Мзо)|к тение относмтсн к мяи1мм(нтро( нию, а HMtnnio к вспомогательным у|.Ч|ойствам, используемым при проиедении CB;I рочимх работ м может быть исртользовамо, в частности для микронлнзмснной cB;if)KH иялогабаритных изделий со сложной конфигурацией )HOFo 1нва, например, зубных протгзов. а также изделий, пыиолнсниы.х из тонколистовою металла или фольги цветных металлов.
Цель изобретения - повышение надежности фиксации изделий путем фиксации зажимных губок в положении закрепления изделия и ofieciieiieHHH спарки изделия в различр ых пространственных положениях.
На фиг. изображен манипулятор, общий вид и сечеиие Л- Л; на фит . 2 вид Б на фиг. 1.
На основании 1 жестко закреплена стойка 2 с отверстиями 3. Со стойкой 2 посредством оси 4 соединена вилка 5 с резьбовым хвостовиком 6. Ось 4 закреплена гтри помощи гайки 7 и тарельчатых шайб 8 и 9, вследствие чего вилка имеет возможность поворота с приложением некоторого усилия. Корпус захвата выполнен в виде направляющей трубки 10 с ввинченным в ее тело хвостовиком , шаровой опоры 2 при иомощи которой она опирается на торец хвостовика 6 вилки 5 и удерживается в специальной полости гайкой 13 с рукояткой 14.
В теле трубки 10 выполнены два диаметральных сквозных отверстия 15 и 16 и сквозной продольной паз 17. В отверстии 15 жестко посажен штифг 18 с оиирг1юи1ейся на него 1найбой 19, а через отверстие 16 пропущена ось 20 захвата. Через паз 17 пропущена пот1ерс чиая ось 21, концы которой закреплены в стеиках рукоятки 22, надетой на корпусе трубки 10. Цилиндрическая пружина 23 сжатия опирается одним концом в неподвижную шайбу 19, а другим --- в смонтированный на корпусе толкатель 24.
Кроме того, захват содержит двуплечие рычаги 25 и 26, шарнирно закрепленные из (ки 16 трубки 10, на концах длинных плеч рычагов выполнены зажимные губки 27 и 28, а концы коротких плеч при помоши тяг 29 и 30 соединены шарнирно с (юперечной осью 21 и упираются в толкатель 24. Причем тяги 29 и 30 в местах соединения с осью 21 п л11олнены с продольными пазами, совпадающими по направлению с пазом 17 трубки 10.
Фиксатор размещен во внутренней полости корпуса трубки К., и содержит закрепленную в трубке цилиндрическую вставку 31 с внутренним коническим отверстием 32, комический палец 33, закре(ленный на иомеречной оси 21 соосно вставке 31, цилинлричес.ую пружину 34 растяжения, закреп;1енHV.O одним концом на штифте 18, а другим ия оси lil.
Л иин11у.1ягор работает следующим образом.
Jl.MH захвата снарииаомшо рукоятку 22 пере.м 1М.ПЮТ вдоль оси по трубке 10 (влево). При этом по11еречная ось 21, няходяшаяся у задней кромки пазов тяг 29 и 30, перемещаясь вместе с руч(.1яткой 22 вдоль riHua 17 вместе с пружиной 34, извлекает конический палец 33 из конического спворстия 32, вставки 31 и через параллелограмм, обра.зованный рычагами и тягами, раскрывает 1убки 27 и 28 захвата. Црч этом пружина 34 разгружается, а пружина 23 сжимается. В раскрытую полость между губками 27 и 28 помешают свариваемое изделие.
Для зажатия изделия одновременно, придерживая ег( рукой, отпускают плавно рукоятку 22. При этом ) 23, разжимаясь, переметает поперечную ось 21, которая действуя на рычаги и тяги параллелограмма,
смыкает губки 27 и 2В, зажимая изделие. Д. надежного фиксирования изделия, зажатого в захвате, рук(1ятку 22 подают еще дальше в направлении изделия. При этом гюперечная ось 2 вместе с закрепленным на ней пальцем 33 перемещается и не воздействует на тяги 29 и 30 вдоль паза 17 трубки 10 и пазов в тягах 29 и 30 и вводит палец 33 в комическое отверстие 32 вставки 3 до их плотного заклинивания.
Для извлечения сваренного изделия элементы устройства работают как и в случае захвата изделия. Важно отметить, что поггеречная ось 21 при пальце 33, извлеченном из вставки 31, всегда прижата к задней стенке тяг 29 и 30 под действием Г ружины растяжения 27. Этот ход и обеспечиваст фиксирование.
