f
Изобретение относится к судостро нию, в частности к устройствам для очистки корпуса судна.
Известно устройство для очистки корпуса судна, содержащее установленную на самоходной тележке телескопическую стрелу с гидроцшшндрами прижима, связанными через гидрораспределитель с гидросистемой и с электромеханическим преобразователем, кинематически связанным с датчиком прижима, при этом телескопическая стрела несет рабочую головку, включающую корпус с установленными на нем рабочими органами с
индивидуальнь м приводом LljНедостатком известного устройства является сложность конструкции.
Цель изобретения - упрощение конструкции путем обеспечения ориентации рабочих органов относительно обрабатываемой поверхности.
Поставленная цель достигается тем, что устройство для очистки корпуса судна, содержащее установленную на самоходной телеяже телескопическую стрелу с гидроцилиндрами прижима, связанными через гидрораспределитель с гидросистемой и с электромеханическим преобразователем, кинематически связанньв с дачиком прижима, при этом телескопическая стрела несет рабочую головку, включающую корпус с установленными на нем рабочими органами с индивидуальным приводом, снабжено дополнительными рабочими органами, установленными в корпусе рабочей головки с возможностью поворота относительно вертикальной оси, проходящей через их центр тяжести, и дополнительным датчиком прижима, установленным на корпусе головки, при этом основной и дополнительный датчики прижима кинематически связаны каждый с одним из дополнительных рабочих органов, упомянутьй электромеханический преобразователь неподвижно установлен на дополнительном датчике прижима.
Рабочие органы выполнены в виде барабанов с расположенными на них иглофрезами.
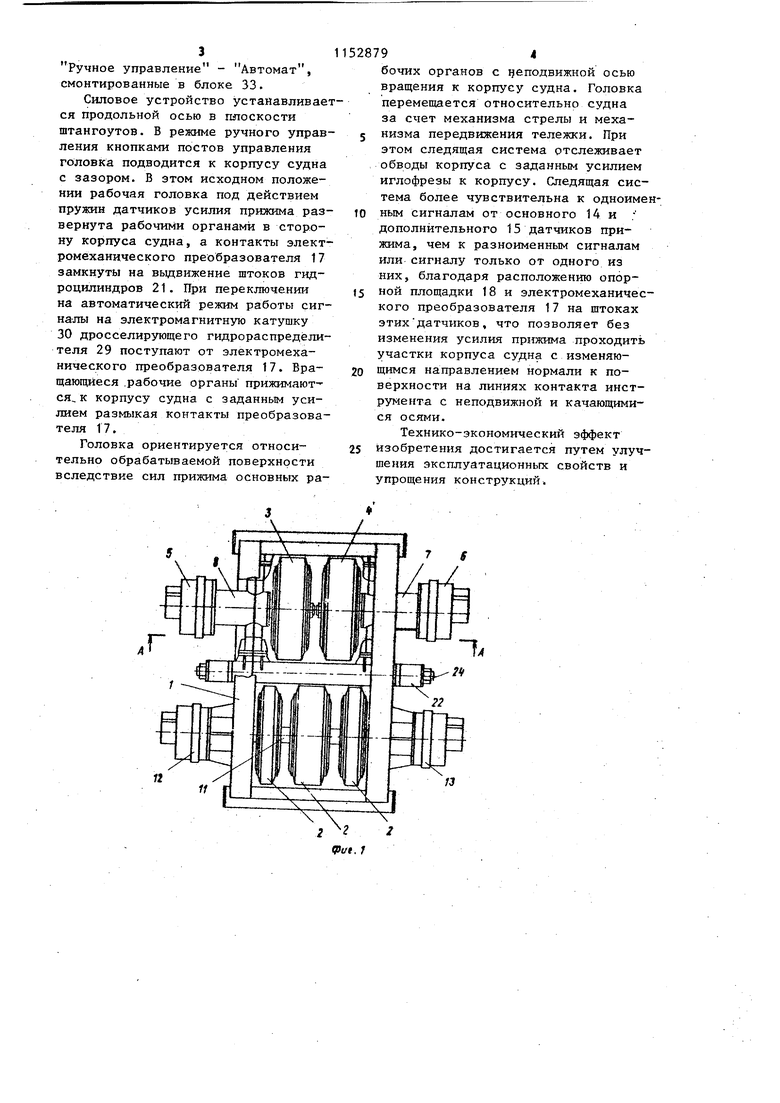
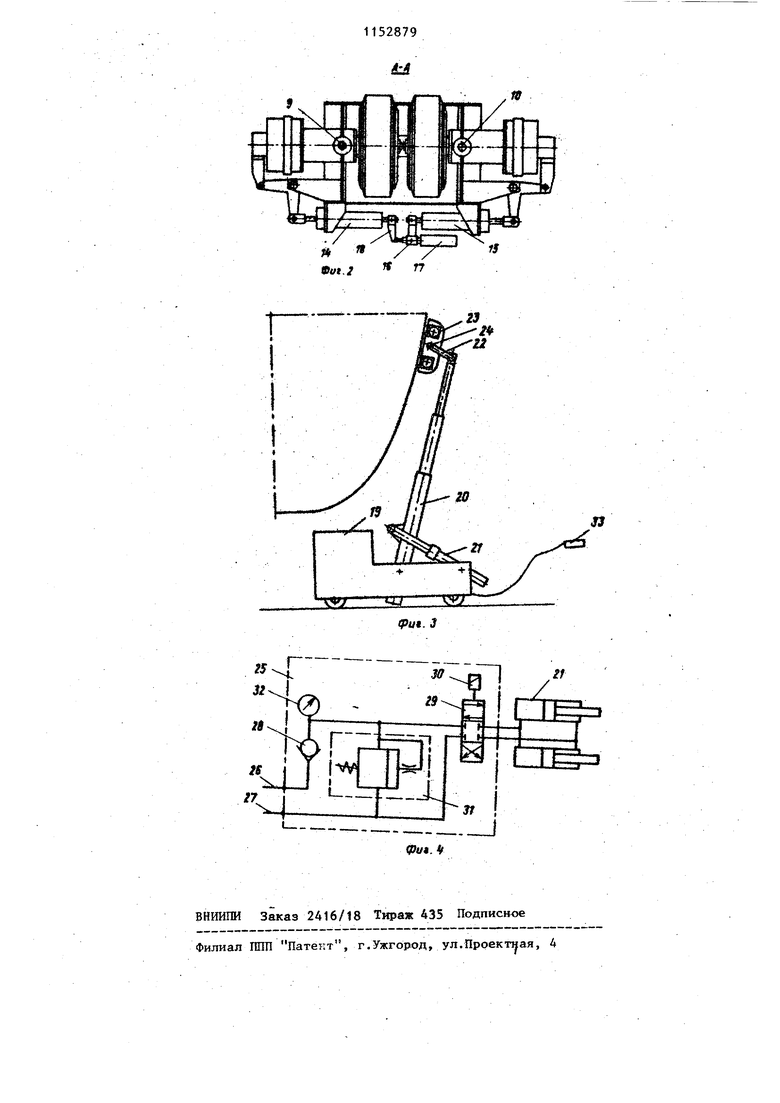
На фиг. 1 схематически изображена рабочая головка, общий вид-, на фиг, 2 - сечение А-А на фиг. 1, на фиг. 3 - предлагаемое устройство общий вид; на фиг. 4 - гидравлическая схема пульта,управления.
