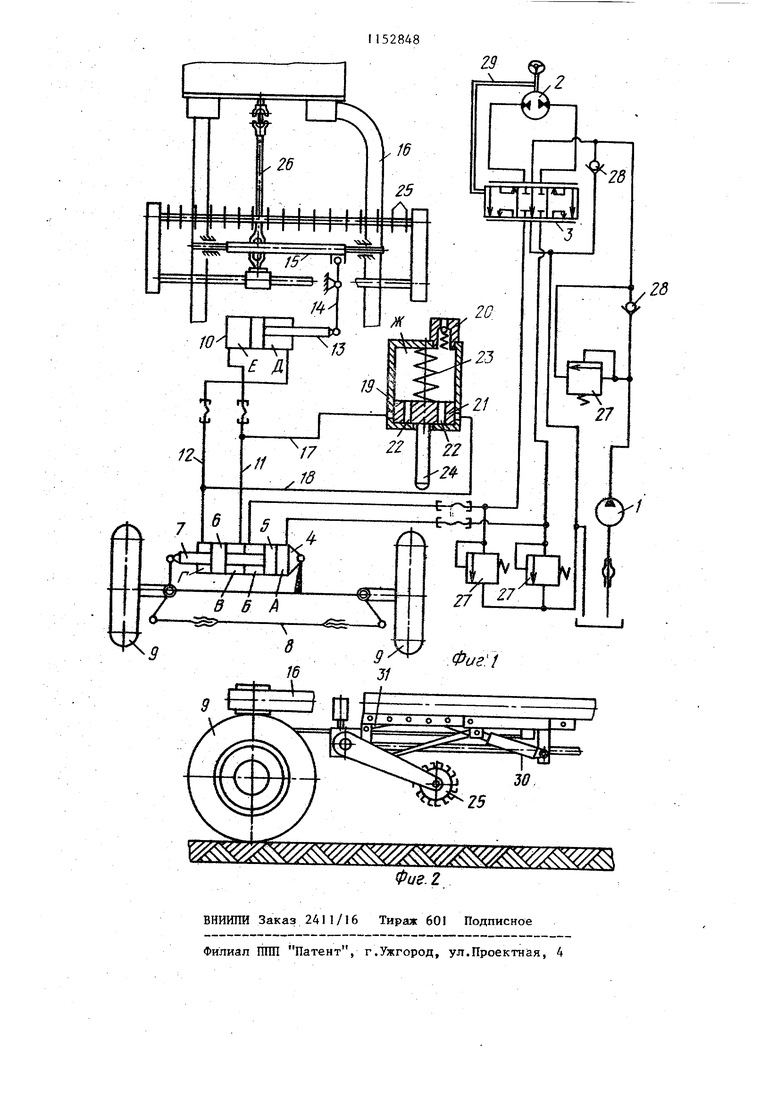
Изобретение относите к сельскохо зяйственному машиностроению, а именно к самоходным машинам, имеющим гидрообъемное рулевое управление и агрегатируемым с сельскохйзяйствен ным орудием, например культиватором КРМ-1,8, допускающим поперечное перемещение относительно рамы самоходной машины. Известен гидропривод рулевого управления самоходнйй машины, содержащий распределитель рулевого управления, гидравлически соединенный с гидронасосом, с гидробаком и с исполнительным гидроцилиндром поворота I. Однако данный привод выполняет функции только управления поворотом самоходной машины. Известна также гидравлическая система самоходной машины, содержащая гидропривод рулевого управления включакщий в себя гидрораспределитель, кинематически связанный с рулевым колесом и гидравлически сое диненный с гидронасосом, с гидробаком и исполнительным гидродилиндром поворота, и гидропривод управления рабочими органами, включающий в себя механизм подъема, и гидроци- линдр привода рабочего органа, кине матически связанный с последним 2 Однако известная гидравлическая система самоходной машины не обеспе чивает высокой точности движения рабочих органов сельскох;озяйственно То орудия по траектории управляемых колес, так как гидроцилиндр поворот самоходной машины не связан с гидро цилиндром сельскохозяйственного ору ция.. Это приводит при обработке сельскохозяйственных культур с мини мальными защитными зонами, например при культивировании рассады в закры том грунте культиватором КРМ-},8 в агрегате с самоходным шасси СШ-28Т5 к повреждению рассады и даже при незначительном отклонении рядков рассады от прямолинейности. Цель изобретения - повьш1ение качества работы путем увеличения то ности перемещения рабочего органа при изменении траектории движения управляемых колес. Указанная цель достигается тем, что гидравлическая система самоходной машины, содержащая гидропривод рулевого управления, включающий в себя гидрораспределитель, кинематически связанный с рулевьт колесом i и гидравошчески соединенный с гидронасосом, с гидробаком и с исполнительным гидроцилиндром поворота, и гидропривод управления рабочими органами, включающий в себя механизм подъема и гидроцилиндр привода рабочего орагана, кинематически связанный с последним, снабжена двумя дополнительными гидроцилиндрами, подвижный элемент первого из которых механически связан с подвижным элементом исполнительного гидроцилиндра поворота, подвижный элемент второго - подпружинен, выполнен со сквозными отверстиями для соединения полостей гидроцилиндра между собой и кинематически связан с механизмом подъема рабочего органа, при этом входные отверстия во втором дополнительном гидроцилиндре выполнены на одной высоте с возможностью их перекрытия подвижным