Г 5
(Л
сд
оо
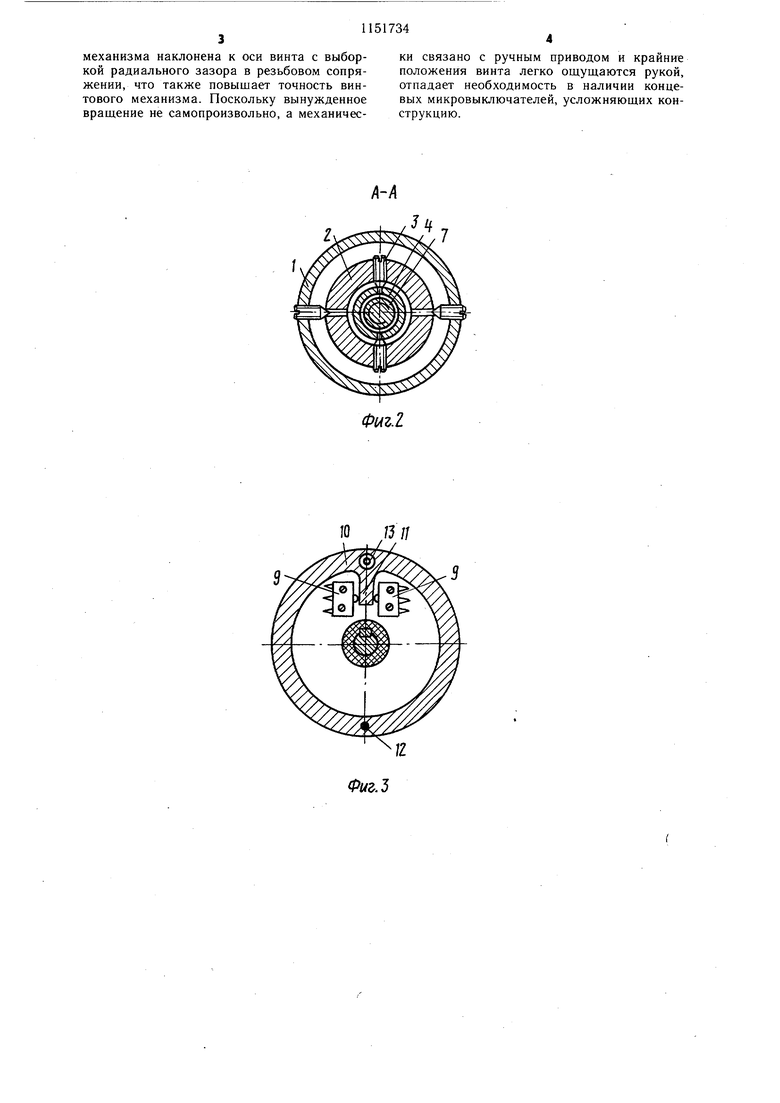
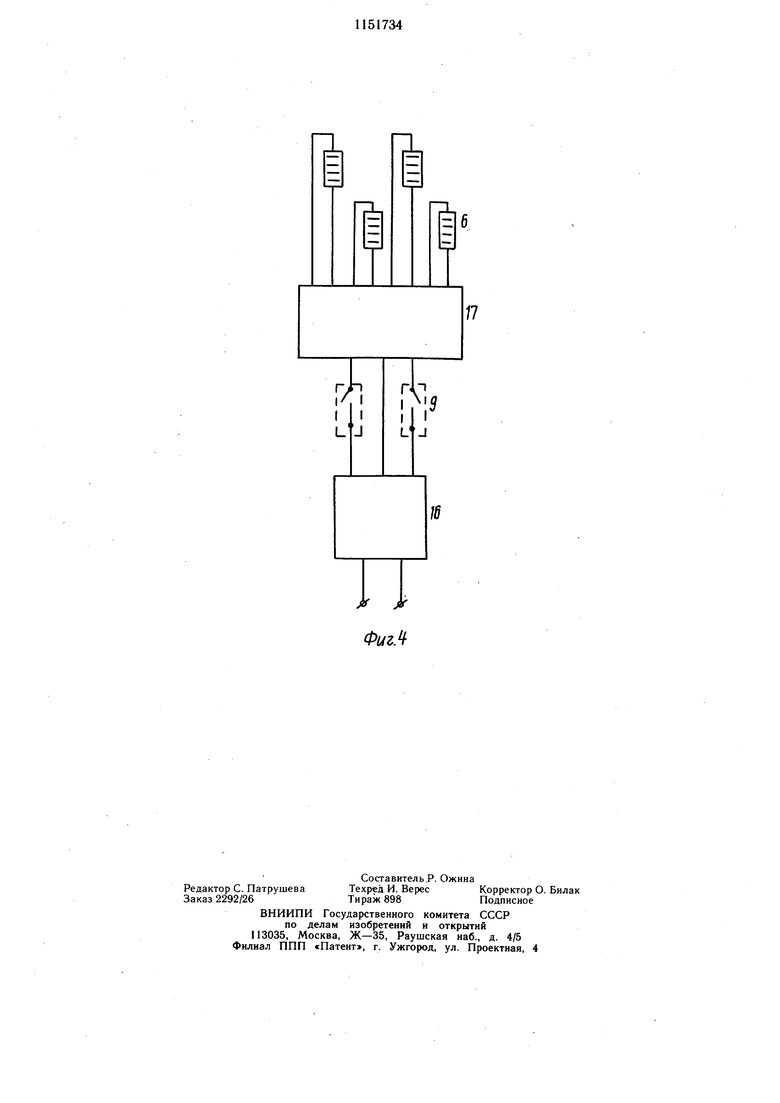
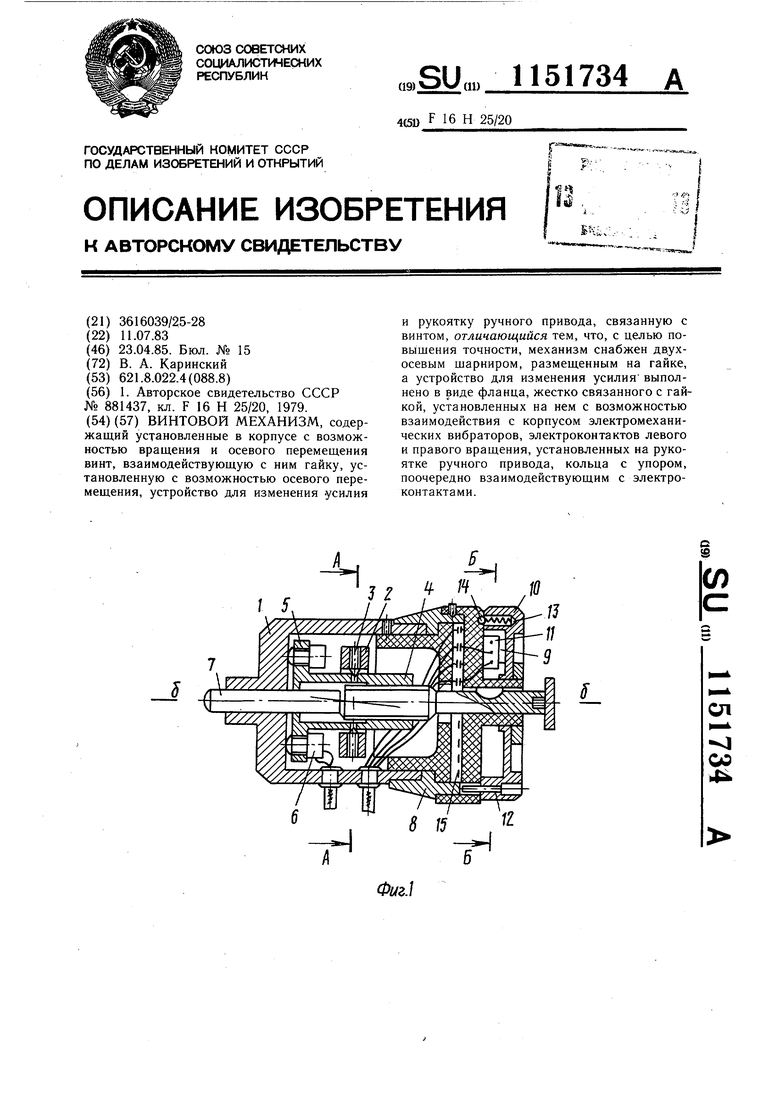
ь Изобретение относится к машиностроению и может быть использовано для реализации высокоточных и плавно работающих передач, например в приборостроении. Известен винтовой механизм, содержащий установленные в корпусе с возможностью вращения и осевого перемещения винт, взаимодействующую с ним гайку, установленную с возможностью осевого перемещения, устройство для изменения усилия и рукоятку ручного привода. Устройство для изменения усилия выполнено в виде винта с пружиной 1. Недостатком винтового механизма является сравнительно малая чувствительность перемещения. Цель изобретения - повыщение точности механизма. Указанная цель достигается тем, что винтовой .механизм, содержащий установленные в корпусе с возможностью вращения и осевого перемещения винт, взаимодействующую с ним гайку, установленную с возможностью осевого перемещения, устройство для изменения усилия и рукоятку ручного привода, связанную с винтом, снабжен двухосевым щарниром, размещенным на гайке, .а устройство для изменения усилия выполнено в виде фланца, жестко связанного с гайкой, установленных на нем с возможностью взаимодействия с корпусом электромеханических вибраторов, электроконтактов левого и правого вращения, установленных на рукоятке ручного привода, кольца с упором, поочередно взаимодействующим с электроконтактами. На фиг. 1 изображен винтовой механизм, продольный разрез; иа фиг. 2 - двухосевой шарнир, поперечный разрез; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг. 