528792
Устройство содержит рабочую головку, включающую корпус 1 с установленными на нем основными 2 и дополнительными 3 и i рабочими органами с индивидуальным приводом 5 и 6. Дополнительные рабочие органы 3 и 4 установлены в корпусе 1 соответственно в подшипниках 7 и 8 с возможностью поворота каждого относительно соответствующей вертикальной . .оси цапф 9 и 10, проходящей через центр тяжести соответствующего рабочего органа. На корпусе 1 установлены основные рабочие органы 2,
15 связанные с общим валом 11 с инди. видуальными приводами 12 и 13 их
вращения, а также основной 14 и
дополнительный 15 датчики прижима,
каждый из которых кинематически
20 связан с соответствующим дополнительным органом 3 и 4. При этом на дополнительном датчике 15 прижима установлен посредством кронштейна 16 электромеханический преобразователь 17, кинематически связанный с основным датчиком 14 прижима через закрепленную на этом датчике опорную площадку 18, Рабочие органы выполнены в виде барабанов с игло30 Фрезами. Устройство содержит самоход ную тележку 19, телескопическую стрелу 20 с механизмом вьщвижения, шарнирно закрепленную на платформе тележки, гидроцилиндры 21 прижима,
2J шарнирно связанные с нижним звеном телескопической стрелы и платформой тележки. На вилку 22, соединенную с верхним звеном телескопической стрелы 20 поворотно относительно
4Q продольной оси стрелы, навешивается головка 23 через ось 24, проходящую через центр тяжести всей головки. На тележке 19 расположен пульт 25 управления, к которому
45 подводятся напорная 26 и сливная 27 магистрали силового устройства. Рабочая жидкость через обратный клапан 28 поступает к дросселирующему гидрораспределителю 29 с электромагjg нитной катушкой 30, управляющему механизмом прижима. Переливной клапан 31 поддерживает заданное по манометру 32 давление путем непрерывного слива рабочей жидкости.
