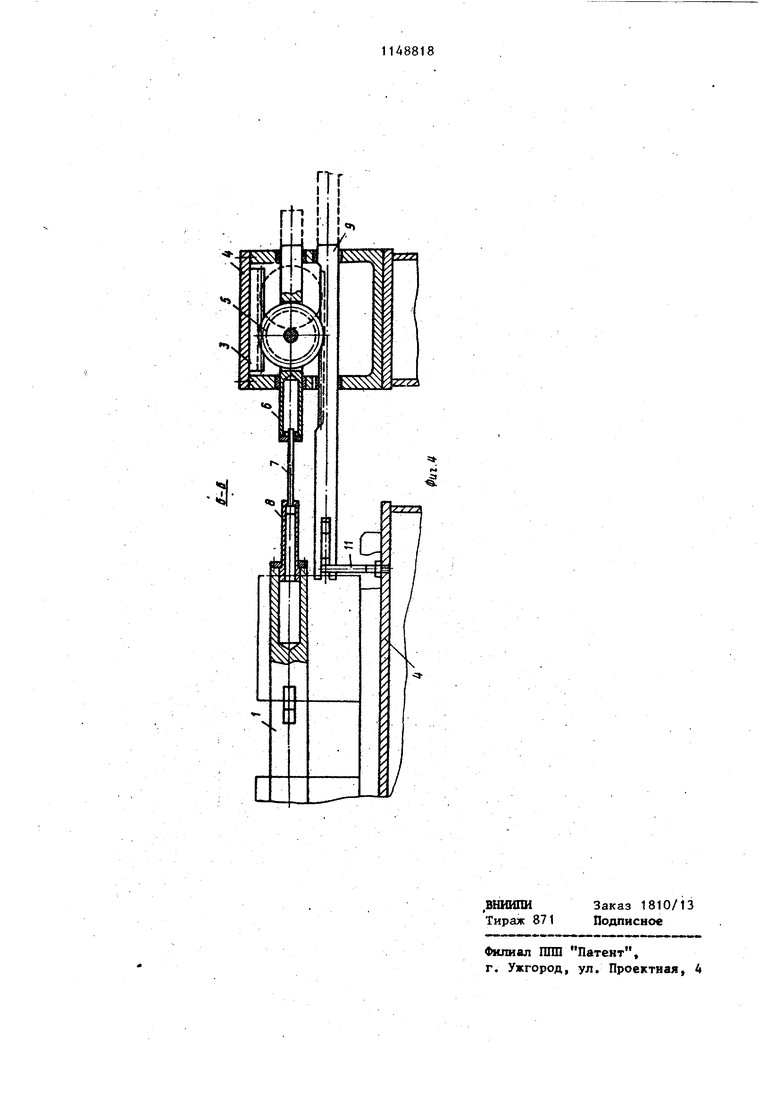
Изобретение относится к станкостроению, в частности к транспортны устройствам .автоматических линий с раэноциклическим оборудованием. Известен штанговый конвейер с пе менным шагом, содержащий штангу с установленньми на ней группами толкателей, расстояние между которыми больше хода штанги, а расстояние между толкателями группы равно мень шему шагу перемещения изделий Щ. Однако в механизме изменение шага трайспортирования детали может производиться только с большего на меньший, что сужает его технологические возможности. Наиболее близким к предлагаемому является шаговьй конвейер, содержащий неподви)кную раму, установленную с закрепленными на ней собачками, привод возвратно-поступательного пе ремещения штанги и механизм изменен шага 2 . Однако в известном транспортере изменение величины/ перемещения . детали или спутнгаса достигается путем выдвижения отдельным гидроцилиндром дополнительных упоров, задерживающих движение деталей при прямой ходе штанги конвейера. Наличие отдельного привода механизма изменения шага усложняет конструкцию, так как для управления им требуется гидростанция. Кроме того, конструкций не обеспечивает изменения шага Q постоянного на больший, что сужает технологические возможности конвейера. Цель изобретения - упрощение кон струкции конвейера. Поставленная цель достигается тем, что в шаговом конвейере, содер жащем неподвижную раму, установленную на неподвижной раме штангу с закрепленными на ней собачками, при вод возвратно-поступательногр перемещения штанги и механизм изменения шага, последа}ий выполнен в виде установленного на неподвижной раме с возможностью возвратнр-поступател ного перемещения толкателя с закреп ленной на нем шестерней, рейки, жестко связанной с неподвижной рамб и установленной с возможностью зацепления с; шестерней, и дополните ль ной штанги с размещенной на ней собачкой, при 3toM дополнительная штанга установлена на неподвижной 18 раме с возможностью зацепления с шестерней, а толкатель телескопически связан с основной штангой. На фиг.