Изобретение относится к транспортным средствам автоматических линий металлорежущих станков и предназначено для перемещения обрабатываемых деталей
Известен шаговый конвейер, содержащий штангу с упорами и управляемой собачкой, установленной с возможностью возвратно-поступательного перемещения. Поворот собачки на деталь и от нее осуществляется приводом через шпонку.
Недостатком указанного конвейера является наличие шпонки на штанге, находящейся в постоянном зацеплении с механизмом поворота собачки и имеющей длину, большую шага конвейера, что приводит к увеличению длины автоматической линии, в которую встроен конвейер.
Известен шаговый конвейер, содержащий расположенные на неподвижной раме направляющие для деталей, установленную с возможностью возвратно-поступательного перемещения вдоль направляющих для деталей штангу с жестко закрепленной на ней собачкой и поворотной концевой собачкой, смонтированной на цилиндрическом корпусе, установленном с возможностью поворота относительно штанги и совместно с ней, расположенный с возможностью возвратно-поступательного перемещения в направлении,перпендикулярном
vi ел
о х|
направлению транспортирования, толкатель с пазом, соединенный с корпусом палец,
установленный с возможностью размещения в пазу толкателя в конце хода штанги, и приводы продольного перемещения и поворота штанги.
Недостатками известного конвейера является наличие пружины, необходимой для удержания поворотной собачки в крайних положениях, что уменьшает надежность конвейера, а также невозможность поворота основной и поворотной собачек на разные углы, что при некоторых конфигурациях детали и компоновке станка приводит к усложнению его конструкции, увеличению габаритов.
Целью изобретения является повышение надежности работы конвейера и упрощение его конструкции.
Поставленная цель достигается тем, что в шаговом конвейере, содержащем расположенные на неподвижной раме направляющие для деталей, установленную с возможностью возвратно-поступательного перемещения вдоль направляющих для деталей штангу с жестко закрепленной на ней собачкой и поворотной концевой собачкой, смонтированной на цилиндрическом KCfpny- се, установленном с возможностью поворота относительно штанги и совместно с ней, расположенной с возможностью возвратно- поступательного перемещения в направлении, перпендикулярном