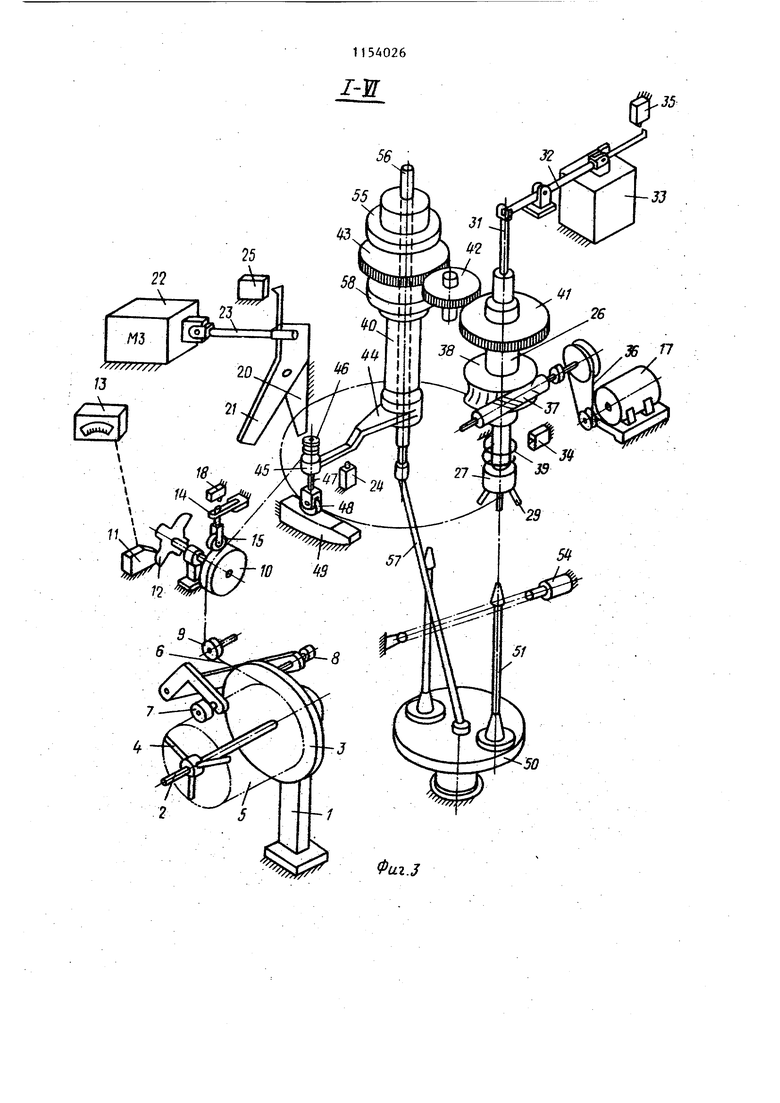
Изобретение относится к устройствам для отмеривания и резки длинномерного нежесткого материала, типа нитевидного шнура, провода и т.п., и может быть использовано в авиацион ной, радиотехнической, электротехнической и др. промьгашенностях. Целью изобретения является расширение технологических возможностей путем обеспечения резки и намотки мягких материалов типа шнуров. На фиг. 1 показана кинематическая схема автомата на фиг. 2 вид А на фиг. 1, на фиг. 3 - узлы IVI на фиг. 1; на фиг. 4 - схема расположения механизмов автомата в момент начала намотки. Автомат состоит из кинематически связанных с приводом вращения (фиг. разматывающего механизма I, механизма отмеривания II с мерным колесом, меха низма резки III, механизма намо ки IV, механизма заправки конца.материала V в механизм намотки и приei fioro механизма VI. Разматывающий механизм I (фиг.З) содержит основание 1, на оси 2 кото рого закреплен упорный диск 3. К ди ку 3 с помощью гайки 4 поджата боби на 5 с намотаннь на нее мягким матерналом, например матерчатым шнуром 6. Для обеспечения постоянного натя ;жения шнура 6 во время работы автом та разматывающий механизм I снабже натяжным роликом 7, контактирующим с бобиной 5. По мере уменьшения диа метра бобины 5 за счет фрикционной пары: упор 8 и диск 3 производится подтормаживание разматывающего меха низма I. Ролики 9 направляют шнур 6 . во время его прохода через узлы автомата. Механизм отмеривания длины II (фиг. 1 и 3) включает мерное колесо 10, которое через конечный переключатель 11 и крестовину 12 подает электрические сигналы на счетчик 13 импульсов, настроенный на заданную длину отрезки шнура 6 определенным количеством импульсов. Над мерным колесом 10 установлен узел 14 контроля качества подаваемого шнура. В случае обрыва шнура 6 ролик 15 поднимается (или опускается) под деист вием пружины 16 и отключает привод автомата через конечные выключате,ли 18 и 19. Механизм резки III (фиг. 1 и 3) содержит неподвижный нож 20 и подвижный нож 21. Движение ножа 21 осуществляется от электромагнита 22 через штангу 23. Сигнал на срабатывание электромагнита 22 подается от конечного переключателя 24 (фиг. 3), а возврат ножа 21 в исходное положение - от конечного переключателя 25. Механизм намотки IV (фиг. 1 иЗ) содержит укрепленную на корпусе 26 намоточную головку 27, в которой на шарнире 28 закреплены пальцы 29. Пружины 30 растяжения удерживают пальцы 29 в наклонном положении относительно продольной оси йамоточной головки. При помощи штанги 31, проходящей в корпусе 26, обеспечивается поворот пальцев 29 относительно шарниров 28. Штанга 31 через коромысло 32 шарнирно соединена со штоком электромагнита 33. Штанга 31 осуществляет .