Манипулирование изделием в процессе сварки осуществляется поворотом захвата манипулятора рукой оператора при помощи трубки-рукоятки 22. При этом перемещение захвата обеспечивается за счет шарнирного соединений вилки 5 и стойки 2 и вследствие шаровому сочленению опоры 2 трубки 10 с гайкой 13 стойки 2.
Вследствие того, что в предлагае.мом мани уляторе. захват снабжен фиксатором и рукояткой для закрепления, фиксации и раскрепления изделия, в корпусе и тигах выполнены пазы, в рукоятке закреплена подпружиненная относительно корпуса поперечная ось, размещенная в пазах корпуса и тяг, при этом прдпружинениый толкатель смонтирован на корпусе с возможностью пе)емещения относительно неf о. а ()иксато) в виде смонтированной в корпусе рставки с внутренним коническим отверстием и конического пальца,
J закр,ч1ленио1-о на 11О11()счн(;й оси рукоятки с возможностью н.заимоленстния с отверстием всгивки. обсспечииастся 6i).ieo надежная (Ьикс.чиня изделий.
Q
CM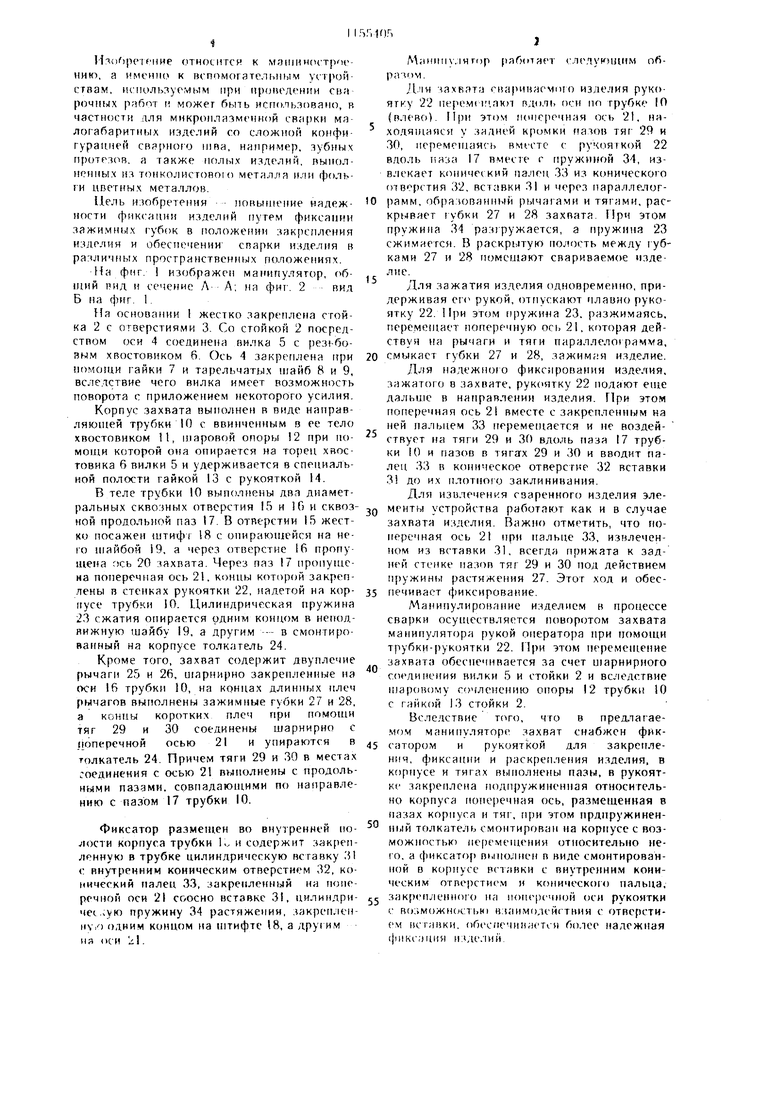
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подвязывания растений к шпалерной проволоке | 1980 |
|
SU854322A1 |
| Устройство для обвязки бухт, механизм захвата и подачи бухт и механизм подачи обвязочного материала | 1989 |
|
SU1703560A1 |
| Устройство для фиксации и прижима свариваемых деталей | 1977 |
|
SU707741A1 |
| Устройство для формования изделий "мюзле | 1977 |
|
SU751485A1 |
| Станок для намотки якорей коллекторных электрических машин | 1988 |
|
SU1649622A1 |
| Устройство для захвата и кантования грузов с центральным отверстием | 1985 |
|
SU1393765A1 |