направлению транспортирования, толкатель с пазом, соединенный с корпусом палец,установленный с возможностью размещения в пазу долкателя в конце хода штанги, и приводы продольного перемещения и поворота штанги, корпус выполнен с двумя продольными радиальными пазами на его наружной поверхности, а неподвижная рама выполнена с расположенной вдоль направляющих для деталей шпонкой, установленной с возможностью поочередного размещения в продольных радиальных пазах корпуса при прямом и обратном ходах штанги.
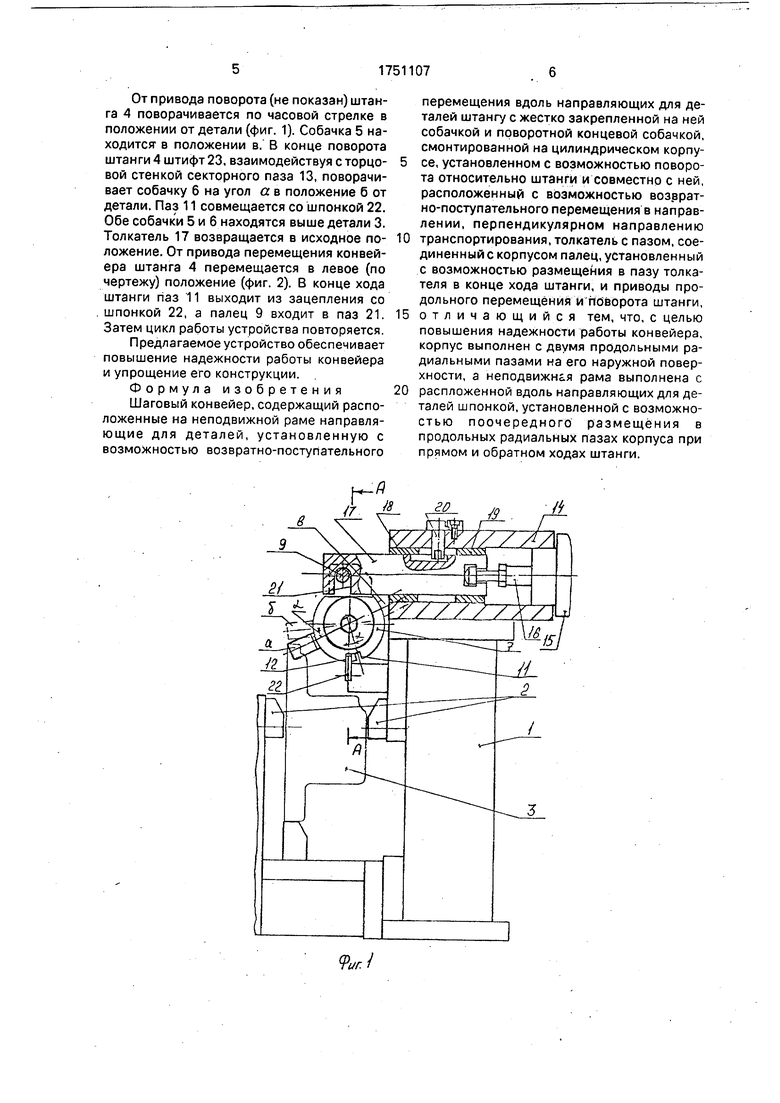
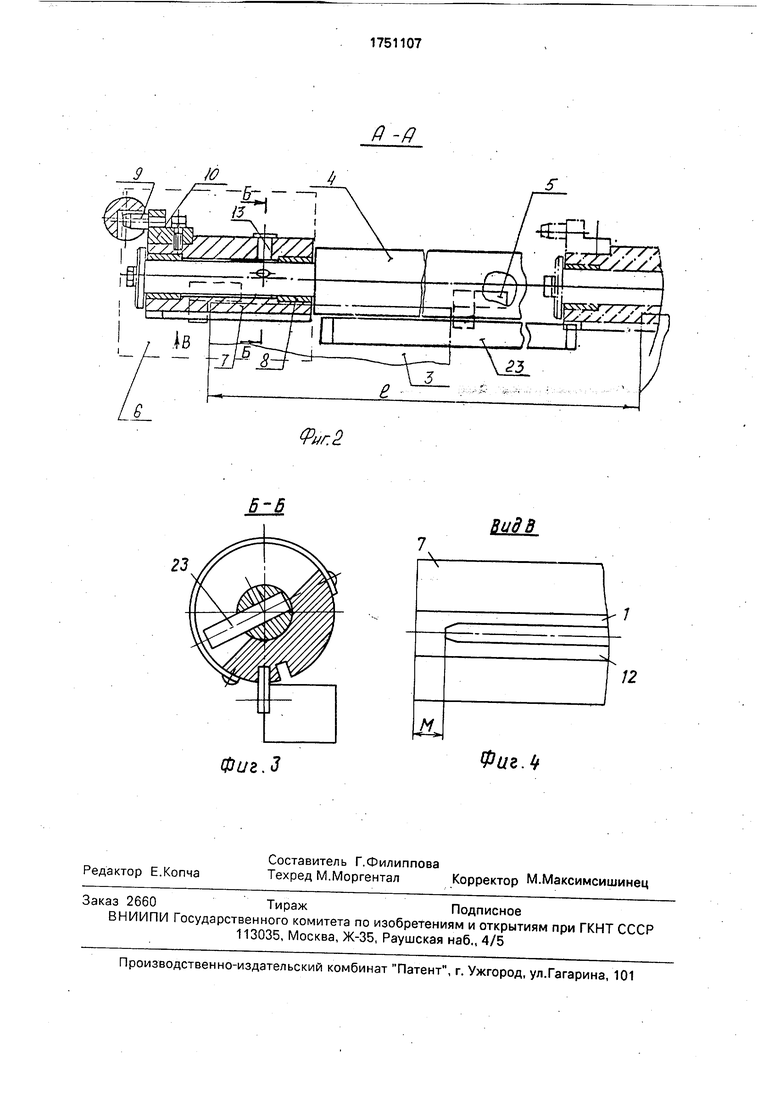
На фиг. 1 изображен конвейер, общий вид; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - сечение Б-Б на фиг. 2; на фиг. 4 - вид В на фиг. 2.
Шаговый конвейер содержит неподвижную раму 1 с расположенными на ней направляющими 2 для обрабатываемой детали 3 и установленную с возможностью возвратно-поступательного перемещения вдоль направляющих 2 штангу 4 с жестко закрепленной на ней собачкой 5 и поворотной концевой собачкой 6. Собачка 6 смонтирована на цилиндрическом корпусе 7, установленном с возможностью поворота
относительно штанги 4 на втулках 8 и совместно со штангой 4. Собачка б выполнена с пальцем 9, закрепленным на корпусе 7 посредством кронштейна 10.
Корпус 7 собачки 6 выполнен с двумя
продольными радиальными пазами 11 и 12 на его наружной поверхности под углом а друг к другу, где а - угол поворота собачки б, соединенными между собой со стороны
ее свободного торца на участке М и секторным пазом 13.
Привод поворота собачки 6 может быть выполнен, например, в виде установленного в корпусе 14 гидроцилиндра 15, шток 16
которого соединен с толкателем 17, установленным во втулках 18 и 19 и связанным посредством шпонки 20 с корпусом 14. Толкатель 17 выполнен с пазом 21, предназначенным для взаимодействия с пальцем 9
собачки 6. Для исключения поворота собачки 6 при ее перемещении в осевом направлении рама 1 выполнена с расположенной вдоль направляющих 2 шпонкой 22, установленной с возможностью поочередного
размещения в продольных радиальных пазах 11 и 12 корпуса 7. Суммарная длина шпонки 22 и каждого из пазов 11 и 12 не превышает величину шага Iтранспортирования детали 3. В секторном пазу 13 размещен штифт 23, предназначенный для поворота собачки 6.
Предлагаемое устройство работает следующим образом.