движение намоточной головки 27 вдоль своей продольной оси. Электромагнит 33 электрически связан с КП 34 (фиг. 2), а КП 35 с приводом 17. Вращение намоточной головки 27 осуществляется от привода 17 через клиноременную передачу 36, червяк 37 и колесо 38 (фиг.1). Пружина 39 кручения обеспечивает необходимый крутящий момент для намотки шнура 6. Механизм заправки конца материала V в механизм намотки (фиг.З) состоит из корпуса 40, который получает вращение от привода 17 через червячную пару 37-38 и зубчатые колеса -4Лг 43. На корпусе 40 жестко закреплена штанга 44. На конце штанги 44 закреплен неподвижный зажимной диск 45 и подвижной зажимной диск 46. Ось вращения штанги 44 параллельна оси вращения намоточной головки 27. Подвижный зажимной диск 46 закреплен на конце штока 47, на другом конце которого установлен подпружиненный относительно неподвижного зажимного диска 45 толкатель 48. При вращении штанги 44 вокруг продольной оси корпуса 40 толкатель 48 контактирует с кулачком 49. При йзаимоДействии толкателя 48 с выступом кулачка 49 подвижный зажимной диск 46 отходит от неподвижного зажимного диска 45. При взаимодействии толкателя 48 с впадиной кулачка 49 зажимные диски 45 и 46 сходятся, образуя захват для шнура 6.
Приемный механизм VI включает диск 50-со штырями 51. По мере заполнения штырей 51 бобинами они поворачиваются вместе с диском и останавливаются соосно намоточной головки 27. Положение останова обеспечивается КП 52 и 53, фотореле 54 контролирует заполнение штырей 51 мотками.
Вращение диска 50 осуществляется от привода 17 через электромагнитную муфту 55 и вал 56, связанный со штангой 57.
Автомат работает следующим образом.
Бобина 5 со шнуром 6 монтируется на ось 2 и поджимается гайкой 4 к торцу диска 3. Ролик 7 отведен в сторону. После закрепления бобины 5 ролик 7 опускается на нее. Шнур пропускается через направляющие ролики 9, мерное колесо 10 и зажимается между дисками 45 и 46 (зона Г на фиг. 1). Толкатель 48 в момент зацепления шнура 6 размещен во впадине кулачка 49.
При пуске автомата срабатьгоает электромагнит 33. Штанга 31 поднимается в намоточной головки 27, освобождая зону для прохода штанги 44 с зажимными дисками 45 и 46.