элементом в положении максимального расжатия пружины, причем гидроцилйндр привода рабочего органа гидравлически соединен с обоими параллельно подключенными дополнительными гйдроцилиндрами. На фиг.1 изображена схема гидравлической системы самоходной машины; на фиг.2 - кинематическая связь гидрозамка с механизмом подъема сельскохозяйственного орудия. Гидравлическая система (фиг.1/ содержит гидронасос 1, обеспечивающий подачу рабочей жидкости через насосдозатор 2 и гидрораспределитель 3 к двухка 1ерному гидроцилиндру, представляющему собой гидроцилиндр поворота и первый дополнительный гидроцилиндр с поршнями 5 и 6, шток 7 которого связан через рулевую трапецию 8 с управляемыми колесами 9. Параллельно гид- роцилиндру 10 привода рабочего органа с трубопроводами 11 и 12, шток 13 которого с помощью рычага 14 кинематически связан с механизмом 15 поперечного перемещения сельскохозяйственного орудия относительно рамы 16 самоходной машины, с помощью трубопроводов 17 и 18 подключен второй дополнительный гидроцилиндр 19 с обратным гидроклапаном 20, поршень 21 которого имеет отверстия 22 и опирается на упругий элемент 23 со стороны, противоположной штоку 24.
Привод активных рабочих органов 25 сельскохозяйтсвенного орудия осуществляется через карданную передачу 26. Гидропривод рулевого управления вклю чает также предохранительные клапаны 27 и обратные клапаны 28, а также механическую связь 29 насоса-дозатора 2 и гидрораспределителя 3. Подъем сельскохозяйственного орудия осуществляется с помощью гидроцилиндра 30 и механизма подъема 31 (фиг.2К
При повороте самоходной машины гидронасос 1 подает рабочую жидкость к гидрораспределителю 3 и затем через насос-дозатор 2 к поршню 5 гидроцилиндра 4. В этом случае пропорционально перемещению насоса-дозатора 3 одновременно смещаются управляемые колеса 9 самоходной машины и поршень 6, жестко связанный через шток 7 с порщнем 5 гидроцилиндра 4. Например, при поступлении рабочей жидкости от насоса-дозатора 2 в полость А гнцроцилиндра 4 поршни 5 и 6 сме- . щаются влево, пропорционально поворачивая через рулевую трапецию 8 управляемые колеса 9. При этом поршень 6 гидроцилиндра 4 по трубопроводу 12 вытесняет рабочую жидкость из полости Г в полость Д гидроцилиндра 10, шток 13 которого с помощью рычага 14 перемещает механизм 15 поперечного перемещения сельскохозяйственного орудия в сторону смещения управляемых колес. Поскольку при опущенном сельскохозяйственном орудии отсутствует кинематическая связь (фиг.1) между щтоком 24 гидроцилиндра 1 9 и механизмом подъема 3I (фиг.2), то поршень 21 под действи ем упругого элемента 23 находится в нижнем положении, разобщая трубопроводы 17 и I8 и обеспечивая вытеснение рабочей жидкости из полости Е гидроцилиндра 10 только в полость В гидроцилиндра 4.
