Предлагаемый спос.об определения величины отклонения геометрического центра деталей машин от заданной геометрической оси предназначен к использованию, главным образом, при выполнении следующих основных видов работ по монтажу валопроводов: установке дейдвудных труб, кронштейнов, двигателей и подшипников валопровода; расточке дейдвудных и кронштейновых втулок г- допускаемыми эксцентриситетам определении расцентровки взаимно-удаленных частей валопровода определении поправок на несоосность дейдвудных труб и кронштейнов определении деформаций корпуса судна в районе валопровода.
Применение данного способа имеет целью ускорение н облегчение работ но монтажу валопроводов при высокой точности центровки.
Известны устройства для центрирования валов при помощи пучка Световых лучей, испускаемого источником света, собираемого линзой и определяющего геометрический центр цоднп-гпника, дсйдвудной трубы, кронштейна или рамы двигателя, подлежащих установке. Отличительная особенность предлагаемого способа заключается в тем, что источник света вращают вокруг геометрической оси установки и фотографируют пучок лучей в разных угловых положениях при помощи фотоаппарата, монтированного соосно с устанавливаемой деталью, и по фотографии замеряют отклонение центра детали от геометрической оси вращен1 5; источника света. Ось вращения луча источника света является осью тоге участка валопровода, положение которого принимается за базу; на строящемся судне луч устанавливается по теоретической оси валоцровода. Положение оси вращения луча относительно рамки фотоснимка, связанной с центрируемым элементом валопровода, дает необходимые размеры для корре тировки или фиксации положения зтого элемента валопровода.
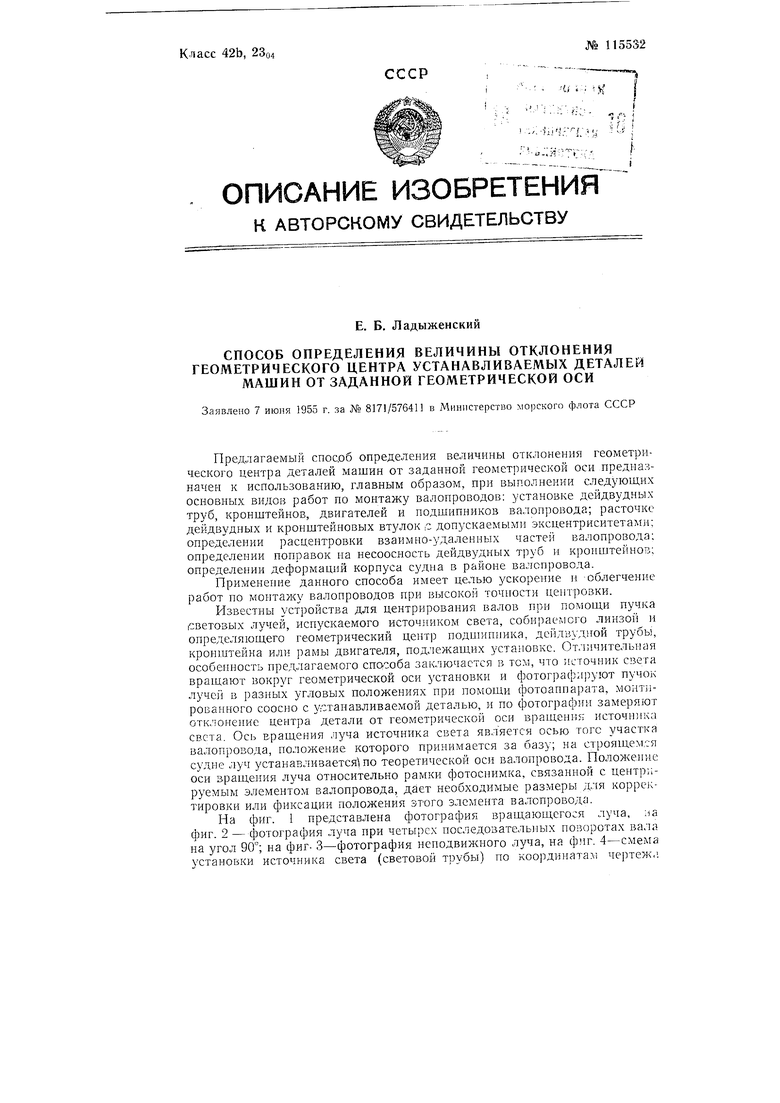
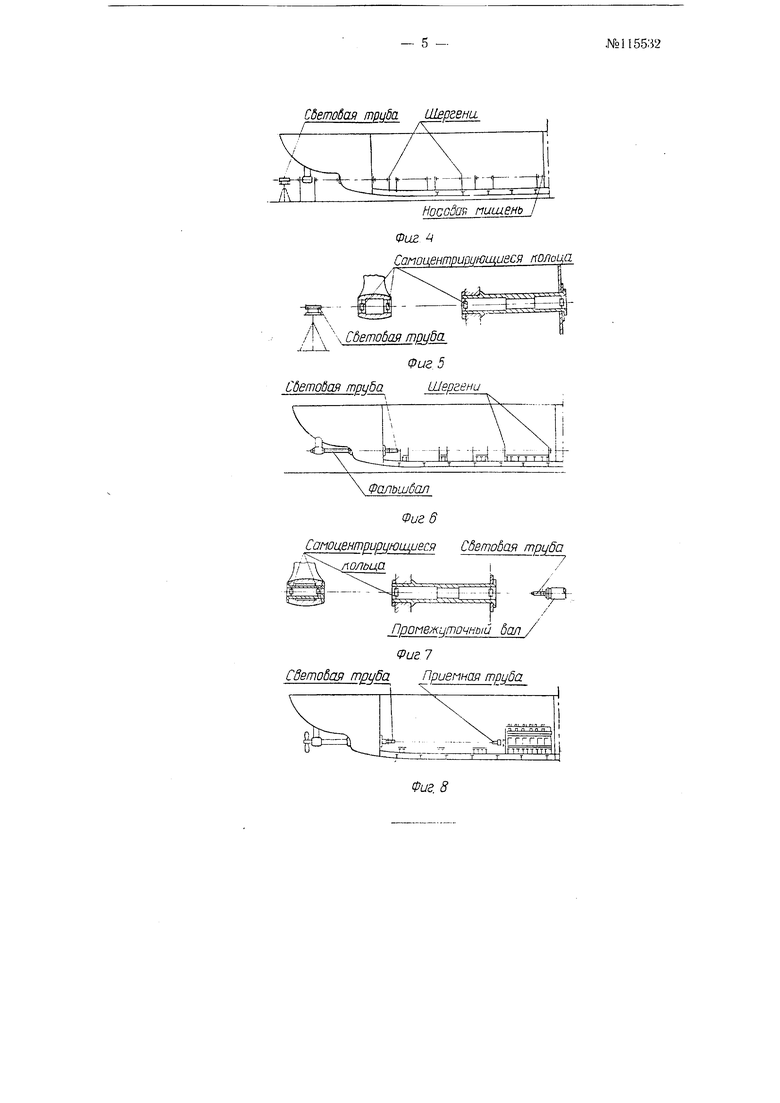