4 - электросхема соединений. Винтовой механизм содержит корпус 1, в котором при помощи двухосевого шарнира, состоящего из кольца 2 и винтов 3, установлена гайка 4, имеющая фланец 5, на котором равномерно по окружности закреплены не менее трех электромеханических, например пьезоэлектрических или магнитострикционных, вибраторов 6 одной из известных конструкций, контактирующих с корпусом 1. В корпусе 1 установлен с возможностью вращения и осевого перемещения винт 7, находящийся в резьбовом сопряжении с гайкой 4 и имеющий подвижное шпоночное соединение с рукояткой ручного привода 8, установленной на корпусе 1. На рукоятке ручного привода 8 установлены левого и правого вращения электроконтакты 9 и поворотное кольцо 10 с упором 11. Кольцо 10 фиксируется на рукоятке ручного привода 8 штифтом 12, пружиной 13 и шариком 14, входящим в отверстие на кольце 10. Рукоятка ручного привода 8 содержит электроконтактные кольца 15. В электроцепь питания вибраторов включены преобразователь 16 частоты и ранжирующее устройство 17 в качестве программного механизма поочередности подачи электрических импульсов на электромеханические вибраторы 6. Винтовой механизм работает следующим образом. При наличии повыщенного треиия в резьбовом сопряжении винтовой пары, например в результате воздействия нагрузки, поворачивают рукоятку ручного привода 8 за кольцо 10, например в правую сторону. Тем самым незначительно смещают кольцо 10 в пределах, ограниченных радиальным зазором расположения щтифта 12 в отверстии рукоятки ручного привода 8. При этом упор 11 