При поднятом сельскохозяйственном орудии 25 if фиг. 2 механизм подъема
31 через шток 24 сг-ещает поршень 21 гидроцилиндра 19 в верхнее положение , соединяя трубопроводы 17 и 18 между собой. В этом случае при смещении поршня 5 гидроцилиндра 4, например влево, рабочая жидкость из полости Г вытесняется по трубопроводу 1 8 и гидроцилиндру 19, находящемуся в открытом состоянии, в трубопровод 17 и полость в гидроципиндра 4, не вызывая смещения щтока 13 гидроцштиндра 10, поскольку на смещение механизма 15 необходимо определенное усилие. При поднятом поршне
21 полость Ж гидроцилиндра 19 через отверстия 22 сообщена с полостями В и Г гидроцилиндра 4 и Е и Д гидроцидиндра 10, компенсируя утечки жидQ кости.
Использование гидравлической системы для корректировки положения сельскохозяйственного орудия относк5 тельно рамы самоходной машины позволяет осуществить качественную обработку междурядий с минимальными защитными зонами, например при культивации рассады в закрытом грунте,
„ рассадо-посадочных работах и т.д. В этом случае направляющие колеса устанавливаются так, что машина :: движется прямолинейно, а рабочий орган сельскохозяйственного орудия между рядками и находится в поле зрения водителя. При смещении рабочего органа от середины обрабатываемого междурядья водитель производит корректировку положения рабочего органа. В этом случае управляемые колеса самоходной машины также поворачиваются на соответствующий угол, определяя необходимый курс движения самоходной машины. В подня том положении сельскохозяйственного орудия гидравлическая сисI тема не оказывает воздействие на управление самоходной машины.
| название | год | авторы | номер документа |
|---|---|---|---|
| Рулевое управление самоходной машины | 1983 |
|
SU1094788A1 |
| Гидравлическая система самоходной машины | 1985 |
|
SU1248877A1 |
| Гидравлическая система управления поворотом гусеничной машины | 1983 |
|
SU1134455A1 |
| Система рулевого управления транспортного средства | 1983 |
|
SU1115957A1 |
| Гидравлическая система рулевого управления транспортного средства | 1990 |
|
SU1703528A1 |
| Гидропривод скрепера | 1973 |
|
SU607905A1 |
| Гидропривод самоходного скрепера | 1988 |
|
SU1743966A1 |
| ТЯГОВО-ТРАНСПОРТНОЕ СРЕДСТВО | 2002 |
|
RU2232685C1 |
| Система рулевого управления транспортного средства (ее варианты) | 1982 |
|
SU1022853A1 |
| Гидропривод землеройной машины | 2022 |
|
RU2795877C1 |
. ГИДРАВЛИЧЕСКАЯ. СИСТЕМА САМОХОДНОЙ МАШИНЫ, содержащая гидропривод рулевого управления, включающий в себй гидрораспределитель, кинемати чески связанный с рулевым колесом и гидравлически соединенный с гидронасосом, с гидробаком и с исполнительным гидроцилиндром поворота, и гид} опривод управления рабочими органами, включающий в себя механизм подъема и гидроцилиндр привода рабочего органа, кинематически связанный с последним, отличающаяся тем, что, с целью повышения качества работы путем увеличения точности перемещения рабочего органа при измеиег НИИ траектории движения управляемых колес, она сиабжеиа двумя дополнительными гидроцилиндрами, подвижный элемент первого из которых механически . связан с подвиякиьм элементом исполнительного гидроцилиидра поворота, подвижный элемент второго - подпружинен, выполнен со сквозными отверстиями для соединения полостей гидроцнлиндра между собой и кинематически связан с механизмом подъема рабочего органа, при этом входные отверстия во втором дополнительном W гцдроцилиндре выполнены на одной высоте с возможностью их перекрытия подвижным элементом в положении максимального расжатия пружины, причем гидроциЛиндр привода рабочего органа гидравлически соединен с обоими параллельно подключенньвл дополнительными гидроцилиндрами.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Переносный кухонный очаг | 1919 |
|
SU180A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ крашения тканей | 1922 |
|
SU62A1 |