Па фиг. 1 представлена фотография вращающегося луча, .,„ фиг. 2 - фотография луча при четырех последовательных поворотах вала на угол 90°; на фиг- 3-фотография неподвижного луча, на фиг. 4-смема установки источника света (световой трубы) по коо 1динатам чертеж,.
Wb 115532
судна; на фиг. 5 - схема установки самоцентрирующихся колец; на фиг. 6 - схема установки источника света и фальшвала; на фиг. 7 - схема установки при центровке гребного вала; на фиг. 8-схема установки при определении расцентровки взаимно-удаленных частей валопровода.
В зависимости от условий, имеющихся на ремонтируемом или строящемся судне, различаются три вида фотосъемки.
Съемка вращающегося луча применяется в случаях, когда центрирующий (принимаемый за базу) вал имеет привод, сообщающий ему равномерное вращение. При этом виде сьемки луч описывает на снимке окружность (фиг. 1). Съемка луча в четырех положениях применяется в случаях, когда центрирующий вал не имеет равномерно вращающего привода. При этом снимок состоит из отпечатков луча, получаемых путем поворота центрирующего вала на угол в 90° (фиг. 2).
Съемка неподвижного луча применяется в случае отсутствия самого центрирующего вала, а также при работах по определению деформации корпуса судна, съемка неподвижного луча показана на фиг. 3.
Съемка производится в полумраке. Попадапие на фотопленку сосредоточенного постороннего света не допускается. После съемки луча производится подсветка снимка фонариком либо спичкой.
Как видно из фиг. 1, ось вращения луча (центр луча) смещена вниз и на левый борт от центра рамки снимка. Это означает, что центрируемый элемент валопровода необходимо подавать вниз и на левый борт для совмещения с осью луча (осью центрирующего вала), на фиг. 2 центр луча смещен на левый борт, на фиг. 3 - вверх и на правый борт.