Дистанционное управление осуществляется электрической схемой, содержащей кнопочные посты управления, переключатель режима работы 3 Ручное управление - Автомат, смонтированные в блоке 33. Силовое устройство устанавливае ся продольной осью в плоскости штангоутов. В режиме ручного управ ления кнопками постов управления головка подводится к корпусу судна с зазором. В этом исходном положении рабочая головка под действием пружин датчиков усилия прижима раз вернута рабочими органами в сторону корпуса судна, а контакты элект ромеханического преобразователя 17 замкнуты на выдвижение штоков гидроцилиндров 21. При переключении на автоматический режим работы сиг налы на электромагнитную катушку 30 дросселирующего гидрораспредели теля 29 поступают от электромеханического преобразователя 17. Вращающиеся .рабочие органы прижимаются, к корпусу судна с заданным усилием размыкая контакты преобразова теля 17. Головка ориентируется относительно обрабатываемой поверхности вследствие сил прижима основных ра 9 бочих органов с цеподвижной осью вращения к корпусу судна. Головка перемещается относительно судна за счет механизма стрелы и механизма передвижения тележки. При этом следящая система отслеживает обводы корпуса с заданным усилием иглофрезы к корпусу. Следящая система более чувствительна к одноименным сигналам от основного 14 и ; дополнительного 15 датчиков прижима, чем к разноименным сигналам или сигналу только от одного из них, благодаря расположению опорной площадки 18 и электромеханического преобразователя 17 на щтоках этихдатчиков, что позволяет без изменения усилия прижима проходить участки корпуса судна с изменяющимся направлением нормали к поверхности на линиях контакта инструмента с неподвижной и качающимися осями. Технико-экономический эффект изобретения достигается путем улучщения эксплуатационных свойств и упрощения конструкций. irf
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для очистки корпуса судна | 1983 |
|
SU1134473A1 |
| Устройство для обработки корпуса судна | 1983 |
|
SU1109334A1 |
| Устройство для обработки корпуса судна в доке | 1982 |
|
SU1039803A1 |
| Манипулятор для очистки днищевой части корпуса судна | 1990 |
|
SU1743987A1 |
| УСТРОЙСТВО ДЛЯ ОЧИСТКИ КОРПУСОВ СУДОВ | 1969 |
|
SU243424A1 |
| КРАН-МАНИПУЛЯТОР | 2002 |
|
RU2240972C2 |
| КРАНОМАНИПУЛЯТОРНАЯ УСТАНОВКА | 1999 |
|
RU2167803C2 |
| Устройство для обработки корпуса судна в доке | 1983 |
|
SU1105387A1 |
| Устройство для очистки и окраски корпуса судна | 1977 |
|
SU735479A1 |
| ЛЕСОЗАГОТОВИТЕЛЬНАЯ МАШИНА С ТЕЛЕСКОПИЧЕСКОЙ СТРЕЛОЙ | 1991 |
|
RU2025061C1 |
1. УСТРОЙСТВО ДЛЯ ОЧИСТ-t КИ КОРПУСА СУДНА, содержащее установленную на самоходной тележке телескопическую стрелу с гидроцилиндрами прижима, связанными через гидрораспределитель с гидросистемой и с электромеханическим преобразователем, кинематически связанныи с датчиком прижима, при этом телескопическая стрела несёт рабочую головку, включающую корпус с установленными на нем рабочими органами с индивидуальнм приводом, о т л и ч а ю щ е е с я тем, что, с целью упрощения конструкции путем обеспечения ориентации рабочих органов относительно обрабатьшаемой поверхности, оно снабжено дополнительными рабочими органами, установленными в корпусе рабочей головки с возможностью поворота относительно вертикальной оси, проходящей через их центр тяжести, и дополнительным датчиком прижима, установленным на корпусе головки, при этом основной и дополнительный датчики прижима кинематически связаны каждый с одним из дополнительных рабочих органов, а упомянутый электромехнический преобразователь неподвижно установлен на дополнительном (П С датчике призшма. 2. Устройство по п. 1, отличающееся тем, что рабочие органы выполнены в виде барабанов с расположенными на них иглофрезами.
I
iff
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР по заявке № 3583110/27-11, кл | |||
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
