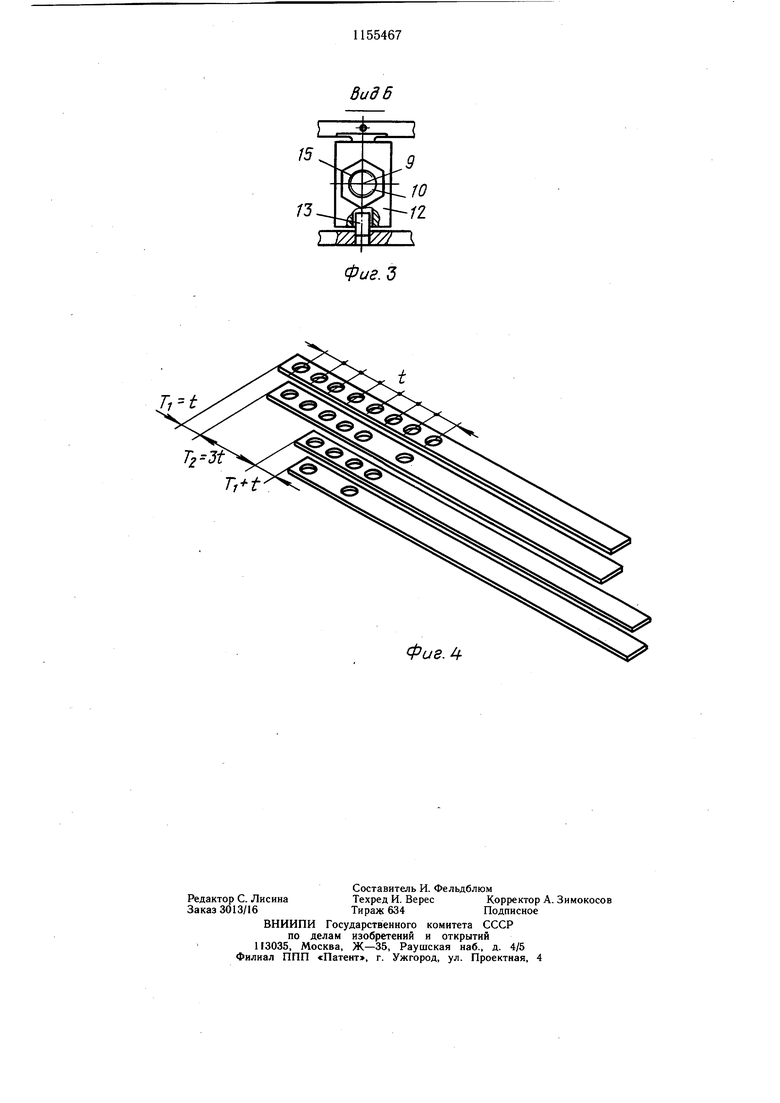
Изобретение относится к машиностроению, а именно к конструкциям подающих органов пресса. Цель изобретения - расширение технологических возможностей и повышение производительности за счет автоматизации процесса обеспечения возможности изменения шага подачи по заданному закону. На фиг. 1 схематически показан предлагаемый привод, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - вид Б на фиг. 1; на фиг. 4 - заготовки с измененным шагом подачи. Привод содержит закрепленные на ползуне 1 пресса направляющие 2, к которым через регулировочный винт 3 прикреплен корпус 4. Клин 5 жестко соединен с рычагом 6, который через шарнир 7 связан с корпусом 4, а шарниром 8 соединен с винтом 9, на который навернуты гайки 10 и 11. Гайка 10 размещена в отверстии упора 12, который щарнирами 13 соединен с корпусом 4. В нижней части клин 5 связан с поршнем 14 силового цилиндра механизма поворота клина, размещенным в корпусе 15, соединенным шарниром 16 с корпусом 4. Полость силового цилиндра магистралью 17 соединена с пневматическим распределителем 18, золотник которого установлен с возможностью взаимодействия с кулачком 19 командоаппарата 20, включающего ведомую 21 и ведущую 22 звездочки, соединенные между собой цепью 23. Ведущая звездочка 22 связана с коленчатым валом 24 пресса. Вход пневматического распределителя соединен с источником давления. Ролик 25, смонтированный на оси 26 на приводном рычаге 27, постоянно прижат к поверхности клина 5 тягой 28пневмоцилиндра (не показан). Устройство работает следующим образом. Ролик 25 приводного рычага 27 постоянно прижат тягой 28 пневмоцилиндра к поверхности клина 5, в связи с чем при перемещении клина 5 совместно с ползуном 1, {//////Л ////////} /// у//////л Фиг.2 У///////Л/777. приводной рычаг 27, поворачиваясь на определенный угол, приводит в качательное движение кинематически связанные с ним