При установке дейдв Дных труб, кронштейнов, фундаментов двигателей и подшипников в случаях, когда ни один из указанных элементов валопровода еще не установлен, работы производятся в следующем порядке. Источник света, дающий узкий пучок параллельных лучей, устанавливается по координатам теоретического чертежа в кормовой точке валопровода и направляется в нО|Совую контрольную мишень (фиг. 4).
В местах установки фундаментов главных двигателей, упорных и опорных подшипников, а также в районе установки кронштейна крепятся щергени: один к носу, другой - к корме на расстоянии 0,5 м от места установки каждого фундамента.
В шергенях крепятся планки с квадратным отверстием так, чтобы световой луч падал на бумагу, подложенную под планку, не более, чем в 10 мм от центра выреза. Таким же образом крепятся планки на мортире и наклепыше кормовой переборки.
Последовательной установкой фотоаппарата в каждой из планок производится съемка неподвижного луча. Полученные сноски снимков переносятся на нониусные фиксаторы, которые устанавливаются в планках шергеней. Между каждой парой шергеней через шайбы фиксаторов натягиваются короткие струны, служащие базой для измерений при уставовке фундаментов и кронштейна.
На торцах мортиры и наклепыше кормовой переборки наносятся окружности под расточку посадочных мест под дейдвудную трубу. Центрами этих окружностей являются сверления в шайбах нониусных фиксаторов.
Проверка соосности кронштейна с дейдвудной трубкой производится после их установки следующим образом.
В носовой и кормовой частях кронштейна и дейдвудной трубы устанавливаются центрирующие кольца (фиг. 5).
Последовательной установкой аппарата в каждом из центрирующих колец производится съемка неподвил ного луча.
В случаях, когда при установке кронштейна положение источника света не изменялось, отклонения центра луча от центров снимка показывают величину погрешности установки кронштейна и дейдвудной трубы.
Эти погрешности устраняются при расточке дейдвудной трубы и кронштейна. Полученные сноски снимков переносятся па нониуспые фиксаторы, установленные в центрируюших кольцах. На торцах кронштейна и дейдвудной трубы пано,сятся контрольные окружности под расточку.
Если при установке кронштейна требуется источник света снять, то для проверки соосности кронштейна с дейдвудной трубой нет надобности снова устанавливать этот источник точно по координатам теоретического чертежа.
Труба устанавливается с таким расчетом, чтобы луч прошел .через все отверстия в планках примерно в центре отверстия с допускаемым отклонением 10 мм,
Определение поправок на несоосность в этом случае производится расчетомАналогично производится определение положений осей частей валопровода при монтаже главных двигателей (фиг. 6), при центровке гребного вала (фиг. 7), определение взаимного положения частей валопровода (фиг. 8) и определение деформаций корпуса судна.
Предмет изобретения
Способ определения величины отклонения геометрического центра устанавливаемых деталей машин от заданной геометрической оси при помощи светового луча, проектируемого на устанавливаемую деталь, отличающийся тем, что источник света вращают вокруг заданной геометрической оси установки, фотографируют проекцию луча на фотопленку аппарата, укрепленного соосно с устанавливаемой деталью, и замеряют на снимке отклонение оси детали от геометрической оси вращения, определяемое по положению проекций светового луча в разных угловых положениях источника света относительно рамки снимка, получаемой подсветкой последнего.
- 3 -№ 115532
f
%
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ изготовления внутреннего отверстия в трубе при помощи расточного устройства | 2024 |
|
RU2839745C1 |
| Оптический способ центровки судовых механизмов | 1977 |
|
SU658041A1 |
| Устройство для пробивки линии оси валопровода корабля | 1947 |
|
SU71673A1 |
| ДЕЙДВУДНОЕ УСТРОЙСТВО СУДОВОГО ВАЛОПРОВОДА | 1991 |
|
RU2023625C1 |
| Способ определения величины отклонения от параллельности оси шатунной шейки относительно оси коленчатого вала | 1960 |
|
SU141633A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ПОЛОЖЕНИЯ МОНТИРУЕМОГО АХТЕРШТЕВНЯ | 1990 |
|
RU2013284C1 |
| СПОСОБ ЦЕНТРОВКИ СУДОВОГО ВАЛОПРОВОДА И ОПТИЧЕСКИЙ ТЕНЗОМЕТР ДЛЯ НЕГО | 2017 |
|
RU2715081C2 |
| Дейдвудное устройство | 1978 |
|
SU704853A1 |
| Дейдвудное устройство | 1983 |
|
SU1154145A1 |
| Способ статической балансировки гребных винтов | 1981 |
|
SU996882A1 |
«St
e