При подъеме штанги 31 через коромысло 32 срабатывает КП 35, которьй включает электромагнитную муфту 58 и привод 17. Вращение от привода 17 передается через червячную пару 3738 на корпус 40 и штангу 44, которая несет зажатый между дисками 45-46 конец шнура 6. Поворачиваясь по стрелке А (фиг. 2) штанга 44 тянет за собой сматывающийся с бобиной 5 шнур 6. При этом толкатель 48 сходит b кулачка 49, протягивая его через механизм йамотки IV (через зону А). Шнур 6 располагается под пальцами 29 Дойдя до КП 34 штанга 44 останавливается (зона В фиг. 2). Срабатывает электромагнит 33 и электромагнитная муфта 58.
После остановки штанги 44 шнур 6 находится в натянутом состоянии межд дисками 45 и 46 и мерным колесом 10. Механизмы автомата в это время расположены вдоль следа натянутого шну-. ра в следующей последовательности (фиг. 4): разматьшаемый механизм I,механизм резки III, механизм намотки IV, зажимные диски 45 и 46. Намоточная головка 27 с пальцами 29 под действием пружины 39 опускается, приводя в движении коромысло 32, которо включает КП 35, а он в свою очередь через клиноременную передачу 36 и червячную пару 37-38 включает привод 17. Пальцы 29 намоточной головки 27 вращаются и наматьшают на себя проходящий шнур 6. При первых оборо- так намоточной головки 27 конец шнура 6, зафиксированный между дисками 45 и 46 вытягивается и дальнейшее наматывание шнура 6 на пальцы 29 происходит за счет сматывания шнура со свободно враш.ающейся бобины 5.
Необходимая длина отрезаемого шнура запрограммирована количеством импульсов, поступающих от КП 11 на счетчик 13 импульсов от вращающейся крестовины 12. При заданном количестве импульсов от счетчика 13 импульсо подается электрический сигнал на электромагнитную муфту 58, которая передает вращение штанги 44. Штанга 4 передает вращение на захватные диски 45 и 46 в зону Г (в направлении стрелки А фиг. 2) до тех пор, пока толкатель 48 не вступит во взаимодействие с кулачком 49. Затем натянутый шнур 6 располагается между зажимными дисками 45 и 46. При дальнейшем движении штанги 44 толкатель 48 опускается по кулачку 49 и шнур 6 зацепляется между дисками 45 и 46. Одновременно Срабатывает КП 24, отключается привод 17 и подается команда на электромагнит 22, связанный через штангу 23 с подвижным ножом 21.
Подвижной нож 21 нажимает на . РШ 25, который включает электромагнит 33, поднимает штангу 31. Пальща 29 поворачиваются относительно шарниров 28 к их оси вращения. Сформированный на пальцах 29 моток освобождается от их действия к падает на один из штырей 51 механизма намотки IV, который останавливается соосно намоточной головке 27 от срабатывания КП 52 и 53. Одновременно при подъеме штанги 31 происходит переключение контактов КП 35, включающих рривод 17. Затем через червячнзто рару 37-38 и зубчатые колеса 41-43 и электромагнитную муфту 44 в. зону В (фиг. 2). Дойдя до КП 34 штанга останавливается. Цикл работы повторяется.