| Клещевая подача для универсально-гибочных автоматов с приводом от центральной шестерни | 1987 |
|
SU1547916A1 |
| Устройство для выдачи билета и сдачи | 1979 |
|
SU868800A1 |
| Автоматическая сборочная линия | 1985 |
|
SU1296350A1 |
| Кантователь | 1973 |
|
SU524652A1 |
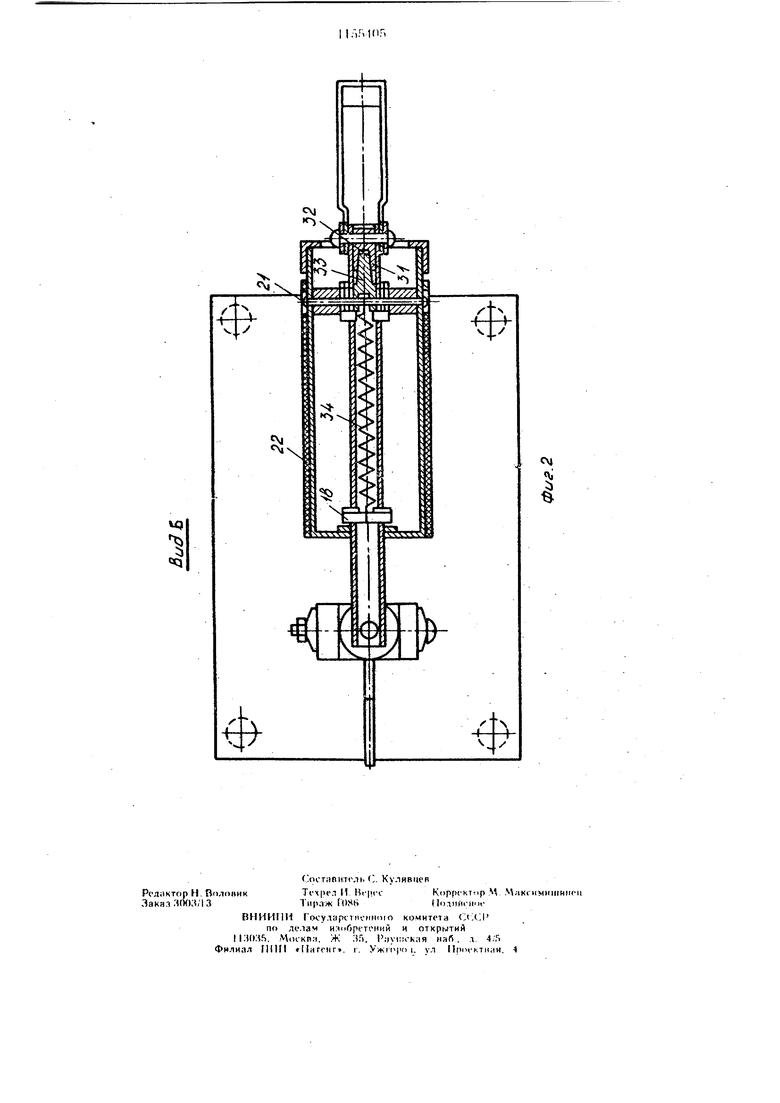
МАНИПУЛЯТОР ДЛЯ МИКРОСВАРКИ, содержащий смонтированную на основании стойку с шарнирно закрепленным на ней захватом для фиксации изделий, выполненным в виде корпуса, шарнирно закрепленных на корпусе двуплечих зажимных рычагов, соединенных тягами с подпружиненXvCvvvvvvvvv К- А Л Л / / / 3 V V V V у ным толкателем, отличающийся тем, что, с целью повышения надежности фиксации изделий, захват снабжен фиксатором и рукояткой для закрепления, фиксации и раскрепления изделия, в корпусе и тягах выполнены пазы, в рукоятке закреплена подпружиненная относительно корпуса поперечная ось, размеш.енная в пазах корпуса и тяг, при этом подпружиненный толкатель смонтирован на корпусе с возможностью перемещения относительно него, а фиксатор выполнен в виде смонтированной в корпусе вставки с внутренним коническим отверстием и конического пальца, закрепленного на поперечной оси рукоятки с возможностью взаимодействия с отверстием вставки. д д / . ZQ JO
| Евстифеев Г | |||
| А | |||
| и Веретенников И | |||
| С | |||
| Средства механизации сварочного производства | |||
| М., «Машиностроение, 1972, с | |||
| Механический грохот | 1922 |
|
SU41A1 |
| рис | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Устройство для выпрямления многофазного тока | 1923 |
|
SU50A1 |