-1 представлен участок конвейера автоматической линии, вид спереди; на фиг. 2 - то же, вид сверху; на фиг. 3 - сечение А-А на фиг. 1; на фиг. 4 - сечение Б-Б на фиг.. 2, увеличено. Конвейер состоит из привода конвейера и привода поворота штанги (не показано), которые сообщают соответственно возвратно-поступательное и поворотное движения транспортной штанге 1 с жесткими собачками 2, механизма изменения шага конвейера, выполненного в виде ускоряющей шестеренно-реечной передачи, состоящей из неподвижной рейки 3, жестко закрепленной на неподвижной раме 4, и шестерни 5 с осью вращения, размещенной на тод1кателе 6, телескопически соединенном через тягу 7 и втулку 8 со штангой 1. Дополнительная транспортная штанга 9 с размещенно й на ней дополнительной храповой собачкой 10 выполнена в виде рейки, в зацеплении с которой находится шестерня 5. Упор 11, взводящий собачку 10, расположен на неподвижной раме 4. Устройство работает следующим образом. При перемещении штанги 1 с жесткими собачками 2 вправо производится транспортирование детали вправо на шаг Т. В то время, когда торец штанги 1 упрется в торец толкателя .9 с храповой собачкой 10, последняя сойдет с упора 11, захватит деталь, поступившую с позиции 11 и переместит ее на позицию Ш с шагом Т Д . После этого срабатывают приводы поворота и возвратно-поступательного перемещения штанги 1, возвращая ее в исходное положение. Дополнительная штанга 9 и толкатель 6 возвращаются в исходаое положение посредством телескопического соединения со штангой 1, а дополнительная собачка 10 взводится упором 11, занимая исходное положение. Далее цикл повторяется. Таким образом. Изобретение позволяет транспортировать детали на отдельных участках с шагом, отличным от шага Т транспортировки на других участках, благодаря ускоряющей реечной передачи, т.