элементы подающего механизма пресса. При повороте клина 5 перемещается рычаг 6 и связанный с ним винт 9, который при движении вверх упирается через гайку 10 в нижнюю плоскость упора 12, а при движении вниз - через гайку 11 в верхнюю плоскость упора 12. Различные угловые положения поверхности клина 5 определяют различные перемещения ролика 25 и, соответственно, различные щаги подачи подающего механизма. Положение плоскости клина 5 устанавливается порщнем силового цилиндра. Первое пунктирное положение поверхности клина 5, определяющее щаг подачи Tt t, устанавливается при подаче воздуха в силовой цилиндр, а второе положение поверхности клина 5, определяющее наибольший шаг подачи , устанавливается при отсутствии воздуха в силовом цилиндре. Подача воздуха в полость силового цилиндра осуществляется через распределитель 18. Вращение вала командоаппарата 2 осуществляется от коленчатого вала 24 пресса через звездочки 21, 22 и цепь 23. Заданный закон изменения величины щага подачи в процессе работы пресса осуществляется соответствующим профилем кулачка 19 командоаппарата 20 и кинематической связью вала командоаппарата 20 с коленчатым валом 24 пресса. Так, например, если законом изменения величины щага подачи является цикличное его изменение, приведенное для случая вырубки из полосы одновременно двух деталей, два хода пресса образуют цикл изменения величины шага подачи Ti t; Ta 3t, кулачок 19 командоаппарата 20 должен делать один оборот за два оборота коленчатого вала 24 пресса и иметь профиль, обеспечивающий нажатие золотника распределителя 18 командоаппарата 20 на угле 180°. Экономический эффект достигается путем повышения производительности и расширения технологических возможностей.
Фиг.Ъ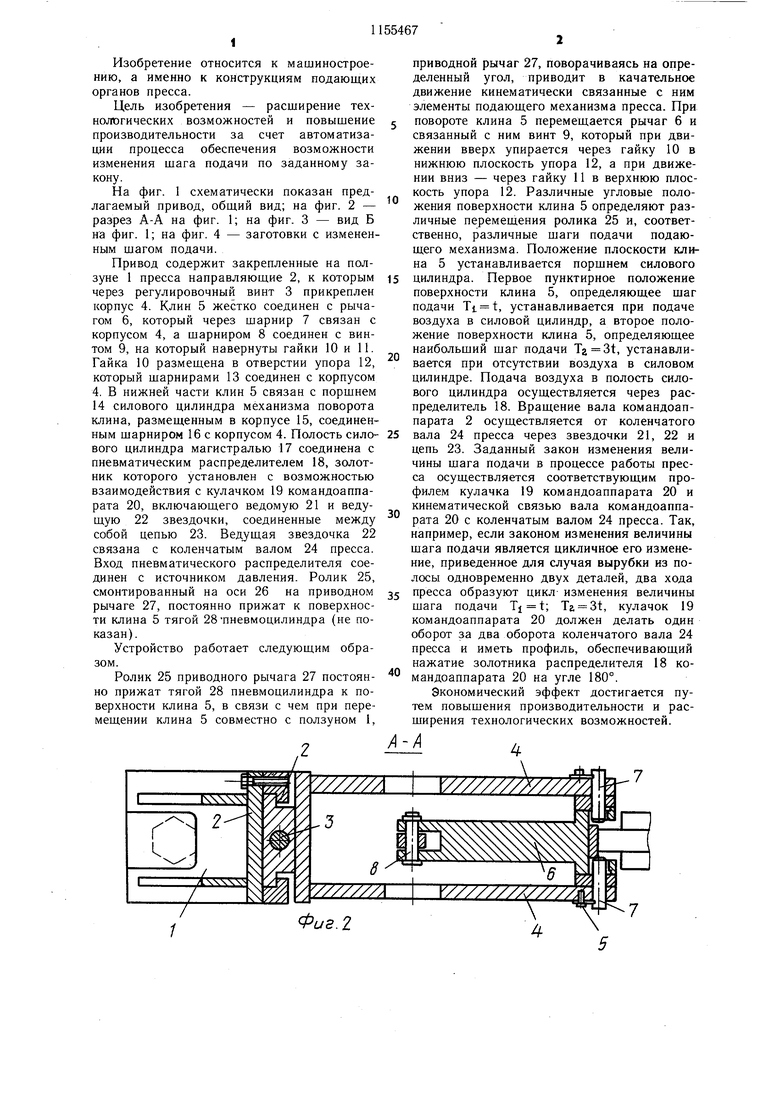
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подачи длинномерного материала в зону обработки | 1983 |
|
SU1199376A1 |