замыкает электроконтакты 9 правого вращения, включая ту ветвь электроцепи питания вибраторов 6, которая через ранжирующее устройство 17 обеспечивает поочередность подачи импульсов правого вращения. Поочередность срабатывания электровибраторов 6 носит циклический характер, в результате чего фланец 5 и соединенная с ним жестко гайка 4 совершают прецессионное движение вокруг центра двухосевого шарнира, образованного кольцом 2 и винтами 3. При этом геометрическая ось гайки 4, наклоненная к оси винта 7 в пределах действительного радиального зазора в резьбовом сопряжении, описывает коническую поверхность вокруг оси винта 7. В результате сама гайка 4 не вращается, но генерирует вынужденное вращение винта 7 вокруг общей оси устройства б-б. Направление вынужденного вращения винта 7 совпадает с направлением вращения рукоятки ручного привода 8 от руки. В результате к усилию ручного прив.ода добавляется усилие вынужденного вращения, направленное в ту же сторону. Когда отпускают рукоятку, под воздействием фиксатора, состоящего из пружины 13 и шарика 14, кольцо 10 возвращается в исходное положение и отключает электроконтакты 9. Аналогичным образом осуществляется и обратное движение винта 7 при повороте кольца 10 в левую сторону и замыкании электроконтактов 9 левого вращения. На рукоятке ручного привода 8 может быть нанесена отсчетная шкала осевого перемещения винта 7, при этом рукоятка ручного привода 8 и винт 7 могут иметь как подвижное шпоночное, так и жесткое соединение. В случае жесткого соединения показания отсчетной шкалы соответствуют действительному перемещению