После полного заполнения одного штыря 51 мотками срабатывает фотореле 5 нитную штангу )115А026 которое включает электромаг- рый подводит очередной свободный муфту 55 и через вал 56 и штырь 51 соосно намоточной голов57 включает привод 17, кото- ке 27.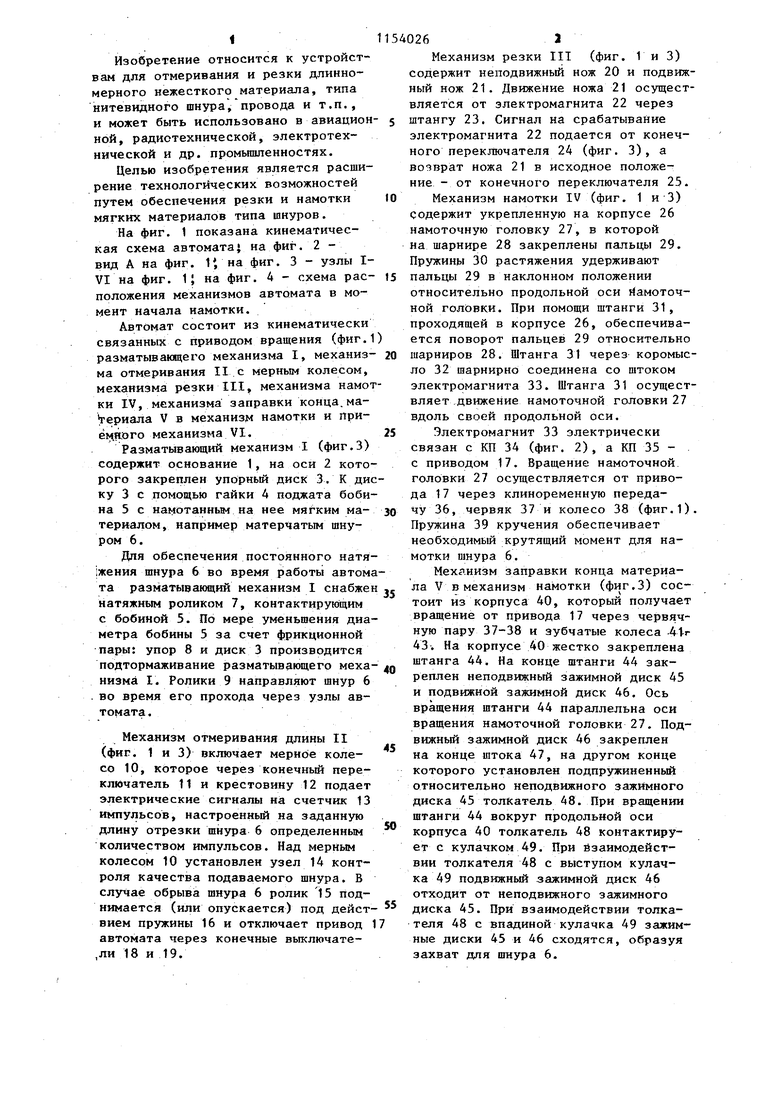

| название | год | авторы | номер документа |
|---|---|---|---|
| Намоточная головка | 1980 |
|
SU930405A2 |
| Устройство для обвязки бухт, механизм захвата и подачи бухт и механизм подачи обвязочного материала | 1989 |
|
SU1703560A1 |
| Автомат для изготовления выводов полупроводниковых резисторов | 1970 |
|
SU494779A1 |
| Устройство для образования выводных концов электрической катушки | 1987 |
|
SU1522308A1 |
| Автомат для изготовления электрических катушек | 1981 |
|
SU1023419A1 |
| Автомат для изготовления электрических катушек | 1977 |
|
SU728175A1 |
| Автомат для изготовления седлообразных катушек | 1977 |
|
SU736190A1 |
| Автомат для намотки электрических катушек | 1984 |
|
SU1244731A1 |
| Станок для намотки волновых обмоток статоров электрических машин | 1989 |
|
SU1791914A1 |
| Многопозиционный сверлильный автомат | 1977 |
|
SU663499A1 |

АВТОМАТ ДЛЯ ОТМЕРИВАНИЯ И РЕЗКИ ДЛИННОМЕРНОГО МАТЕРИАЛА, содержащий размещенные на станине приводные н кинематически связанные между собой разматывающий «еханизм, механизм отмеривания с мерньм колесом, подакшр й механизм, механизм резки и механизм намотки, отличающийся тем что, с целью расшиW. -.лн.сж№гк:-а рения технологических возможностей путем обеспечения резки и намотки мягких материалов типа шнуров, он имеет механизм заправки конца материала в механизм намотки, состоящий из закрепленного на станине кулачка, смонтированной с возможностью поворота на корпусе механизма намотки штанги, закрепленного на конце щтанги неподвижного зажимного диска, размещенного на конце штанги подпружиненного толкателя, установленного с возможностью осевого перемещения при взаимодействии с кулачком, и закрепленного на толкателе подвижного жимного диска, при этом механизм намотки установлен с возможностью осевого возвратно-поступательного .перемещения а его ось параллельна оси вращений штанги. J - ь
If6
X)
Iff
ВидА
Г
А
29
%
в
Фи.г.3
10
л
/г.хГТТЬч
| .Авторекое свидетельство СССР № 431938, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Устройство для мерной резки кабеля | 1973 |
|
SU484922A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