| ГИДРОПУЛЬСАЦИОННЫЙ ПРЕСС | 1991 |
|
RU2010658C1 |
| Устройство для подачи длинномерного материала к прессу | 1983 |
|
SU1117108A1 |
| Устройство для подачи материала под штамп механического пресса | 1955 |
|
SU108902A1 |
| ГОРИЗОНТАЛЬНО-КОВОЧНАЯ МАШИНА | 2005 |
|
RU2310540C2 |
| Устройство к прессу с приводным валом для подачи полосового и ленточного материала в рабочую зону | 1981 |
|
SU1013050A1 |
| Автоматический штамповочный комплекс для изготовления деталей из полосы и устройство для отделения от стопы полосы и подачи ее в рабочую зону пресса | 1990 |
|
SU1756000A1 |
| Механический пресс | 1982 |
|
SU1071358A1 |
| Автомат для навивки пружин | 1980 |
|
SU895576A1 |
| Устройство для подачи длинномерного материала в зону обработки | 1983 |
|
SU1107931A1 |
ПРИВОД ПОДАЮЩИХ ОРГАНОВ ПРЕССА, включаюшего источник давления и коленчатый вал, содержаший клин, шарнирно смонтированный на ползуне с возможностью взаимодействия с роликом приводного рычага, а также механизм поворота клина, отличающийся тем, что, с целью повышения производительности и расширения технологических возможностей за счет автоматизации процесса и изменения шага подачи по заданному закону, механизм поворота клина выполнен в виде силового цилиндра с поршнем и Командоаппарата с пневматическим распределителем, при этом силовой цилиндр смонтирован на ползуне и его поршень шарнирно соединен с клином, вход пневматического распределителя соединен с источником давления, выход - с полостью силового цилиндра, а командоаппарат кинематически связан с коленчатьщ валом. jg 21 
| Привод подающих органов пресса | 1975 |
|
SU535989A1 |
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
| Игнатов А | |||
| А | |||
| и др | |||
| Кривошипные горячештамповочные прессы | |||
| М., «Машиностроение, 1974, с | |||
| Прибор для измерения силы звука | 1920 |
|
SU218A1 |
| Халат для профессиональных целей | 1918 |
|
SU134A1 |