с большей точностью. В предлагаемом изобретении погрешности изготовления вибраторов не сказываются на точности винтового механизма, которая зависит только от точностных характеристик резьбового сопряжения винтовой пары. Кроме того, под воздействием электромеханических вибраторов гайка в процессе работы
механизма наклонена к оси винта с выборкой радиального зазора в резьбовом сопряжении, что также повышает точность винтового механизма. Поскольку вынужденное вращение не самопроизвольно, а механически связано с ручным приводом и крайние положения винта легко ощущаются рукой, отпадает необходимость в наличии концевых микровыключателей, усложняющих конструкцию.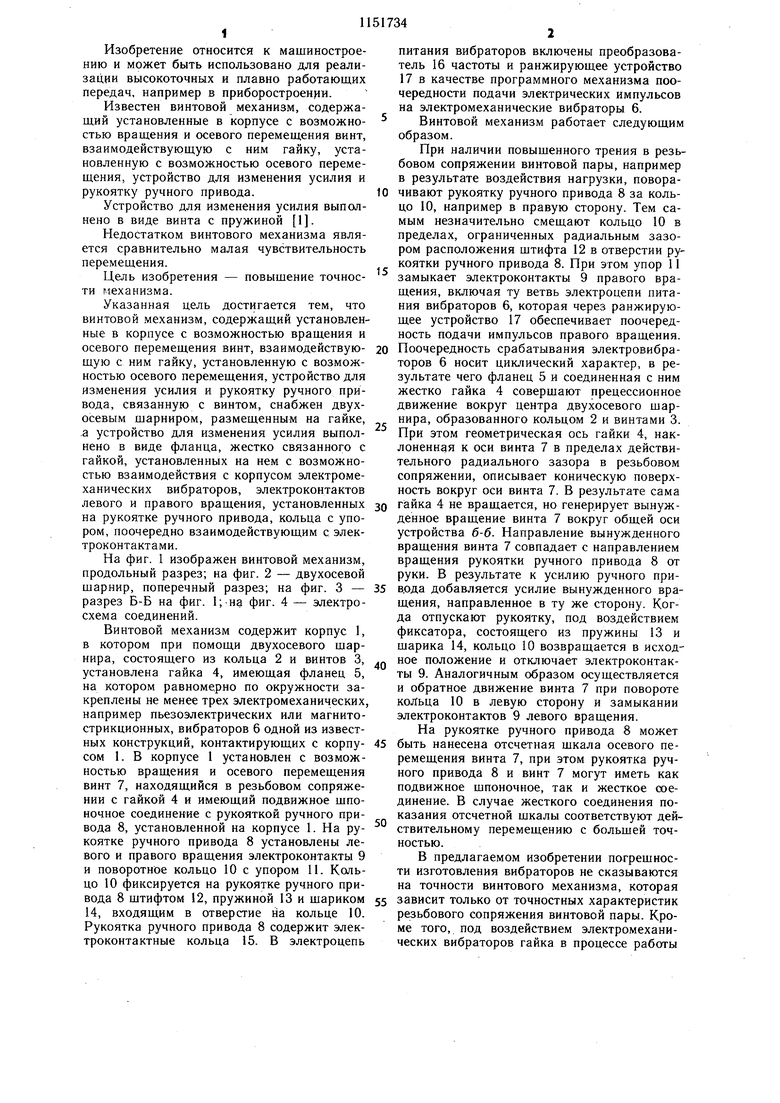
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 2006 |
|
RU2339858C2 |
| Безредукторный электрический привод запорной арматуры | 2016 |
|
RU2659703C2 |
| Устройство для ориентации, на-жиВлЕНия и НАВиНчиВАНия КРЕпЕжНыХдЕТАлЕй | 1978 |
|
SU806392A1 |
| Система управления колесным транспортным средством | 1987 |
|
SU1500533A1 |
| Полуавтоматический шлифовальный станок | 1950 |
|
SU89711A1 |
| Электромеханический привод поступательного действия | 2022 |
|
RU2786248C1 |
| Шпиндельный узел сверлильного станка | 1982 |
|
SU1093427A1 |
| РУЧНОЙ КОВРОТКАЦКИЙ СТАНОК | 1991 |
|
RU2057826C1 |
| УСТРОЙСТВО ДЛЯ НАРЕЗАНИЯ РЕЗЬБЫ НА КОНЦАХ ТРУБ | 2005 |
|
RU2297306C1 |
| РУЧНИЦА ГАЗОВАЯ | 1994 |
|
RU2093774C1 |
l
I l
ФигЛ
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Винтовой механизм | 1979 |
|
SU881437A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