В исходном положении штанга 4 находится в крайнем левом положении (фиг. 2), собачка 6 выведена из зацепления со шпонкой 22 и находится в положении б, а собачка
5- в положении а (фиг. 1). Палец 9 собачки
6находится в пазу 21 толкателя 17.
Деталь 3 устанавливается на первую позицию конвейера до упора в собачку 5, Собачка 6 от гидроцилиндра 15, воздействующего на толкатель 17, посредством пальца 9 поворачивается против часовой стрелки в положение к детали на угол а (см. фиг. 1). При этом паз 12 корпуса 7 собачки 6 совмещается со шпонкой 22 и собачки 5 и 6 охватывают деталь 3. Затем от привода перемещения конвейера (не показан) штанга 4 с деталью 3 перемещается вправо (по чертежу) на шаг Странспортиро- вания (фиг. 2). Во время перемещения детали 3 собачка 6 посредством паза 12 находится в зацеплении со шпонкой 22, что
исключает поворот собачки 6. В конце хода штанги 4 правый (по чертежу) конец шпонки 22 (фиг. 2) выходит из паза 12 и находится на участке М, соединяющем пазы 11 и 12.
От привода поворота (не показан) штанга 4 поворачивается по часовой стрелке в положении от детали (фиг. 1). Собачка 5 находится- в положении в. В конце поворота штанги 4 штифт 23, взаимодействуя с торцовой стенкой секторного паза 13, поворачивает собачку 6 на угол а в положение б от детали. Паз 11 совмещается со шпонкой 22. Обе собачки 5 и 6 находятся выше детали 3. Толкатель 17 возвращается в исходное положение. От привода перемещения конвейера штанга 4 перемещается в левое (по чертежу) положение (фиг. 2). В конце хода штанги паз 11 выходит из зацепления со шпонкой 22, а палец 9 входит в паз 21. Затем цикл работы устройства повторяется.
Предлагаемое устройство обеспечивает повышение надежности работы конвейера и упрощение его конструкции.
Формула изобретения
Шаговый конвейер, содержащий расположенные на неподвижной раме направляющие для деталей, установленную с возможностью возвратно-поступательного
перемещения вдоль направляющих для деталей штангу с жестко закрепленной на ней собачкой и поворотной концевой собачкой, смонтированной на цилиндрическом корпусе, установленном с возможностью поворота относительно штанги и совместно с ней, расположенный с возможностью возвратно-поступательного перемещения в направлении, перпендикулярном направлению
транспортирования, толкатель с пазом, соединенный с корпусом палец, установленный с возможностью размещения в пазу толкателя в конце хода штанги, и приводы продольного перемещения и поворота штанги,
отличающийся тем, что, с целью повышения надежности работы конвейера, корпус выполнен с двумя продольными радиальными пазами на его наружной поверхности, а неподвижная рама выполнена с
распложенной вдоль направляющих для деталей шпонкой, установленной с возможностью поочередного размещения в продольных радиальных пазах корпуса при прямом и обратном ходах штанги.
| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый конвейер | 1986 |
|
SU1472385A1 |
| Шаговый конвейер | 1983 |
|
SU1148818A1 |
| Кантователь деталей в автоматических линиях с шаговым конвейером | 1980 |
|
SU918210A1 |
| Штанговый конвейер | 1982 |
|
SU1121200A1 |
| Шаговый конвейер-накопитель | 1979 |
|
SU859259A1 |
| Шаговый конвейер | 1983 |
|
SU1084200A1 |
| Шаговый конвейер | 1984 |
|
SU1156984A1 |
| Шаговый конвейер | 1985 |
|
SU1288132A1 |
| Шаговый конвейер | 1982 |
|
SU1062142A1 |
| Шагающий конвейер | 1981 |
|
SU988690A1 |
Использование: изобретение относится к транспортным средствам автоматических линий металлорежущих станков и предназначено для перемещения обрабатываемых деталей. Сущность изобретения: шаговый конвейер содержит расположенные на неподвижной раме направляющие для деталей, установленную с возможностью возвратно-поступательного перемещения вдоль направляющих для деталей штангу с жестко закрепленной на ней собачкой и поворотной концевой собачкой, смонтированной на цилиндрическом корпусе, установленном с возможностью поворота относительно штанги и СОёГместйо с ней, расположенный с возможностью возвратно-поступательного перемещения в направлении, перпендикулярном направлению транспортирования, толкатель с пазом, соединенный с корпусом палец, установленный с возможностью размещения в пазу толкателя в конце хода штанги, и приводы продольного перемещения и поворота штанги Корпус выполнен с двумя продольными радиальными пазами на его наружной поверхности, а неподвижная рама выполнена с расположенной вдоль направляющих для деталей шпонкой, установленной с возможностью поочередного размещения в продольных радиальных пазах корпуса при прямом и обратном ходах штанги 4 ил со С
9
Фиг.2
Фиг.З
ff-ff
В ид 8
12
м
Фцг.Ь
| Шаговый конвейер | 1984 |
|
SU1156984A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