е. устройство имеет широкие технологические возможности. Условием, диктующим такое переме щение обрабатываемых деталей, является технологическая необходимость , заключающаяся в переориентировании детали на некоторых участках линии, в частности при хонинговании отверс тий. При переориентировании деталь, перемещаемая вдоль линии длинными 8 Сторонами, разворачивают в вертикальной плоскости, при этом ее повороту будет мещать предыдущая деталь. Чтобы этого не произошло, деталь с позиции И на позицию 1И перемещают с шагом Т + U . Величина Д есть дополнительное перемещение (прирост к шагу) детали, получаемое благодаря передаточному отношению реечной передачи 1:2 Предлагаемое устройство имеет простую конструкцию.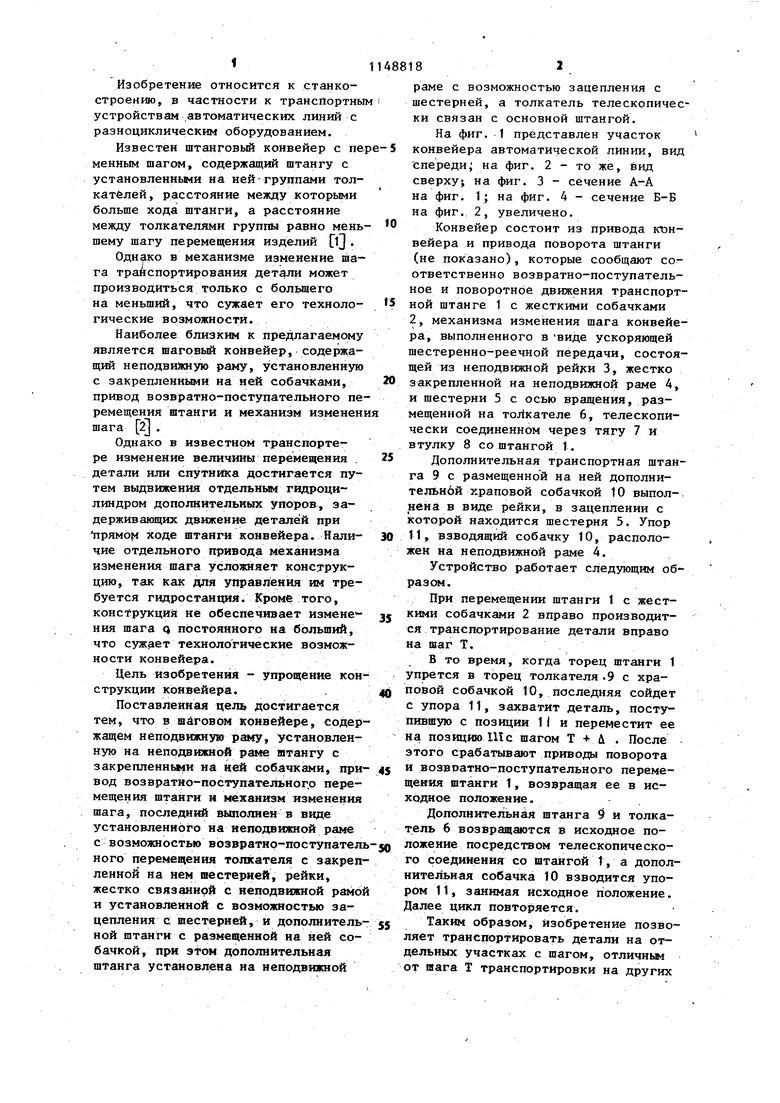
| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый конвейер | 1990 |
|
SU1787881A1 |
| Шаговый конвейер | 1990 |
|
SU1751107A1 |
| Транспортное устройство автоматических линий | 1982 |
|
SU1033405A1 |
| Транспортно-технологический ротор | 1988 |
|
SU1586795A1 |
| Устройство для шлифования деталей из древесины | 1983 |
|
SU1135616A1 |
| Шаговый конвейер | 1988 |
|
SU1546366A1 |
| Устройство для поштучной выдачи изделий | 1986 |
|
SU1425042A1 |
| ШАГОВЫЙ КОНВЕЙЕР | 1973 |
|
SU404721A1 |
| Шаговый конвейер | 1989 |
|
SU1645214A2 |
| Автоматизированный комплекс для штамповки | 1985 |
|
SU1291253A1 |
ШАГОВЫЙ КОНВЕЙЕР, содержащий неподвижную раму, установленную на неподвижной раме штангу с закрепленными на ней собачками, привод возвратно-поступательного перемещения штанги и механизм изменения шага, о т лич ающи и с я тем, что, с целью упрощения конструкции конвейера, механизм изменения шага выполнен в виде установленного на неподвижной раме с возможностью возвратнопоступательного перемещения толкателя с закрепленной на нем шестерней, рейки, жестко связанной с неподвижной рамой и установленной с возможностью зацепления с шестерней, и дополнительной штанги с размещенной на ней собачкой, при этом дополнительная штанга установлена иа неподвижной р.аме с возможностью зацепления с шестерней, а толкатель телеско(Л пически связан с основной штангой.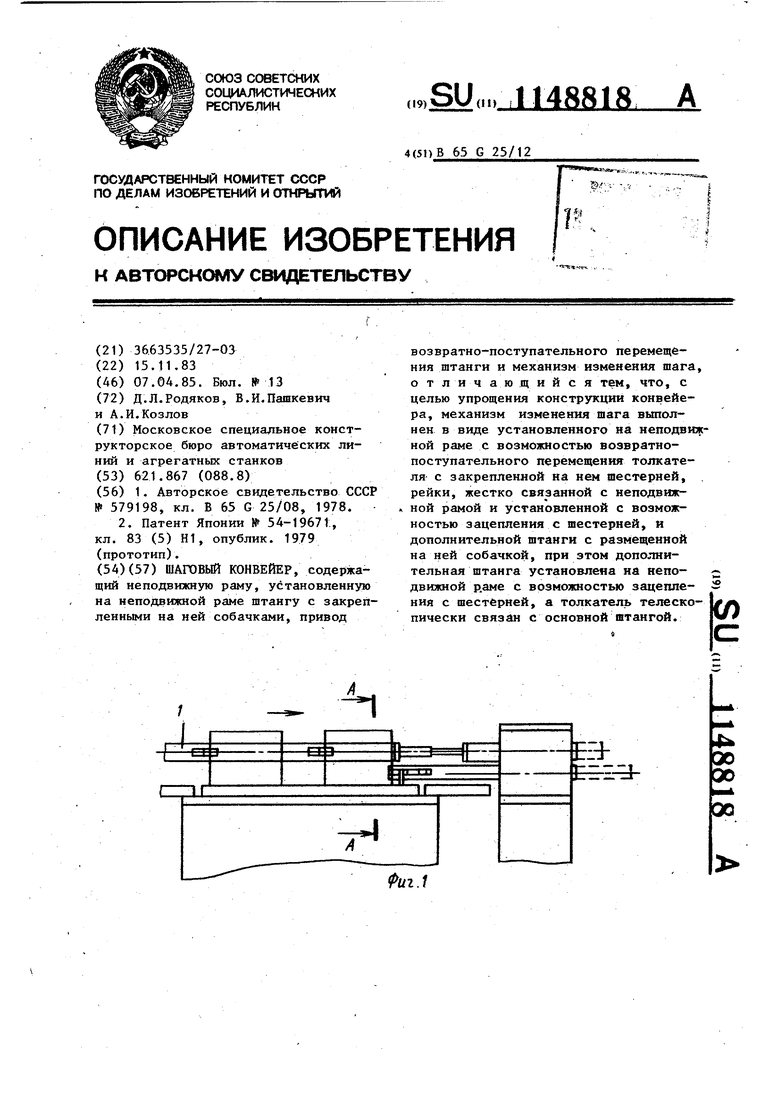
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Штанговый конвейер с переменным шагом | 1974 |
|
SU579198A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
| Пуговица | 0 |
|
SU83A1 |
